

Грузовые автомобили, тракторы, пневмоколесные тягачи
Грузовыми автомобилями, тракторами, пневмоколесными тягачами и созданными на их основе прицепными и полуприцепными транспортными средствами общего и специального назначения осуществляются основные перевозки строительных грузов в строительстве. Кроме того, автомобили, тракторы и тягачи используются как тяговые средства прицепных и полуприцепных строительных машин, а также в качестве базы для кранов, экскаваторов, бульдозеров, погрузчиков, бурильных установок, коммунальных и других машин. Автомобили, тракторы, тягачи изготовляются серийно, поэтому многие их сборочные единицы широко используются в конструкциях различных строительных машин.
Грузовые автомобили. Основными частями грузового автомобиля массового производства являются двигатель 1, кузов 2 и шасси 3 (рис.50.). Шасси включает силовую передачу (трансмиссию), несущую раму, на которой установлены двигатель, кабина, передний и задние мосты с пневмо-колесами, упругая подвеска, соединяющая мосты с рамой, механизм управления и электрооборудование.
По конструкции кузова различают автомобили общего назначения и специализированные. Автомобили общего назначения имеют кузов в виде неопрокидывающейся открытой платформы с откидными бортами для перевозки любых видов грузов, специализированные — для перевозки определенного вида груза. Кроме того, грузовые автомобили классифицируются по типу двигателя, проходимости, грузоподъемности и другим факторам. На грузовых автомобилях применяют поршневые двигатели внутреннего сгорания, работающие на бензине или газе (карбюраторные), на тяжелом топливе (дизельные), газотурбинные. Дизельные двигатели получили преимущественное распространение, газотурбинные применяют на автомобилях очень большой грузоподъемности. В зависимости от грузоподъемности мощность двигателей автомобилей общего назначения 60…220, а автомобилей тягачей достигает 500 кВт.
По проходимости автомобили делятся на дорожные, рассчитанные для эксплуатации по всем дорогам общей дорожной сети, повышенной и высокой проходимости по всем видам дорог различного состояния и внедорожные (карьерные). Автомобили повышенной и высокой проходимости в зависимости от типа движителя разделяются на колесные, колесно-гусеничные, на воздушной подушке и автомобили-амфибии. Внедорожные автомобили применяют на стройках и разработках полезных ископаемых открытым способом и используются на дорогах со специальным основанием.
Главным параметром, определяющим конструкцию автомобиля, является нагрузка на одиночную ось. Правилами дорожного движения установлены предельные нагрузки на одиночную ось автомобиля — 100 кН для дорог с усовершенствованным покрытием и 60 кН для общей дорожной сети. Эти требования не распространяются на внедорожные автомобили. Для обеспечения высокой проходимости и требований по нагрузке на ось бортовые автомобили и седельные тягачи выпускаются с двумя, тремя ведущими осями и более. Такие автомобили получили большое распространение. Прицепы и полуприцепы разделяются на прицепы, буксируемые автомобилем с помощью дышла (одно-, двух- и многоосные), прицепы-роспуски для перевозки длинномерных грузов, полуприцепы, буксируемые седельными тягачами. Седельные тягачи изготовляют на базе шасси бортового автомобиля, но с укороченной базой. На раме такого тягача укрепляется опорная плита с седельно-сцепным устройством, которое воспринимает нагрузку от полуприцепа и передает ему тяговое усилие, развиваемое двигателем автомобиля.
Тракторы гусеничные и колесные используются для перемещения тяжелых грузов по грунтовым и временным дорогам. Агрегатируются они с бортовыми и саморазгружающимися прицепами, а также с прицепными и навесными строительными машинами (скреперами, бульдозерами экскаваторами, кранами – трубоукладчиками и др.). Гусеничные тракторы обладают малой нагрузкой на грунт и большой силой тяги. Поэтому они имеют более высокую проходимость, чем колесные. Максимальная скорость их перемещения составляет 12 км/ч. Колесные тракторы более маневренны, имеют большую транспортную скорость — 40 км/ч. Давление на грунт колесных машин 0,2… 0,35 МПа, гусеничных 0,1 МПа. Главным параметром тракторов является максимальное усилие на крюке, по которому их разделяют на классы. Максимальное усилие на крюке измеряют при скорости 2.6…3 км/ч для гусеничных и 3,0…3,5 км/ч — для колесных. Усилие на крюке гусеничных тракторов примерно равно их массе, а колесных — 0,5…0,6 от массы.
Промышленностью выпускаются тракторы сельскохозяйственного типа классов тяги 6, 9, 14, 20, 30, 40, 50, 60, 90, 150 и 250 кН и промышленного типа классов тяги 100, 150, 200, 250, 350, 500 кН. Тракторы промышленного типа изготовляются различных модификаций, т.е. с учетом установки на них погрузочного, бульдозерного, рыхлительного, кранового и другого оборудования. Мощность двигателей тракторов достигает 800 кВт, а иногда и более. Трактор состоит из рамы, силовой передачи, гусеничного или колесного движителя и управления. Кроме того, все тракторы комплектуются гидравлической системой для привода навесного или прицепного рабочего оборудования.
У пневмоколесных тракторов с шарнирно-сочлененными полурамами каждая из полурам опирается на ведущий и управляемый мосты. Поворот передней полурамы относительно задней осуществляется с помощью двух гидроцилиндров на угол до 40 ° в каждую сторону. Такие тракторы обладают большей маневренностью по сравнению с тракторами с передней управляемой осью. Силовая передача трактора существенно отличается от силовой передачи автомобиля. В ней отсутствует дифференциал, а поворот машины осуществляется торможением одной из гусениц. Силовые передачи тракторов выполняются механическими, гидромеханическими и электрическими.
На гусеничной раме 4 установлены ведомые звездочки с натяжным устройством гусеничной цепи. Бортовые редукторы увеличивают крутящий момент на ведущих звездочках. Бортовые фрикционы представляют собой многодисковые фрикционные муфты, которые в замкнутом (включенном) состоянии обеспечивают прямолинейное движение трактора. Изменение направления движения достигается частичным или полным выключением одного из бортовых фрикционов с одновременным торможением его ведомых дисков с помощью ленточного тормоза. Ленточные тормоза используются также для торможения обеих гусениц при движении на уклонах и как стояночные тормоза. Для плавного бесступенчатого регулирования скорости в широком диапазоне в зависимости от внешней нагрузки силовая передача дополняется гидравлическим ходоуменьшителем, позволяющим работать на пониженных (до 1 км/ч) скоростях.
В силовых передачах гусеничных и колесных тракторов, одно- и двухосных тягачей, специальных шасси одноковшовых погрузчиков, самоходных кранов автомобильного типа широко применяют гидродинамические передачи. В таких передачах вместо муфты сцепления устанавливают гидравлический трансформатор, а жесткую кинематическую связь между двигателем и ведущими колесами (звездочками гусениц) заменяют жидкостной. Такие силовые передачи называются гидромеханическими.
При больших сопротивлениях движению (при трогании с места, движении на подъем или в трудных дорожных условиях) используется способность гидротрансформатора увеличивать крутящий момент двигателя с высоким коэффициентом трансформации.
По мере снижения сопротивления движению постепенно снижается трансформация момента, плавно возрастает скорость ведущих колес, а работа трансформатора переходит в режим с болен высоким КПД. При этом переключение передач осуществляется автоматически т.е. высшие передачи включаются тогда, когда вторичный вал достигает определенной частоты вращения. При этом двигатель работает в режиме максимальной мощности, а переключение передач происходит без разрыва крутящего момента. Отсутствие жесткой кинематической связи двигателя с ведущими звездочками снижает динамические нагрузки на двигатель, повышает долговечность двигателя и силовой передачи.
В гусеничных тракторах с электрической силовой передачей момент ведущим звездочкам гусениц сообщается тяговым электродвигателем постоянного тока через бортовые фрикционы и редукторы. Тяговый электродвигатель получает питание от генератора, вращаемого дизелем трактора. Система привода дизель—генератор—двигатель значительно упрощает кинематическую схему силовой передачи (отсутствуют коробка перемены передач, карданные валы), а главное — обеспечивает в широких пределах бесступенчатое регулирование скорости движения и момента в зависимости от внешней нагрузки. Гидромеханическая и электрическая силовые передачи наиболее полно отвечают режиму работы тракторов с прицепным и навесным рабочим оборудованием строительных машин.
Пневмоколесные тягачи. Такие одно- и двухосные тягачи предназначены как базовые машины для работы с различного рода прицепным (одноосные) и навесным и прицепным (двухосные) рабочим оборудованием строительных машин
Пневмоколесные тягачи обладают высокими тяговой характеристикой, транспортными (до 50 км/ч и более) скоростями, большим диапазоном рабочих скоростей, хорошей маневренностью, что способствует достижению высокой производительности строительных машин, создаваемых на их базе.
Пневмоколесные тягачи собирают из узлов и деталей серийного производства тракторов и тяжелых автомобилей при широкой степени унификации, что делает их конструкцию более долговечной. Мощность дизелей тягачей достигает 900 кВт при нагрузке на ось 750 кН и более, что обеспечивает реализацию одного из главных направлений развития строительной техники — создания машин большой единичной мощности.
Одноосный тягач состоит из шасси, на котором установлены двигатель, силовая передача, два ведущих колеса, кабина и опорно-сцепное устройство. Опорно-сцепное устройство выполнено в виде стойки, которая может качаться вокруг продольной горизонтальной оси, закрепленной в раме тягача, что позволяет полуприцепу перекашиваться относительно тягача в вертикальной плоскости. Соединяется полуприцеп с тягачом вертикальным шкворнем. Поворот тягача относительно оси полуприцепа обеспечивается двумя гидроцилиндрами на угол до 90° в обе стороны. Гидромеханическая силовая передача включает в себя раздаточную коробку, гидротрансформатор, коробку перемены передач, карданные валы, мост с главной передачей и дифференциалом, полуосямии планетарные редукторы, встроенные в ступицы ведущих колес. Оба ведущих колеса являются одновременно и управляемыми.
Коробку перемены передач и гидротрансформатор часто монтируют в одном корпусе, что делает конструкцию более компактной. От раздаточной коробки через вал приводится в действие один или несколько масляных насосов, обеспечивающих работу исполнительных органов полуприцепной машины. Управление тягачом и прицепным оборудованием осуществляется гидрораспределителем.
Двухосные тягачи состоят из двух полурам, шарнирно сочлененных между собой. Поворот полурам, так же как и одноосного тягача, осуществляется с помощью двух гидроцилиндров двустороннего действия. Тягачи имеют один или два ведущих моста, одну или две двигательные установки. Силовая передача к ведущим колесам аналогична рассмотренной выше. Коробки перемены передач одно- и двухосных тягачей трехступенчатые при одинаковых скоростях движения передним и задним ходом. Последнее особенно важно для машин цикличного действия, требующих особой маневренности при частом реверсировании рабочих движений (одноковшовые фронтальные погрузчики, бульдозеры и др.).
В последние годы одно- и двухосные тягачи комплектуются мотор – колесами с шинами до 3м в диаметре и шириной более 1м с автоматически изменяющимся в зависимости от дорожных условий давлением воздуха. Мотор-колесо представляет собой самостоятельный агрегат с гидравлическим или электрическим двигателем и планетарным редуктором, встроенным в колесо. Рабочие двигатели питаются от масляных насосов или генератора, приводимых в действие основным двигателем тягача. Система управления двигателями мотор – колес позволяет каждому из них сообщать различные по величине моменты и частоту вращения, а при разворотах — и направление вращения, что особенно важно при работе в сложных дорожных условиях.
§
Специализированные транспортные средства применяют в соответствии с их назначением и видом груза: для перевозки грунта, сыпучих грузов, бетонов и растворов, битума, топлива (автомобили-самосвалы, керамзитовозы, автобетоносмесители, авторастворовозы, автобитумовозы, топливовозы), порошкообразных грузов (автоцементовозы, известковозы), строительных конструкций (панелевозы, фермовозы, плитовозы, сантехкабиновозы), длинномерных грузов (трубовозы, плетевозы, металловозы), строительных грузов в контейнерах (контейнеровозы), технологического оборудования и строительных машин (тяжеловозы).
Специализированные транспортные средства представляют собой прицепы и полуприцепы к базовым автомобилям и седельным тягачам средней и большой грузоподъемности с разрешенной нагрузкой на одиночную ось 60 и 100 кН. Конструкция таких транспортных средств учитывает особенности перевозки и физические свойства грузов, сохранение качества грузов, комплексную механизацию погрузки и выгрузки. Главным параметром специализированных транспортных средств принята полная масса транспортного средства с грузом. Использование специализированного транспорта способствует дальнейшему развитию индустриальных методов строительства, снижению себестоимости перевозок, росту производительности транспортных средств.
Автомобили-самосвалы и автопоезда.Различают автомобили-самосвалы общего назначения и специальные карьерные самосвалы. Автомобили-самосвалы общего назначения изготовляют на базе серийных грузовых автомобилей (иногда с укороченной базой). Их используют для перевозки грунта из котлованов, нерудных строительных материалов от карьеров, причалов и железнодорожных станций на предприятия строительной индустрии и на сооружаемые дороги. Кроме того, автомобили-самосвалы используют для перевозки асфальтовой массы, строительного мусора и других навалочных грузов. Загрузка автомобилей-самосвалов производится обычно экскаватором, погрузчиком или из бункера. Кузов самосвалов прямоугольной, трапециевидной или корытообразной формы делается опрокидным с углом наклона до 60°. Различают самосвалы с задней разгрузкой, т.е. опрокидыванием только назад, с боковой разгрузкой на одну или обе стороны и с трехсторонней разгрузкой. Опрокидывание кузова осуществляется с помощью гидравлического подъемника, состоящего из одного или двух гидроцилиндров одностороннего действия, питаемых насосной установкой, приводимой от двигателя через коробку отбора мощности автомобиля карданными валами.
Управление опрокидыванием кузова осуществляется из кабины. При этом положения гидрораспределителя обеспечивают принудительный подъем кузова, фиксирование его на любом уровне и плавное опускание кузова под действием собственной массы, при котором происходит слив масла в бак через клапан с определенным проходным сечением. Грузоподъемность серийно выпускаемых отечественной промышленностью самосвалов составляет 10…12 т при полной массе автомобиля с грузом 19…23 т. Грузоподъемность специальных карьерных самосвалов достигает 300 т, так как они предназначены для работы вне дорог общей дорожной сети и их осевые нагрузки могут превышать действующие весовые ограничения.
При перевозке массовых грузов применяют автопоезда. Использование автопоездов вместо одиночных автомобилей-самосвалов позволяет повысить выработку на среднесписочную машину, снизить расход топлива, уменьшить число водителей. Автопоезда создают на базе автомобилей-самосвалов и унифицированных автомобильных прицепов-самосвалов и полуприцепов-самосвалов к седельным тягачам, имеющим общие конструктивные признаки. Гидроцилиндры прицепов действуют от гидравлической системы базового автомобиля. Автомобили-самосвалы, предназначенные для использования в качестве тягачей, оснащаются стандартными буксирными устройствами, а также гидро-, пневмо- и электровыводами для подключения соответствующих систем прицепов. Разгрузка кузовов самосвала и промежуточных прицепов ведется на две (боковые), а заднего — на три (боковые и заднюю) стороны. Грузоподъемность автопоезда, выполненного, например, на базе автомобиля типа КамАЗ, составляет 11 т (полная масса 19т), прицепа полной массой 16 т и полуприцепа полной массой 25 т.
Полуприцепы-панелевозы. Они предназначены для перевозки панелей, плит перекрытий на полуприцепах к седельным автомобильным тягачам. Передняя часть панелевоза опирается на седельное сцепное устройство тягача, а задняя — на одно- или двухосную тележку. В некоторых конструкциях панелевозов задняя тележка имеет поворотные оси, что способствует уменьшению габаритной полосы движения, повышению маневренности автопоезда в естественных условиях. Полуприцепы снабжают гидравлическими опорами для устойчивости их при погрузочно-разгрузочных операциях, а также автоматической сцепкой и тягачом, позволяющей работать одному тягачу с несколькими сменными полуприцепами и вести монтаж панелей «с колес», т. е. без складирования на строительной площадке. По конструкции несущего каркаса полуприцепа их разделяют на хребтовые и рамные кассетного типа.
Хребтовые панелевозы имеют каркас в виде фермы трапециевидного поперечного сечения, а панели устанавливаются в наклонном положении по обеим сторонам каркаса под углом 8…10° к вертикали. Преимущество таких панелевозов — малая погрузочная высота, удобство проведения погрузочно-разгрузочных работ. Однако эти панелевозы требуют симметричной загрузки их грузовых площадок, что трудно выполнимо при перевозке нечетного числа панелей или панелей различной массы. Кроме того, наклонное положение панелей часто приводит к возникновению трещин, сколов и других повреждений.
Рамные полуприцепы представляют собой кассету, образованную двумя продольными вертикальными плоскими фермами и поперечными связями или несущую раму с кассетой, в которой размещаются перевозимые изделия. Изделия устанавливают в вертикальном положении и удерживаются с помощью разделителей, перемещаемых вдоль кассеты, и боковых держателей. Иногда их дооборудуют дополнительными боковыми кассетами. Система крепления дает возможность перевозить панели различных размеров и конфигурации, исключает их взаимное перемещение и повреждение выступающих частей и офактуренного слоя.
ТРАНСПОРТИРУЮЩИЕ МАШИНЫ И ОБОРУДОВАНИЕ
§
Транспортирующими называют технические средства непрерывного действия для перемещения массовых сыпучих и штучных грузов по определенным линейным трассам. Их делят на конвейеры ц устройства трубопроводного транспорта. Первыми перемещают грузы (сыпучие и кусковые материалы, штучные грузы, а также пластичные смеси бетонов и растворов) путем непосредственно го механического воздействия на них тягового или транспортирующего органа. Конвейеры бывают ленточными, пластинчатыми, скребковыми, ковшовыми, винтовыми и вибрационными. Устройствами трубопроводного транспорта грузы перемещают в по токе жидкости или газа, а также в контейнерах.
Ленточными конвейерами (рис.56,а) материал перемещают как в горизонтальном, так и в наклонном направлениях бесконечной прорезиненной лентой, огибающей приводной и натяжной барабаны. Движение ленты с перемещаемым грузом, поступающим через загрузочное устройство, обеспечивается силой трения на поверхности ее контакта с приводным барабаном, вращение которому передается от электродвигателя через редуктор. Необходимое натяжение ленты обеспечивается различными конструктивными решениями, в частности, грузом, подвешенным на канате, второй конец которого за креплен на подвижной каретке натяжного барабана. Для повышения тягового усилия приводного барабана увеличивают’ угол его обхвата лентой за счет поджимного барабана, а также повышают коэффициент трения, например, путем вулканизации рабочей поверхности барабана слоем резины. Обе ветви конвейерной ленты поддерживаются от провисания роликоопорами, установленными более часто под грузовой ветвью и реже — под холостой. В зоне загрузки материала, где опоры установлены наиболее часто, они представляют собой прямые горизонтальные ролики. Такие же ролики устанавливают и на холостой ветви ленты. Остальные роликоопоры под грузовой ветвью, выполняют либо также прямыми, либо, с целью увеличения площади поперечного сечения транспортируемого материала, от которой зависит производительность конвейера — желобчатыми из одного горизонтального и двух наклонных (под углом 20… 30°) роликов.
Материал разгружают через головной барабан. В случае прямых роликоопор под грузовой ветвью возможна также промежуточная разгрузка с помощью наклонно установленного плужкового сбрасывателя. При необходимости промежуточной разгрузки на длинных конвейерах могут быть установлены так же специальные промежуточные сбрасывающие тележки.
Предельный угол наклона конвейера к горизонту зависит от подвижности транспортируемого материала и коэффициента трения материала о конвейерную ленту. Он не превышает 2/3 угла естественного откоса материала в движении (для строительных материалов не более 22°). При необходимости подъема материала на большую высоту при малом угле наклона приходится значительно увеличивать длину конвейера, что повышает стоимость установки. Этого недостатка лишены конвейеры с покрывающей лентой (рис. 57), применяемые для перемещения материалов по трассе с углом подъема до 60°. Соскальзывание матери ала предотвращается прижимной лентой (в виде тяжелого цепного мата или прорезиненной ленты с прижимными роликами), покрывающей материал и прижимающей его к основной ленте. Для транспортирования строительных материалов применяют тканевые прорезиненные ленты из нескольких слоев (прокладок) ткани (бельтинга), изготовленной из хлопчатобумажных или, чаще,
из более прочных синтетических волокон. В особых случаях в качестве прокладок используют тонкие стальные проволочные канаты при 6…8-кратном запасе прочности. Ширина ленты обычно составляет 0,4…2м, скорость ее движения 0,8…4м/с. Ширина ленты конвейеров специального назначения, являющихся транспортными органами экскаваторов и отвалообразователей непрерывного действия, землеройно-транспортных комплексов и других машин, достигает 3,2м при скорости до 8м/с. Для транспортирования крупнокусковых материалов ширина ленты должна быть не меньше наибольшего размера транспортируемых кусков. Ленточные конвейеры обладают высокой производительностью (до нескольких тысяч тонн в час), они обеспечивают значительную дальность транспортирования (до нескольких десятков километров). Для этого их обычно устанавливают каскадом — один за другим. Существенным недостатком такой схемы установки является ее недостаточная надежность, так как выход из строя какого-либо одного конвейера приводит к остановке всего каскада.
В строительстве используют стационарные и передвижные ленточные конвейеры, перемещающие грузы на сравнительно небольшие расстояния. Стационарными конвейерами оборудуют стационарные же производтва (бетонные и железобетонные заводы, склады строительных материалов и т.п.). Передвижные конвейеры, используемые обычно на строительных площадках, длиной 5…15 м оборудуют колесами для перемещения вручную или в прицепе к тягачу. Ленточные конвейеры широко используют как транспортирующие органы в конструкциях траншейных и карьерных экскаваторов непрерывного действия, бетоноукладчиков и других машин.
Пластинчатые конвейеры применяют для транспортирования материалов с острыми кромками, например для подачи крупнокускового камня в дробилки, а также для транспортирования горячих материалов, деталей и изделий на машиностроительных заводах и заводах строительных конструкций. Тяговым органом у этих конвейеров являются две бесконечные цепи, огибающие приводные и натяжные звездочки. К тяговым цепям прикреплены металлические пластины, перекрывающие друг -друга с целью исключения просыпания материала. Ширина пластинчатого настила обычно составляет 0,4…1,6м, а скорость движения — 0,01…1 м/с.
Эскалаторы (рис.59) являются разновидностью пластинчатых конвейеров. К ним относятся тоннельные для метрополитенов поэтажные для крупных общественных зданий, магазинов и др. В эскалаторе в качестве тягового органа применяют две параллельные пластинчатые тяговые цепи, а в качестве настила используют ступени высотой 0,4м и шириной 1 м (иногда 0,6м — для поэтажных эскалаторов), опирающиеся на две системы направляющих, что позволяет ступеням складываться на верхней и нижней площадках в плоский настил. В качестве поручней используют ленточные конвейеры с резинотканевой лентой специального профиля. Угол наклона эскалатора к горизонту обычно составляет 30°, высота подъема — до 45м, скорость движения 0,75…0,96м/с, пропускная способность — до 1000 чел/час.
Ковшовые конвейеры и подъемники непрерывного действия
Ковшовые конвейеры (рис.60) применяют для перемещения материалов в ковшах в вертикальном или наклонном (под большим углом) направлениях. Их называют также ковшовыми элеваторами. В качестве тягового органа 4 используют конвейерную ленту или пластинчатые цепи, огибающие приводной
6 и натяжной 1 барабаны (при цепном тяговом органе — звездочки). На тяговом органе с определенным шагом Т закреплены ковши 3. Тяговый орган вместе с ковшами и барабанами (звездочками) заключен в металлический кожух 5. Наклонные элеваторы могут быть выполненными открытыми, без кожуха. Материал загружают через загрузочный 2, а разгружают через разгрузочный 7 башмаки.
Различают быстроходные (скорость движения тягового органа 1,25…2,5м/с) и тихоходные (скорость 0,4…1м/с) элеваторы. Первые применяют для транспортирования порошкообразных, а также мелко- и среднекусковых материалов, а вторые — для среднекусковых абразивных, крупнокусковых и плохо подвижных материалов. Для транспортирования сыпучих малоподвижных и подвижных материалов применяют соответственно мелкие или глубокие ковши, располагая ихна тяговом органе с шагом 0,3..0,6м. Кусковые материалы перемещают остроугольными ковшами 1, располагая их вплотную друг к другу. Загружаются ковши быстроходных элеваторов при прохождении ими загрузочного башмака зачерпыванием, а разгружаются выбрасыванием материала под действием центробежных сил при огибании приводного барабана (звездочки). Ковши тихоходных элеваторов загружаются путем засыпания в них материала, а разгружаются под действием гравитационных сил. При этом материал скатывается по передней стенке впереди идущего ковша, вследствие чего снижается сила его удара о разгрузочный башмак.
Высота подъема материала составляет до 35м, производительность (по объему материала) до 100м/ч. Преимущественная область применения — заполнение высоких хранилищ — силосов и бункеров.
Подъемники непрерывного действия для штучных грузов (рис.61) являются разновидностью ковшовых элеваторов. В таких устройствах к тяговым цепям подвешивают площадки-люльки (люлечные элеваторы), что позволяет не только поднимать, но и опускать груз. При жестком креплении полок на тяговых цепях элеватор устанавливают наклонно и используют преимущественно для подъема штучных грузов, подаваемых на полки самотеком и также самотеком скатывающихся с них. Такие элеваторы используют в основном как погрузочно-разгрузочные устройства. Элеваторы применяют и как пассажирские подъемники непрерывного действия. Для свободного прохождения через верхние и нижние звездочки кабины для пассажиров подвешивают шарнирно к двум цепям. Пассажирские элеваторы (патерностеры) применяют в административных зданиях при небольших рассредоточенных пассажирских потоках. Скорость движения кабины не превышает 0,3м/с, что позволяет пассажирам заходить в кабину и выходить из нее на ходу.
Винтовые и вибрационные конвейеры
Винтовые конвейеры применяют для горизонтального или наклонного (под углом до 20°) транспортирования сыпучих, кусковых и тестообразных материалов на расстояние 30…40м. Конвейер представляет собой желоб 4 полукруглой формы, внутри которого в подшипниках 5 вращается винт 3,
приводимый электродвигателем 7 через редуктор 2. При вращении винта мате риал перемещается от загрузочного 6 к разгрузочному отверстию 7, перекрываемому задвижкой. Форма винта зависит от вида транспортируемого материала. Для хорошо сыпучих материалов (цемента, мела, песка, гипса, шлака, порошковой извести) применяют сплошные винты.
Для кусковых материалов (крупного гравия, известняка, негранулированного шлака) используют ленточные и лопастные винты.
Тестообразные, слежавшиеся и влажные материалы (мокрую глину, бетонные смеси, цементные растворы) перемещают фасонными и лопастными винтами.
Диаметры винтов стандартизованы и составляют 0,15…0,6м, производительность их в среднем 20…40м/ч, при больших размерах винта — до 100м/ч.
Производительность наклонных конвейеров уменьшается из-за снижения скорости v вследствие гравитационного сопротивления движению. Так, при углах наклона 5, 10 и 20° это снижение составляет 10, 20 и 35% соответственно.
Реже применяют вертикальные винтовые конвейеры, в которые материал поступает от горизонтального конвейера, создающего подпор.
В вибрационном конвейере (рис.64), загруженному транспортируемым материалом желобу сообщаются несимметричные колебания так, что средняя скорость его перемещения в одном направлении значительно превышает среднюю скорость в противоположном направлении. При движении с меньшей скоростью желоб перемещается из положения I в положение // вместе с находящимся на нем материалом. При резком возвращении желоба в исходное положение из-за повышенной скорости уменьшаются силы трения между желобом и материалом, вследствие чего, а также из-за инерционности материала он отстает от желоба, оставаясь на достигнутом ранее месте или незначительно смещаясь в направлении движения желоба и совершая таким образом скачкообразное движение по желобу за каждый цикл колебаний. Матердалы можно перемещать по горизонтали, а также наклонно вверх и вниз. Источником колебаний служат электромагнитные возбудители или вибраторы с механическим приводом (эксцентриковые, кривошипно-шатунные). В строительстве вибрационные конвейеры используют для транспортирования материалов на небольшие расстояния, например, при дозировании инертных материалов в производстве бетонных смесей или строительных растворов. Принцип виброконвейера используется, в частности, в работе виброжелобов для подачи бетонной смеси к местам ее укладки.
§
Пневматическими установками перемещают сыпучие грузы по трубам с помощью сжатого или разреженного воздуха. Их применяют для погрузки, разгрузки и перемещения цемента, песка, извести, опилок и т.п. По принципу действия различают установки всасывающего и нагнетательного действия.
В установках всасывающего действия (рис.65,а) транспортируемый материал поступает во всасывающий трубопровод 2 вследствие разрежения в нем воздуха, создаваемого вакуум-насосом 8. С помощью сопел 1 возможен забор материала одновременно из нескольких мест.
Из всасывающего трубопровода смесь воздуха с транспортируемым материалом поступает в осадительную камеру 3, где, вследствие резкого снижения скорости потока из-за расширения выходного сечения, более тяжелые частицы материала оседают и через шлюзовой затвор 4 высыпаются в бункер 5, а частично очищенный воздух поступает в фильтр 6, работающий по тому же принципу осадительной камеры, где он очищается дополнительно и, пройдя через вакуум-насос 8, по трубопроводу 7 выбрасывается в атмосферу.
Вакуумный эффект в таких установках снижается по мере удаления от вакуум-насоса. Перепад давлений на участке сопло—насос составляет 40…80кПа,.в связи с чем установки всасывающего действия способны транспортировать материалы на небольшие расстояния при малом перепаде высоты. Существенным недостатком таких установок является небольшая долговечность вакуум-насоса, внутренние полости которого подвергаются абразивному изнашиванию при недостаточной очистке выбрасываемого в атмосферу воздуха.
В установках нагнетательного действия (рис.65,б) материал перемещается в потоке воздуха под действием избыточного давления, создаваемого компрессором 10, который засасывает воздух из атмосферы через воздухоприемник 9 и подает его в воздухосборник (ресивер) 17, откуда он поступает в транспортный трубопровод 14. Материал подается из загрузочного устройства 13 через затвор 12 Далее транспортная схема аналогична рассмотренной выше: в осадительной камере 15 происходит отделение материала от воздуха, который через затвор 16 выпадает в бункер 17, а воздух, очистившись от примесей фильтром 18, выбрасывается в атмосферу. Нагнетательные системы применяют для транспортирования материала по разветвленному трубопроводу из одного места в несколько мест на значительные расстояния при большом перепаде высот. Давление воздуха в них 0,2…0,8мПа.
Всасывающая и нагнетательная системы могут быть объединены в одну пневмотранспортную установку, например, при разгрузке вагонов с последующим транспортированием материала на дальние расстояния. Соединительным элементом в этом случае может быть конвейер любого типа, например, ленточный, на который материал разгружается из бункера 5 всасывающей части установки и которым он загружается в загрузочное устройство 13 нагнетательной части.
Преимущества пневматического транспортирования заключаются в герметичности установки, исключающей пыление и загрязнение материала, в полной механизации процесса загрузки и разгрузки материала, в компактности оборудования и возможности перемещения материала по трассе любой конфигурации протяженностью до 2 км при большом перепаде по высоте и большой производительности (200… 300т/ч и более). Недостатком является высокий удельный расход энергии (в 3—6 раз больше, чем для конвейеров), быстрое изнашивание деталей оборудования при перемещении абразивных материалов.
Автоцементовозы (рис.66) применяют для доставки цемента с цементных заводов и элеваторов на стройки и предприятия строительной индустрии. Автоцементовоз представляет собой цистерну-полуприцеп 2 к автомобильному седельному тягачу, установленную под углом 6…8° в сторону разгрузки, и оснащенную системой загрузки и выгрузки цемента. Во время стоянки без тягача цистерна-полуприцеп опирается на выдвижные опоры 3. Внутри цистерна оборудована аэролотком 15, представляющим собой желобы, на которые натянута пористая ткань.
Загрузка осуществляется через люк 1 и самостоятельно. Принцип самозагрузки основан на действии установки всасывающего типа, как на рис.16,б. Оборудование для загрузки состоит из заборного сопла 6 с гибким шлангом 7, распределительной трубы 9, вакуум-насоса 4 и фильтров 5. Вакуум-насос приводится в действие от двигателя автомобиля и может работать в режиме насоса при загрузке и в режиме компрессора при разгрузке. Воздух очищается от цемента в фильтрах 11 и 5. В цистерне установлены сигнализатор уровня цемента 10 и манометр 12. Воздушная система снабжена обратными 13 и 14 и предохранительным 16 клапанами. При разгрузке через аэролоток в цистерну от насоса-компрессора подается сжатый воздух. При достижении рабочего давления 0,15…0,20мПа открывается разгрузочный кран 8, к шаровой головке которого присоединяется шланг. Насыщенный воздухом цемент приобретает подвижность и подается в склады хранения на высоту до 25м. Производительность выпускаемых автоцементовозов 3, 5, 8, 13 и 22т.
Погрузочно-разгрузочные машины
Погрузочно-разгрузочные машины в строительстве применяют для погрузки штучных и сыпучих грузов, разгрузки их с транспортных средств, а также для перемещения и складирования в пределах строительной площадки. Они представляют собой преимущественно самоходные колесные или гусеничные подъемно-транспортные машины.
По принципу выполнения рабочих операций Погрузочно-разгрузочные машины делят на машины цикличного и непрерывного действия. Первые являются универсальными и могут применяться в различных условиях благодаря наличию многих видов рабочего оборудования; вторые применяют на объектах с большим объемом работ по погрузке, перемещению и разгрузке сыпучих строительных материалов, а также там, где рабочий процесс должен быть непрерывным.
В зависимости от назначения погрузочно-разгрузочные машины разделяют на погрузчики для штучных грузов — автопогрузчики и для сыпучих грузов — одно- и многоковшовые погрузчики.
Для разгрузки материалов с железнодорожного подвижного состава используют разгрузчики узкоспециального назначения различных конструкций, например, со скребковым, бурофрезерным, всасывающим рабочими органами.
Автопогрузчики. Основным видом рабочего оборудования автопогрузчиков является вилочный захват, который подводят под груз или штабель из отдельных мелких грузов, установленный на подставках. С помощью вилочных погрузчиков перегружают и транспортируют штучные железобетонные изделия, поддоны с кирпичом, оборудование, длинномерные пиломатериалы, профильный металл.
Вилочные автопогрузчики изготовляют на базе автомобильных узлов (мостов, коробок передач, рулевого управления, тормозных устройств и др.) с двигателями внутреннего сгорания или с электродвигателями, работающими от аккумулятора. Все агрегаты (рис.67,а) монтируются на ходовой раме, которая опирается на передний 12 и задний 11 мосты погрузчика.
В отличие от обычного автомобиля у вилочных погрузчиков двигатель и управляемые колеса располагаются сзади, а ведущий мост со сдвоенными пневмоколесами — спереди. Это обусловлено тем, что передняя часть погрузчика воспринимает нагрузку от рабочего оборудования и груза. Ходовое оборудование погрузчиков приспособлено для работы на площадках с твердым покрытием. Заднее расположение управляемых колес создает погрузчику хорошую маневренность.
Подъемная, часть погрузчика — грузоподъемник (рис.67,б) состоит из шарнирно укрепленной на раме погрузчика основной вертикальной рамы 2, выдвижной внутренней рамы 4 и грузовой каретки 8 с вилочным захватом 5. Для надежного захвата груза основная рама подъемника может отклоняться вперед от вертикальной плоскости на угол 3…4°, а для обеспечения устойчивости в транспортном положении—на 12…15° назад, что осуществляется с помощью двух гидравлических цилиндров. Выдвижная рама перемещается по направляющим основной рамы гидравлическим цилиндром 1 Корпус гидроцилиндра опирается на нижнюю поперечину основной рамы, а поршень 3 и шток 10 шарнирно связаны с верхней балкой выдвижной рамы 6. Одновременно по направляющим рамы перемещается грузовая каретка с помощью обратного цепного полиспаста. Последний образован двумя пластинчатыми цепями 9, перекинутыми через звездочки 7, установленными на верхней балке подвижной рамы 6. Концы цепей закреплены на основной раме и на грузовой каретке. Благодаря этому грузовая каретка движется с удвоенной скоростью и проходит путь в два раза больший, чем ход выдвижения штока гидроцилиндра.
Поступательное движение штоков гидроцилиндров рабочего оборудования вилочного автопогрузчика создается давлением жидкости насосов, приводимых во вращение двигателем автопогрузчика. Для уменьшения усилий управления в систему управляемых колес подключен специальный гидроусилитель рулевого управления. Для привода гидроусилителя рулевого управления установлен насос. Управление гидроусилителем сблокировано с рулевой колонкой и осуществляется автоматически.
Вилочные погрузчики выпускаются грузоподъемностью 3…5т с высотой подъема груза до 6м и скоростью перемещения с грузом до 20 и без груза до 40км/ч. Автопогрузчики оборудуются различными съемными видами рабочего оборудования — грейфером (схватом) для бревен, ковшом для сыпучих грузов, крановой стрелой и другими приспособлениями, расширяющими область их применения. Так, для работы с длинномерными грузами, с которыми обычный погрузчик не приспособлен работать, применяют автопогрузчики с боковым расположением грузоподъемника. Грузоподъемник поворачивается относительно продольной оси, а длинномерный груз вилочным захватом укладывается на боковые кронштейны вдоль машин и в таком положении транспортируется в узких проходах складов.
Одноковшовые погрузчики. Основным рабочим органом одноковшового погрузчика является ковш, используемый для разработки, погрузки и перемещения сыпучих мелкокусковых материалов и грунтов I к II категорий. Главным параметром одноковшовых погрузчиков является грузоподъемность. По грузоподъемности одноковшовые погрузчики разделяют на малогабаритные (до 0,5 т), легкие (0,6… 2,0 т), средние (2,0…4,0 т), тяжелые (4,0… …10 т) и большегрузные (более 10 т).
В зависимости от ходового оборудования погрузчики могут быть гусеничными и пневмоколесными. Гусеничные погрузчики имеют высокую проходимость и развивают большее напорное усилие, пневмоколесные — большую маневренность и высокие транспортные скорости. В качестве базовых машин для погрузчиков применяют специальные пневмоколесные шасси, гусеничные и колесные промышленные тракторы погрузочных модификаций или тракторы общего назначения. Специальные пневмоколесные шасси состоят из двух шарнирно соединенных между собой полурам. Шарнирное сочленение полурам позволяет осуществить погрузку-разгрузку с минимальным маневрированием за счет взаимного поворота полурам на угол до 40° в плане в обе стороны от продольной оси машины.
Погрузочные модификации тракторов промышленного типа изготовляют с учетом установки на них погрузочного оборудования и работы с ним. Его располагают на базовой машине спереди или сзади относительно двигателя. Силовые передачи гусеничных и колесных тягачей, а также специальных шасси выполняют гидромеханическими с трехскоростной коробкой перемены передач (три скорости вперед и три одинаковые скорости назад). Такая передача приспособлена для частого реверсирования движений при автоматическом переключении передач и наиболее полно отвечает рабочему режиму одноковшовых погрузчиков.
По способу разгрузки рабочего органа различают погрузчики: с передней разгрузкой (фронтальные погрузчики), с боковой разгрузкой (полуповоротные погрузчики), с задней разгрузкой (перекидной тип погрузчика). Наиболее распространены в строительстве фронтальные и полуповоротные погрузчики на пневмо-колесном и гусеничном ходу с объемным гидроприводом погрузочного оборудования.
Фронтальные погрузчики. Они обеспечивают разгрузку ковша со стороны разработки материала. Погрузочное оборудование погрузчика шарнирно ‘крепится к портальной раме 6, жестко установленной на основной раме базовой машины (рис.68.). Оно состоит из рабочего органа, стрелы, рычажного механизма и гидроцилиндров двустороннего действия. Рабочий орган погрузчика — ковш /,установлен на стреле 4 и управляется рычажным механизмом, состоящим из двух пар коромысел 3 и поворотных тяг 2, приводимых в движение двумя гидроцилиндрами 5 поворота ковша. Подъем и опускание стрелы осуществляются двумя гидроцилиндрами 7. Гидравлический привод рабочего оборудования позволяет плавно изменять скорости в широких пределах и надежно предохранять его от перегрузок.
Рабочий процесс фронтального погрузчика, оборудованного ковшом, состоит из следующих операций: перемещение погрузчика к месту набора материала с одновременным опусканием ковша, внедрение ковша в материал напорным усилием машины, подъем ковша со стрелой, транспортировка материала к месту разгрузки и разгрузки ковша опрокидыванием.
Полуповоротные погрузчики (рис.69.). В отличие от фронтальных эти машины обеспечивают разгрузку ковша и сменных рабочих органов впереди и на обе стороны на угол до 90° от продольной оси. Это сокращает время на развороты и позволяет использовать их для работы в стесненных условиях. Конструктивно полуповоротные погрузчики отличаются от фронтальных тем, что погрузочное оборудование монтируется на поворотной платформе 1, которая, в свою очередь, через опорно-поворотное устройство 2 опирается на ходовую раму 3 базовой машины. Вращательное движение поворотная платформа получает с помощью двух горизонтально расположенных гидроцилиндров 4, штоки которых соединены между собой пластинчатой цепью 5, огибающей звездочку 6 поворотной платформы. Кроме основного ковша одноковшовые погрузчики оснащаются многими видами сменного и навесного оборудования — ковшами увеличенной и уменьшенной вместимости, грейферными двухчелюстными ковшами, ковшами с боковой разгрузкой, поворотными захватами, используемыми для погрузки в транспортные средства и складирования штучных и длинномерных грузов, лесоматериалов, установки столбов и другим оборудованием. Некоторые виды такого сменного и навесного оборудования представлены на рис.70, 71. Техническая производительность одноковшовых погрузчиков (м3/ч) определяется с учетом физических свойств разрабатываемого материала и условий работы.
Для достижения максимальной технической производительности необходимо анализировать условия работы и в том числе использовать оптимальную схему организации работ, соответствующие виды сменного рабочего оборудования (например, ковши повышенной или уменьшенной вместимости), способствующие максимальному использованию тягового усилия базового трактора или тягача. Благодаря хорошей транспортирующей способности одноковшовые погрузчики успешно конкурируют с одноковшовыми экскаваторами, работающими в транспорт, и по некоторым технико-экономическим показателям (производительности труда на одного человека в смену, стоимости единицы продукции, материалоемкости и энергоемкости работ) превосходят их. Мощность силовой установки современных одноковшовых погрузчиков достигает 900 кВт при вместимости основного ковша 10 м3.
Многоковшовые погрузчики. Они относятся к машинам непрерывного действия. Их применяют для погрузки в транспортные средства сыпучих и мелкокусковых материалов (песка, гравия, щебня, шлака, сколотого льда и снега), а также для засыпки траншей грунтом. Многоковшовые погрузчики монтируют на самоходном гусеничном или пневмоколесном шасси, в конструкции которого используются детали и узлы тракторов и автомобилей. По конструкции рабочего органа различают погрузчики шнекоковшовые, роторные, дисковые и с подгребающими лапами. Шнекоковшовый рабочий орган имеет шнековый питатель и ковшовый элеватор для подачи материала на ленточный конвейер. Роторные погрузчики разрабатывают материал шаровыми или ковшовыми фрезами. В дисковых погрузчиках материал подается двумя дисками, вращающимися во встречном направлении.
Подгребающие лапы подают материал на конвейер благодаря специальной кинематике движения. Главным параметром многоковшовых погрузчиков является производительность. Их выпускают производительностью 40, 80, 160, 250 м3/ч с высотой погрузки 2,4…4,2 м.
Многоковшовый погрузчик с шнекоковшовым органом (рис.72.) состоит из следующих основных узлов: пневмоколесного шасси 1 с обеими ведущими осями, наклонного ковшового конвейера 3 с винтовым (шнековым) питателем 4, ленточного поворотного в плане и в вертикальной плоскости конвейера 2. Для лучшей подачи материала к питателю на раме ковшового конвейера установлен отвал 5. Ковшовый конвейер устанавливается в рабочее и транспортное положения с помощью двух гидроцилиндров 6. При поступательном движении погрузчика материал винтовым питателем подается в непрерывно вращающийся ковшовый конвейер и далее через приемное устройство и ленточный конвейер в транспорт. Поворотные движения ленточного конвейера позволяют изменять высоту загрузки, а также загружать подвижной состав по обе стороны от продольной оси погрузчика. Поступательная скорость погрузчика выбирается в зависимости от высоты штабеля материала и производительности. Все основные механизмы, кроме привода ковшового конвейера, приводятся в действие с помощью гидроцилиндров двустороннего действия, работающих от гидросистемы погрузчика.
Машины с загребающими лапами (рис.73.), обычно используемые как снегоуборочные, применяют также для погрузки мелко- и среднекусковых, преимущественно малоабразивных, материалов, например угля.
Загребающая лапа 6 является составной частью шарнирного четырехзвенника, включающего также кривошип 7 и тягу 8, смонтированные на лотке 9. При вращении кривошипов, приводимых в движение через расположенный под лотком карданный вал, и непрерывной подаче машины на штабель лапы поочередно загребают материал, и подают его на скребковый конвейер 10. Для работы с абразивными строительными материалами эти машины непригодны из-за быстрого изнашивания шарнирных узлов четырехзвенников.
§
В строительстве грузоподъемные машины используют для перемещения строительных материалов, монтажа строительных конструкций, погрузочно-разгрузочных операций на складах строительных материалов, монтажа и обслуживания технологического оборудования в процессе его эксплуатации.
По характеру работы — это машины цикличного действия. Главным параметром грузоподъемных машин является грузоподъемность, под которой понимают наибольшую допустимую массу груза, включая массу съемного грузозахватного приспособления, на подъем которой она рассчитана. Грузоподъемность выражают в единицах массы (кг, т).
Кроме того, грузоподъемные машины характеризуются зоной обслуживания, определяемой пролетом или вылетом груза, высотой подъема груза, скоростями рабочих движений, массой, показателями потребляемой мощности и опорными нагрузками. Грузоподъемность некоторых грузоподъемных машин, например стреловых кранов, изменяется в зависимости от вылета. Вылетом называется расстояние от оси вращения поворотной части крана до оси грузоподъемного органа. Поэтому такие краны характеризуют грузовым моментом (кН·м), т.е. произведением силы тяжести груза на вылет груза, которое является, примерно, постоянным.
По назначению грузоподъемные машины делят на: вспомогательные, строительные подъемники, строительные краны, специальные краны-трубоукладчики.
Вспомогательные грузоподъемные машины. К ним относятся домкраты, строительные лебедки, подвесные лебедки (тали и электротали). Они состоят преимущественно из одного механизма и осуществляют вертикальное (домкраты, строительные лебедки, тали) или горизонтальное (тяговые лебедки) по рельсовым путям или направляющим перемещение грузов. В них используется ручной и механический приводы.
Строительные подъемники. Этими машинами перемещают по вертикали грузы (грузовые) или людей (грузопассажирские) в кабинах или на площадках, движущихся в жестких направляющих.
Строительные краны. Это наиболее сложные и универсальные грузоподъемные машины для перемещения штучных грузов, строительных конструкций и технологического оборудования по пространственной траектории различной протяженности и конфигурации. Они различны по конструктивному исполнению, изготовляются в виде консольных (стреловых) или пролетных конструкций, стационарными или передвижными и соответственно различными зонами обслуживания. К консольным кранам относятся стационарные мачтовые и мачтово-стреловые краны, башенные, стреловые самоходные краны и специальные краны-трубоукладчики; к пролетным — мостовые, козловые и кабельные краны. Стационарные стреловые краны перемещают грузы в пределах круга или сектора, охватываемого стрелой. Башенные стреловые поворотные краны передвигаются по рельсовым путям и перемещают груз в пределах прямоугольника, длина которого равна длине путей, а ширина — двойному вылету крана. Наличие башни позволяет поднимать и монтировать крупно объемные конструкции. Стреловые самоходные краны (автомобильные, пневмоколесные, гусеничные, на специальных шасси автомобильного типа, тракторные) перемещаются по земле и обслуживают площадь любой конфигурации.
Пролетные козловые и мостовые краны передвигаются по специальным подкрановым путям и обслуживают зону в виде прямоугольника. Кабельные краны перемещают грузы вдоль каната, натянутого между опорами. В зависимости от подвижности опор зона их обслуживания — линия, сектор или прямоугольник.
На металлических конструкциях кранов устанавливают несколько крановых механизмов. Типовыми крановыми механизмами являются: механизм подъема груза, включающий грузовую лебедку, полиспаст и грузозахватный орган; механизм передвижения крана или какой-либо его части; механизм вращения поворотной части; механизм изменения вылета.
Для привода механизмов кранов применяют двигатели внутреннего сгорания, гидравлические, электрические двигатели переменного и постоянного тока. Для всех крановых механизмов характерен повторно-кратковременный режим работы (чередование работы и пауз), характеризуемый относительной продолжительностью включения (ПВ). Под ПВ понимают отношение суммарного времени работы механизма в заданный период (%) к продолжительности этого периода, принимаемого для механизмов равным 1 ч. Правилами Госгортехнадзора для грузоподъемных кранов установлены конкретные ориентиры для отнесения их к тому или иному режиму работы
Специальные краны-трубоукладчики. Такие краны снабжаются боковой стрелой, установленной на тракторах трубоукладочных модификаций, благодаря чему они способны выполнять операции по разгрузке труб и плетей, подъему и опусканию их в траншею, передвижению с грузом вдоль трассы и другие операции при сооружении газо- и нефтепроводов.
§
Мачтовые и мачтово-стреловые краны являются стационарными кранами, что ограничивает область их применения. Их используют главным образом для монтажа сборных конструкций и технологического оборудования крупных строительных объектов.
Мачтовые краны. У мачтового крана поворотная мачта опирается на раму-фундамент и дополнительно прикрепляется к зданию или расчаливается вантами. На мачте устанавливается поворотная стрела – укосина. Для подъема груза используют имеющуюся в распоряжении лебедку, к которой в зависимости от требуемой грузоподъемности подбирают полиспаст.
Мачтово-стреловые краны по виду крепления мачты делятся на вантовые и подкосные.
Вантовые мачтово-стреловые краны. Такой кран (рис.74) состоит из мачты 9, стрелы 8, грузового 6 и стрелового 3 полиспастов, опорной рамы 11, лебедок 14 и вант 2. Стрела крепится шарнирно к мачте у ее нижнего основания и вместе с ней может поворачиваться вокруг вертикальной оси с помощью поворотного круга 10 на 360°. Механизм вращения мачты и стрелы – канатный. Мачта опирается внизу на специальную шаровую пяту 15, а вверху мачту через неподвижную опору / раскрепляют четырьмя-восемью вантами (в зависимости от грузоподъемности), расположенными обычно под углом 30° к горизонту. Ванты натягивают и удерживают в натяжении в процессе эксплуатации ручными лебедками или стяжными муфтами, прикрепляемыми к якорям. Стрела стрелоподъемным полиспастом связана с оголовком мачты. Концевые ветви стрелового и грузового полиспастов через отводные блоки 12, 13 вводятся внутрь мачты и через отверстие в пяте стрелы выводятся на барабаны электрореверсивных лебедок 14. Для увеличения вылета основной стрелы и высоты подъема груза ее оборудуют управляемым с помощью полиспаста 7 гуськом 4 и вторым механизмом подъема груза и полиспастом 5 меньшей грузоподъемности.
Подкосные мачтово-стреловые краны опираются на основание 1 (рис.75). Стрела 7 удерживается в наклонном положении стрелоподъемным полиспастом 6 шарнирным соединением 5 с жесткой пространственной конструкцией, образованной мачтой 4, горизонтальными балками 2 и подкосами 3. Мачта вместе со стрелой опирается на поворотный круг 9 и может поворачиваться относительно подкосов и горизонтальных балок на угол до 240°. Отсутствие вант у подкосных кранов позволяет делать стрелу в 1,5…2 раза длиннее мачты. Схема канатоведения грузового 8 и стрелоподъемного 6 полиспастов, конструкция опор, приводы механизма подъема груза, изменения вылета стрелы и вращения крана подобны описанным ранее. Подкосные мачтово-стреловые краны изготовляются грузоподъемностью 5…20 т с одинаковыми значениями ее на всех вылетах.
Расчет натяжений в вантах (рис.75). При действии на мачту натяжения стрелового полиспаста одна часть вант разгружается, провисание их увеличивается, другая часть вант дополнительно нагружается, в результате чего мачта наклоняется. Наклону мачты не препятствует шаровая опора. При большом числе вант задача является статически неопределимой. В приближенных расчетах предполагают, что вся нагрузка Sв (Н) воспринимается одной вантой, находящейся в плоскости стрелы, ее определяют из суммы моментов относительно опоры
В действительности мачта удерживается несколькими вантами с различным натяжением. Натяжение наиболее нагруженной ванты Sв=Sв·k1, где k1-коэффициент, зависящий от числа вант; его принимают при 4 вантах равным 1,0; при 6-0,67; при 8-0,5; при 10-0,4; при 12 – 0,3. Стальные проволочные канаты для вант подбирают по разрывному усилию при запасе прочности не менее 3,5.
Башенные краны
Башенный кран – это грузоподъемная машина со стрелой, закрепленной в верхней части вертикальной башни и выполняющая работу по перемещению и монтажу конструкций за счет сочетания рабочих движений: подъема и опускания груза, изменения вылета, передвижения самого крана по рельсам и поворота стрелы с грузом. Большая обслуживаемая рабочая зона, определяемая длиной подкрановых рельсовых путей и двойным вылетом груза, в сочетании с большим под стреловым пространством обусловили широкое использование башенных кранов как основной грузоподъемной машины для выполнения строительно-монтажных работ в гражданском, промышленном и энергетическом строительстве.
Типы и параметры башенных кранов определяются их технологическим назначением. Параметры башенных кранов регламентируются ГОСТами. Главным параметром башенного крана является грузоподъемность, т.е. наибольшая масса груза на соответствующем вылете. Поскольку грузоподъемность стреловых кранов переменна, ее характеризуют грузовым моментом. К основным параметрам относятся минимальный и максимальный вылеты, высота подъема и глубина опускания крюка, скорости рабочих движений, габариты, масса крана, показатели мощности и опорные нагрузки.
В жилищном и гражданском строительстве применяют краны грузоподъемностью 3…10 т с вылетом до 25 м и высотой подъема крюка до 50 м. Краны для высотного строительства имеют грузоподъемность от 6,3 до 12,5 т, вылет до 45 м и высоту подъема крюка до 150 м. В промышленном строительстве, например, при сооружении корпусов главных зданий и монтаже технологического оборудования электростанций применяют специальные монтажные краны грузоподъемностью до 80 т с грузовым моментом до 15000 кН·м, вылетом 25…45 м, высотой подъема 50…80 м.
Применительно к конкретным условиям строительства на основе базовых моделей изготовляются краны различных исполнений (с укороченными или удлиненными стрелами и башнями, краны-погрузчики, для работы в различных климатических условиях и др.). Каждая базовая модель крана или ее исполнение снабжается грузовысотной характеристикой, представляющей зависимость грузоподъемности от высоты подъема и вылета, используемой при выборе крана или его оборудования при эксплуатации.
Башенные краны разделяются на передвижные по рельсовым путям, стационарные (приставные), прикрепленные к возводимому сооружению, и самоподъемные, устанавливаемые на каркасные конструкции зданий и перемещаемые по нему в вертикальном направлении. По способу изменения вылета крюка различают башенные краны с подъемной стрелой и краны с горизонтальной балочной стрелой. По типу башен башенные краны выпускают с поворотной и неповоротной башней.
Базовые модели башенных кранов обозначаются буквами КБ (кран “башенный) и цифрами (рис.76.). Первая цифра указывает размерную группу по грузовому моменту, две вторые – порядковый номер базовой
модели, имеющей поворотную или неповоротную башню, четвертая – номер исполнения, отличающийся от базовой модели, например длиной стрелы, высотой подъема, величиной максимальной грузоподъемности. После цифр может указываться обозначение очередной модернизации (А, Б, В) и климатическое исполнение для холодного, тропического и тропического влажного климата (ХЛ,Т,ТВ).
Большинство моделей башенных кранов выполняются по единой конструктивной схеме с максимальным использованием унифицированных узлов и механизмов, а также устройствами для плавного пуска и торможения механизмов и посадки грузов с малой скоростью.
В последние годы получило развитие наиболее прогрессивное направление производства башенных кранов – модульная система, включающая проектирование, изготовление и эксплуатацию кранов. Сущность модульной системы состоит в создании семейства башенных кранов разнообразных исполнений на базе узкого ряда базовых унифицированных узлов – модулей (как механизмов, так и металлоконструкций). Модульная система способствует снижению затрат на проектирование, развитию специализации производства и, как следствие, снижению себестоимости изготовления и повышению надежности модулей, уменьшению эксплуатационных расходов на техническое обслуживание и ремонт.
Наибольшее применение в строительстве получили башенные краны с поворотной башней (платформой). По сравнению с кранами с неповоротной башней они имеют меньшую массу, так как расположение механизмов и балласта в нижней части крана понижает положение его центра тяжести и точки приложения равнодействующей ветровой нагрузки. Кроме того, они отличаются малыми сроками монтажа и демонтажа, удобством транспортирования и технического обслуживания.
Башенные краны с поворотной башней. Башня крана 2 (рис.77) крепится к поворотной платформе 4, которая через опорно-поворотное устройство 6 опирается на ходовую часть 5. На поворотной платформе размещаются: противовес 7, грузовая 8, стреловая 9 лебедки и механизм вращения поворотной платформы 3. Стрела 1 крепится шарнирно к башне и удерживается канатными тягами 12, которые через направляющие блоки соединены с подвижной обоймой стрелового полиспаста 10. Подъем и опускание груза выполняются грузовым полиспастом 13 с помощью грузовой лебедки и крюковой подвески. Управление краном ведется из кабины 11. В башенных кранах для механизма подъема груза в зависимости от грузоподъемности применяют одиночные и сдвоенные полиспасты двух, трех, четырех и большей кратности.
Крюковые подвески состоят из грузового крюка, траверсы, двух боковых щек, осей с установленными на них блоками. Грузовой крюк крепится в траверсе на упорном подшипнике, благодаря чему он может свободно поворачиваться и предохранять грузовой канат от закручивания. Число блоков в подвеске определяется кратностью полиспаста, а также необходимостью изменения ее для повышения грузоподъемности крана без увеличения мощности грузовой лебедки. В некоторых конструкциях кранов с большой высотой подъема груза применяют подвески с разнесенными блоками (рис.78, поз.15} для предотвращения закручивания каната. Изменение вылета груза осуществляется наклоном стрелы (рис.11,а) или перемещением каретки с грузом вдоль горизонтальной стрелы (рис.77,б). При оборудовании крана горизонтальной балочной стрелой грузовая каретка перемещается вдоль стрелы с помощью тяговой электрореверсивной лебедки 14, расположенной на стреле или на поворотной платформе. Тяговый канат
навивается на барабан лебедки, а два свободных его конца огибают направляющие блоки и крепятся с разных сторон к каретке 15 (рис.77,д).
На каретке размещены блоки грузового каната. При перемещении каретки блоки обкатываются по грузовому канату и груз, не изменяя положения по высоте, перемещается вдоль стрелы (рис.77,е). При необходимости изменения вылета груза наклоном стрелы грузовая каретка фиксируется на стреле.
Высота подъема груза при горизонтальной стреле ниже, чем при наклонной. Однако горизонтальное перемещение груза вдоль стрелы требует меньшей энергии, чем перемещение этого груза подъемом всей стрелы и одновременно упрощает операции по наводке монтажного элемента на место монтажа. У кранов с наклонной стрелой при изменении вылета груз одновременно изменяет свое положение и по высоте. Для устранения этого недостатка необходимо обеспечить горизонтальное перемещение груза при изменении вылета стрелы.
На рис.77,б, в представлена схема запасовки (канатоведения) грузового каната при четырех- и двухкратном полиспасте. Один конец грузового каната закреплен на грузовом барабане, а второй – на стреловом барабане меньшего диаметра в обратном по отношению к стреловому направлении. При изменении вылета крюка грузовой канат будет сматываться (или наматываться) со стрелового барабана при неизменном по высоте положении крюка. Балочная стрела с грузовой кареткой может быть установлена и в наклонном с переломом в 30° положении. Грузовая каретка по приведенной на рис.77,ж схеме может перемещаться по наклонной стреле при сохранении горизонтального хода груза и увеличенной высоте его подъема. Однако изготовление кранов с нижним расположением опорно-поворотного устройства, у которых вращается весь кран, кроме его ходовой части, при большой грузоподъемности с большой высотой подъема груза приводит к значительному увеличению всей массы крана. Поэтому башенные краны грузоподъемностью более 10 т изготовляются с неповоротной башней и вращающейся только верхней частью крана.
Кран с неповоротной башней и горизонтальной стрелой (рис.78). Башня крана 1 через опорную часть – раму 2 или портал – установлена на ходовые тележки 3, которые перемещают кран по рельсовому пути. На опорной части расположен балласт 4, обеспечивающий устойчивость крана в рабочем и нерабочем состояниях. Поворотная головка 12 опирается на верхнюю секцию башни через опорно-поворотное устройство 6. Стрела 14 и противовесная консоль 7 шарнирно закреплены на поворотной головке и удерживаются растяжками 10. На противовесной консоли размещены грузовая лебедка 9, лебедка передвижения противовеса 11 и противовес 8, уравновешивающий верхнюю часть крана. По нижнему поясу стрелы перемещается грузовая каретка 15 с помощью тяговой лебедки 13, размещенной внутри корневой секции стрелы. Наращивание башни осуществляют с помощью монтажной стойки 5. Для подъема груза применяют двукратные (рис.78,д) или четырехкратные (рис.78,г) грузовые полиспасты, обеспечивающие различные грузовые характеристики. Запасовка канатов механизмов передвижения и грузовой каретки показана на рис.78,б, в.
Кран КБ-674А с неподвижной башней имеет свыше десяти исполнений, отличающихся высотой башни, длиной стрелы и грузовой характеристикой, что обусловило его широкое применение для механизации строительно-монтажных работ при возведении высотных жилых и административных зданий, а также промышленных объектов.
Приставные (стационарные) башенные краны (рис.79) применяют при строительстве высотных сооружений (высотой 150 м и более). Они выполняются с поворотной головкой, горизонтальной стрелой и перемещающейся по ней грузовой кареткой. Приставные краны монтируют на фундаменте, который может быть специальным или являться частью фундамента здания.
Увеличение высоты башни кранов осуществляется методом подращивания снизу или методом наращивания ее сверху промежуточными секциями, длина которых составляет 2,5…7 м. У приставных кранов и кранов с неповоротной башней, имеющих значительную высоту подъема крюка, наращивание ведется методом сверху. При наращивании башни две крайние верхние секции крепят к монтажной стойке 2 и расстыковывают между собой. Предварительно промежуточная секция 4 поднимается крюковой подвеской и навешивается на выдвижную раму 3. Запасовка канатов монтажного полиспаста показана на рис.79,г. Монтажной лебедкой 7 верхняя часть крана с оголовком, стрелой и противовесной консолью перемещается вверх по направляющим стойки и в образовавшееся между расстыкованными секциями пространство ручной лебедкой заводится новая промежуточная секция. Башня крана крепится к зданию с помощью закладных рам 1, монтируемых между двумя секциями (рис.79,в). У башенных кранов, башня которых охвачена порталом (см. рис.77), применяют метод подращивания секций башни снизу, при котором очередная промежуточная секция заводится снизу, пристыковывается к башне и с помощью монтажной лебедки выдвигается вверх. Метод подращивания проще, так как работы ведутся с земли, но требует более мощных лебедок для подъема башни.
Самоподъемные краны. Их изготовляют грузоподъемностью до 15 т с грузовым моментом до 3300 кНм. Вертикальное перемещение крана осуществляется следующим образом (рис.80). Башня крана 1 опирается на опорные балки с откидными упорами 3 и охвачена вертикально подвижной обоймой 2, также снабженной откидными упорами 4, но в другой плоскости. Специальной лебедкой 5 обойма снимается с упоров и поднимается на высоту двух этажей и вновь устанавливается на упоры. После этого башня и опорные балки снимаются со своих упоров, подтягиваются на высоту двух этажей и устанавливаются на каркас здания. Демонтаж крана ведется в обратной последовательности. При такой конструкции крана не (требуется большая длина башни. Самоподъемные краны применяются на строительстве зданий с металлическим каркасом.
Специальные монтажные башенные краны. Такие краны изготовляются с грузовым моментом 10000…15000кН·м в нескольких исполнениях, в том числе для гидротехнического строительства. Для выполнения монтажных операций одновременно используют два или три башенных крана. Краны располагают таким образом, чтобы они могли работать раздельно – каждый в своей зоне и совместно – при установке наиболее тяжелых блоков и технологического оборудования.
Схема башенного крана с грузовым моментом 10000 кН·м представлена на рис.81. Конструкция крана существенно отличается исполнением металлоконструкций и механизмов. Поворотная часть крана опущена внутрь портала 6.
Портал состоит из цилиндра, трех опорных ног и опорной диафрагмы 3. На опорной диафрагме портала установлены подпятник 4 и цевочное колесо механизма вращения. Башня крана 1 опирается на подпятник и на горизонтальные опорные катки 14, установленные в диафрагме секции башни, обкатывающиеся по кольцевому рельсу цилиндра. Портал опирается на ходовые тележки 5, каждая из которых передвигается по двухколейному рельсовому пути. Он служит также для размещения на нем балласта и пропуска под краном железнодорожного подвижного состава. Краны такого типа снабжаются стрелами 10 с удлинителями (гуськами) 11 и оборудуются механизмами с полиспастами главного 13 и вспомогательного 12 подъема. Грузоподъемность вспомогательного подъема постоянна на всех вылетах. У большинства моделей кранов вылет изменяется наклоном стрелы с помощью стреловой лебедки и стрелового полиспаста 9. Для уравновешивания стрелы и груза кран снабжен противовесной консолью 8 и противовесом 7. Лебедки крана, пускорегулирующая аппаратура и пульт управления краном размещаются в машинном отделении 2, опоясывающем башню и вращающемся вместе с ней.
Стреловые колесно-рельсовые краны (СКР). Отличительной особенностью СКР является наличие у них башенно-стрелового оборудования (шарнирно сочлененных стрел) и специальных рельсовых путей, ширина колеи которых достигает 15м. Эти краны имеют грузоподъемность 30…100т при грузовом моменте 15000….30000кН·м. Большие значения вылетов (6,6…31м) и высот подъема груза (30…145м) достигаются при наибольшей грузоподъемности. Так, кран с грузовым моментом 30000 кН·м способен поднять груз 100т на высоту 107м при вылете 30м.
Большая грузоподъемность при значительных вылетах и высоте подъема груза создает экономическую целесообразность применения таких кранов на новом строительстве или при реконструкции промышленных объектов и предприятий, например для монтажа конструкций угольных ГРЭС с блоками 800 и 1000 мВт, зданий котлоагрегатов и аппаратных отделений АЭС и др.
Башенные краны имеют многодвигательный электропривод с питанием от внешней электросети напряжением 220/380В через кабель и токоприемник. Всеми механизмами крана управляет машинист из кабины, в которой размещена аппаратура управления. Рабочие движения башенных кранов выполняются с помощью механизмов подъема груза, изменения вылета, поворота и передвижения. Для механизмов подъема груза и изменения вылета применены электрореверсивные лебедки. Регулирование скорости подъема и опускания груза в электрореверсивных лебедках с двигателями переменного тока возможно только в ограниченных пределах, определяемых жесткой внешней механической характеристикой крановых асинхронных двигателей. Вместе с тем развивающиеся тенденции в укрупнении монтажных элементов и ограничении допусков на их монтаж требуют от грузоподъемных машин плавной посадки строительных конструкций на место установки. С этой целью в электрореверсивных лебедках, используемых в кранах в качестве механизмов подъема грузов, применяют тормозные генераторы (вихревые тормоза), двигатели с частотным регулированием скорости на переменном токе или двигатели постоянного тока, позволяющие получить значительно большие пределы регулирования скоростей, повышать скорости подъема и опускания малых грузов и пустого крюка, осуществлять плавное регулирование скорости при подъеме и торможении груза.
Электрореверсивная лебедка с тормозным генератором и характеристика тормозного генератора показаны на рис.82. Тормозной генератор монтируется на противоположной от двигателя 3 стороне
редуктора. Статор генератора 1 жестко закреплен на корпусе редуктора, а ротор 2 – с ротором электродвигателя и вращается вместе с ним. При вращении ротора генератора в постоянном магнитном поле неподвижного статора в нем создается в результате взаимодействия полей тормозной момент, пропорциональный скорости вращения ротора и регулируемому току возбуждения обмоток статора. При наложении характеристики генератора на внешнюю механическую характеристику двигателя получают совместные характеристики с плавно изменяющимися малыми скоростями опускания груза. В некоторых конструкциях башенных кранов для механизма подъема груза используют две электрореверсивные лебедки, совместная работа которых значительно расширяет диапазон рабочих скоростей (рис.79,б). По такой схеме возможна совместная работа барабанов 5 и 6 в одном или разных направлениях, работа только одного барабана при заторможенном втором.
В монтажных кранах большой грузоподъемности применяют многоскоростные лебедки с несколькими двигателями и барабанами. На рис.83 показана схема такой грузовой лебедки крана с грузовым моментом 10000 кН·м. Кинематическая схема основана на применении редуктора 5 с несимметричным дифференциалом 6. Электродвигатели 2 и 11 посредством зубчатых муфт 3 и 10 соединены с валами 7 и 8 несимметричного дифференциала. На валах двигателя установлены колодочные тормоза 4 и 9. На выходных валах редуктора смонтированы барабаны 1 и 12, свободно вращающиеся на оси 13. В лебедке, изготовленной по этой схеме, можно получить четыре скорости в каждом направлении: первая – при вращении обоих двигателей в одном направлении; вторая – при вращении только двигателя 2; третья – при вращении только двигателя 11; четвертая – при вращении двигателей 2 и 11 в противоположных направлениях.
Опорная часть передвижных башенных кранов (рис.84,а) включает нижнюю ходовую раму 3, шарнирные кронштейны 2 и четыре ходовые тележки 1. В рабочем положении ходовые тележки удерживаются тягами 5 в соответствии с шириной рельсового пути. В транспортном положении тележки
устанавливают вдоль продольной оси, уменьшая ширину неповоротной части крана. Шарнирное крепление тележек с ходовой рамой обеспечивает крану возможность перемещения по криволинейному пути и не требует демонтажа тележек при переводе крана в транспортное положение. Для лучшего вписывания в кривые участки пути приводные ходовые тележки располагают по одной стороне крана. Ходовые тележки (приводные и неприводные) могут иметь два, три и большее число ходовых колес (рис.84,б). Для равномерного распределения нагрузок между колесами они объединяются в балансирные тележки. Механизм передвижения приводных ходовых тележек (рис.84,в) состоит из электродвигателя 10, муфты с тормозом 9, редуктора 8 и открытой зубчатой передачи 6, приводящей во вращение ходовые колеса 7. На нижней ходовой раме укреплено опорно-поворотное устройство 4, которое воспринимает вертикальные и горизонтальные усилия от поворотной части крана. У большинства кранов оно выполнено в виде специального упорного подшипника большого диаметра, состоящего из наружного 13 и внутреннего 11 колец, шариковых или роликовых тел качения 12 и зубчатого венца. Зубчатый венец и внутреннее колесо крепятся к неподвижному основанию, а наружное кольцо соединено с поворотной платформой. Кинематические схемы механизмов вращения показаны на рис.85.
Механизм вращения (рис.85,а) состоит из двигателя 2, цилиндрического или планетарного редуктора 1 и тормоза 3. Выходная шестерня механизма 4, установленного на поворотной платформе, находится в постоянном зацеплении с неподвижным зубчатым венцом и заставляет поворачиваться платформу вокруг оси 1-1. Механизмы вращения тяжелых монтажных башенных кранов выполняются с цевочным зацеплением поворотного венца с выходным колесом редуктора или с канатным приводом, принципиальные схемы которых представлены на рис. 85,б, е. Они снабжаются муфтами предельного момента, срабатывающими при действии на кран чрезмерных инерционных и ветровых нагрузок.
§
Стреловые самоходные краны широко используются при производстве строительно-монтажных и погрузочно-разгрузочных работ. Основным достоинством стреловых самоходных кранов является автономность их привода, способность быстрого перебазирования с одного объекта на другой, большое разнообразие сменного оборудования.
Стреловые самоходные краны классифицируют по типу ходового оборудования и привода, по исполнению и виду стрелового оборудования. По типу ходового оборудования их разделяют на краны автомобильные, пневмоколесные, на специальном шасси автомобильного типа, гусеничные, на короткобазовом шасси, на тракторах и прицепные. По типу привода краны бывают с одно- и многомоторным (индивидуальным) приводом. Чаще применяют многомоторный привод – электрический, дизель-электрический, гидравлический или комбинированный (с различными типами привода отдельных механизмов). По исполнению и виду стрелового оборудования стреловые самоходные краны выпускаются с не выдвижными (постоянной длины), выдвижными и телескопическими стрелами. Длина выдвижных стрел изменяется без нагрузки, телескопических – с нагрузкой на крюке. Телескопические стрелы в сочетании с гидроприводом преимущественно применяют в конструкциях автомобильных кранов и кранов на специальном шасси автомобильного типа, так как благодаря взаимному перемещению секций относительно друг друга обеспечивается наводка монтажного элемента на место установки, в том числе и в труднодоступных местах. Длину стрел изменяют вставкой дополнительных секций или установкой управляемых гуськов. На стреловых кранах широко используется башенно-стреловое оборудование.
Паспортная грузоподъемность всех стреловых кранов (кроме гусеничных) может быть реализована только при работе на выносных опорах, когда ходовое оборудование полностью освобождается от нагрузки. При работе без выносных опор грузоподъемность снижается в несколько раз. Движение самоходных кранов с грузом допускается со значительными ограничениями по грузоподъемности и скорости, указываемой в технической характеристике крана, и только при стреле, расположенной вдоль оси ходовой части крана.
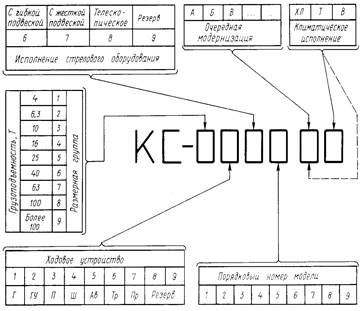 | Кранам, выпускаемым заводами, присваивается индекс, состоящий из двух букв – КС (кран стреловой) и четырех цифр. Цифры означают: первая – размерную группу, вторая – тип ходового оборудования, третья – исполнение стрелового оборудования, четвертая – порядковый номер модели. После цифр в индексе могут указываться очередная модернизация (А, Б, В) и климатическое исполнение (ХЛ, Т, ТВ). Так, индекс КС-8362ХЛ означает: кран стреловой грузоподъемностью 100 т, пневмоколесный с гибкой подвеской, второй модели в северном исполнении. Действует и другая индексация. Например, МКГ-25БР – монтажный кран гусеничный, грузоподъемностью 25т с башенно-стреловым оборудованием и раздвижными гусеницами, СКГ-63А – стреловой кран гусеничный, грузоподъемностью 63 т, модернизация А. |
Автомобильные краны. Автомобильные краны выпускаются грузоподъемностью 4; 6,3; 10 и 16т. Их монтируют на двух- или трехосном шасси серийно выпускаемых грузовых автомобилей. Привод всех механизмов автомобильных кранов осуществляется от двигателя автомобиля. По типу привода различают автомобильные краны с механическим (преимущественно малых типоразмеров),гидравлическим и электрическим приводом. Кроме основной стрелы краны оснащаются удлиненными стрелами, стрелами с гуськами, башенно-стреловым оборудованием, а гидравлические краны – телескопическими выдвижными стрелами. В зависимости от массы поднимаемого груза и вылета стрелы, краны могут работать на выносных опорах или без них, перемещаться с грузом в пределах строительной площадки, масса которого меньше номинального на соответствующем вылете, со скоростью до 5 км/ч при положении груза вдоль оси крана («стрела назад») и поднятом на высоту не более 0,5 м.
При механическом приводе движение от двигателя рабочим механизмам передается через систему промежуточных передач. При этом скорость рабочих движений регулируют частотой вращения двигателя и коробками перемены передач, а направление вращения – коническими и цилиндрическими реверсами. Для управления механизмами (муфтами, тормозами) применяют пневматическую систему управления, действующую от компрессора, приводимого в работу от двигателя автомобиля.
На рис.86. показана схема автомобильного крана с механическим приводом. Для снижения нагрузок на шасси автомобиля и обеспечения его устойчивости шасси 1 усиливают дополнительной рамой 4, которую оборудуют выносными опорами 3 и 8 и стабилизирующим устройством 6, блокирующим подвеску автомобиля при работе крана. Поворотная платформа 9 вращается на роликовом опорно-поворотном устройстве 7, закрепленном на дополнительной раме. На поворотной платформе кроме стрелы размещены: противовес 10, двуногая стойка 11, реверсивно-распределительный механизм 13, механизм вращения 14, грузовая 15 и стреловая 12 лебедки, кабина крановщика и электрооборудование.
Крутящий момент двигателя через коробку перемены передач, коробку отбора мощности 2 и промежуточный редуктор 5 передается реверсивно-распределительному механизму 13 и далее при переключении муфт в распределительной коробке – механизму вращения 14, грузовой 15 и стрелоподъемной 12 лебедкам. Кинематическая схема позволяет совмещать операции подъема груза с поворотом поворотной платформы. Гидравлический и электрический приводы существенно упрощают кинематическую схему крана, расширяют технологические возможности крана и обеспечивают более глубокое регулирование скоростей рабочих движений.
На рис.87,а показан общий вид гидравлического крана. Основным видом рабочего оборудования является телескопическая стрела 1, состоящая из подвижных и неподвижной секций. Передвижение подвижной секции производится гидроцилиндром 2 двустороннего действия. Для увеличения подстрелового пространства на подвижной секции устанавливают гуськи разной длины и под различными углами к ее продольной оси Изменение угла наклона стрелы производится параллельно действующими гидроцилиндрами 3 с фиксацией их штоков в заданном положении гидрозамками. Подъем и опускание груза осуществляются грузовой лебедкой, состоящей из гидромотора 10, редуктора 8, барабана 9 и нормально-замкнутого тормоза. Механизм вращения 7 состоит из гидромотора 6, редуктора 4, на выходном валу которого установлена шестерня, входящая в зацепление с неподвижным венцом опорно-поворотного круга. Фиксирование механизма поворота осуществляется тормозом 5.
Гидравлический насос 11 приводится в движение от двигателя автомобиля 14 через коробку передач 13 и редуктор отбора мощности 12. Система привода и управления им допускает совмещение операций: подъем и опускание груза – с подъемом и пусканием стрелы, с поворотом платформы, с выдвижением и втягиванием секции телескопической стрелы; подъем и опускание стрелы – с выдвижением и втягиванием ее секции, с поворотом платформы; поворот платформы – с выдвижением и втягиванием секции стрелы.
На рис.87,б показаны: 1) характеристика грузоподъемного крана четвертой размерной группы: а – при работе на выносных опорах со стрелой 9,75…21,7 м; б – для телескопической стрелы с гуськом общей длиной 27 м; в – при работе без выносных опор; 2) высота подъема крюка: I – для стрелы с гуськом; II – для стрелы длиной 21,7; III-то же, 9,75 м.
При дизель-электрическом приводе каждый механизм имеет индивидуальный электродвигатель, получающий энергию от генератора трехфазного тока, вращаемого двигателем автомобиля.
Автомобильные краны оснащаются устройствами, обеспечивающими их безопасную эксплуатацию: ограничителями грузоподъемности, высоты подъема крюка, угла наклона стрелы, указателями крена и грузоподъемности.
Пневмоколесные краны. Они имеют грузоподъемность 25, 40, 63 и 100 т. Большая грузоподъемность пневмоколесных кранов в сочетании со значительными высотой подъема (до 55 м) и вылетом крюка (до 38м) обусловили их широкое использование на строительстве промышленных предприятий, сооружений, тепловых электростанций и установке технологического оборудования.
Пневмоколесный кран состоит из двух основных частей: поворотной и ходовой, соединенных между собой опорно-поворотным устройством. На поворотной части крана располагаются рабочее оборудование, силовая установка, механизм главного и вспомогательного подъема груза, механизм изменения вылета стрелы, механизм вращения поворотной части и кабина управления. Рабочим оборудованием крана служит основная решетчатая стрела, удлиненные вставками стрелы с управляемыми и неуправляемыми гуськами различных размеров, а также башенно-стреловое оборудование. Все механизмы крана имеют индивидуальный электрический привод постоянного тока по системе Г–Д (генератор – двигатель). Силовая установка обеспечивает глубокое регулирование рабочих скоростей в широком диапазоне путем изменения напряжения генератора, питающего якори двигателей, что особенно существенно для механизмов подъема груза и передвижения крана при выполнении монтажных операций.
Ходовая часть крана состоит из сварной ходовой рамы, опирающейся на ведущие и управляемые мосты автомобильного типа, и выносных опор. Количество мостов (2…5) зависит от грузоподъемности крана. При большой грузоподъемности мосты крана объединяются в балансирные тележки с жесткой подвеской к ходовой раме. Управление передвижением из кабины машиниста и жесткая подвеска мостов ограничивают скорость передвижения крана до 18 км/ч. В рабочем положении кран опирается на выносные опоры. Допускается работа крана без выносных опор и передвижение его с грузом на крюке в соответствии с грузовой характеристикой крана.
На рис.88 показан общий вид мощного пневмоколесного крана грузоподъемностью 100 т, схемы запасовки при работе с основным и сменным оборудованием, характеристики грузоподъемности для некоторых его видов. Кран оборудован основной стрелой длиной 15 м. Длину последней с помощью секций можно увеличивать до 26, 25, 30, 40, 50 и 55 м. Стрелы длиной 20…40 м оснащают неуправляемым гуськом,; длиной 45…55 м – управляемым. Гуськи крана состоят из отдельных секций длиной по 5 м каждая.
При работе крана без гуська лебедки основного и вспомогательного подъемов используются для подъема основного груза; при оборудовании управляемым гуськом лебедка главного подъема обеспечивает изменение вылета гуська. Силовая установка состоит из дизеля 1, вращающего основной 2 и вспомогательный 3 генераторы, насоса 5 гидравлической системы управления выносными опорами. При длительной работе на площадке вместо дизеля используют электрический двигатель 4, питаемый от сети переменного тока. Основной генератор обеспечивает работу двигателей основного и вспомогательного подъемов, стрелоподъемного механизма и механизма передвижения.
Вспомогательный генератор питает двигатель механизма вращения. Механизмы кранов состоят из рабочих двигателей, редукторов, соединительных муфт и тормозов и исполнительных органов (барабанов, зубчатых колес).
Кинематическая схема крана позволяет совмещать операции: подъем и опускание груза на крюке главного подъема с поворотом крана; подъем и опускание стрелы с подъемом и опусканием груза; подъем и опускание груза крюком вспомогательного подъема с поворотом крана. Пневмоколесный кран транспортируется собственным ходом, на буксире к тягачу или по железной дороге.
Краны на специальных шасси автомобильного типа. По своему технологическому назначению краны данного типа должны обеспечивать эффективную работу на рассредоточенных объектах, иметь большую грузоподъемность, хорошую проходимость и маневренность в условиях строительной площадки. В современных конструкциях кранов эти требования реализуются путем применения специальных шасси автомобильного типа, гидравлического привода механизмов крана и телескопических стрел, что создает им значительные преимущества по сравнению с пневмоколесными кранами с решетчатыми стрелами. Грузоподъемность кранов на специальных шасси 25…500 т, скорость передвижения 60…70 км/ч.
По конструкции специальные шасси существенно отличаются от обычных шасси автомобиля числом приводных и управляемых осей, их распределением на базе, конструкцией подвесок и управления. Для удовлетворения требований о предельной нагрузке на ось специальные шасси изготовляют многоосными (3…8 осей). Число приводных осей назначают, исходя из условий достижения проходимости при движении по стройплощадке, а число управляемых осей выбирается из расчета минимального радиуса поворота, достаточного для вписывания крана в сушествующую дорожную сеть.
На рис.89 показан общий вид крана грузоподъемностью 120 т на шестиосном шасси с колесной формулой 12Х8 с четырьмя управляемыми осями. Отличительной особенностью кранов на специальных шасси является также наличие у них двух силовых установок, из которых одна размещена на шасси .1, а вторая – на поворотной части крана 4. Силовая установка, расположенная на шасси, обеспечивает передвижение крана и привод гидравлических насосов для управления выносными опорами 6. Силовая установка поворотной части крана обеспечивает работу крановых механизмов. Она состоит из дизеля, гидравлических насосов (одного или нескольких), питающих через гидрораспределители гидравлические моторы лебедок главного и вспомогательного подъемов 5 и механизма вращения крана.
Кроме того, эти насосы питают гидроцилиндры подъема стрелы 3 и гидроцилиндры выдвижения секций телескопической стрелы 2. Гидропривод кранов позволяет получить широкий диапазон скоростей рабочих движений механизмов за счет совмещения расходов жидкости двух напорных линий по параллельной или последовательной схеме, а также совмещение рабочих движений в разных вариантах. Управление рабочими операциями крана производится из кабины, расположенной на поворотной части.
Механизмы лебедок состоят из одного или двух гидромоторов, цилиндрических редукторов, встроенных в барабаны, колодочных или дисковых тормозов. Телескопические стрелы конструктивно выполняются из трех (у кранов грузоподъемностью 25 и 40 т) и четырех (у кранов грузоподъемностью 63 и 100 т) секций и оснащаются удлинителями различных размеров. Выдвижение секций осуществляется гидроцилиндрами, а последней секции – канатным приводом.
При работе крана вся нагрузка от собственной силы тяжести и массы груза воспринимаются выносными опорами, при этом горизонтальность платформы контролируется системой автоматики. Отечественной промышленностью выпускаются краны на специальных шасси грузоподъемностью 25, 40, 63 и 100 т.
Краны на короткобазовом шасси. Они бывают двухосными, с обеими ведущими и управляемыми осями и базой в пределах 1,8…2,0 м, имеют малый радиус поворота и предназначены для работы в стесненных условиях. Гидравлические насосы приводятся от коробки отбора мощности привода шасси. Краны изготовляются грузоподъемностью 6,3…10, 16 и 25 т.
Гусеничные краны. Применение для стреловых кранов гусеничного ходового оборудования привело к созданию монтажных гусеничных кранов с большой номенклатурой их по грузоподъемности – 16, 25, 40, 63, 100, 160, 250 т. Гусеничные краны работают без выносных опор и могут передвигаться в пределах строительной площадки в любом направлении со скоростью 0,5…1,0 км/ч. Высокая маневренность, а также большая грузоподъемность обусловили их широкое применение в различных отраслях строительства на объектах с большими и в том числе с рассредоточенными объемами работ для монтажа укрупненных конструкций и технологического оборудования. Эти качества создали гусеничным кранам высокую конкурентную способность по отношению к специальным башенным кранам, требующим устройства подкрановых путей. На рис.90 приведена конструктивная схема монтажного гусеничного крана с
различными видами рабочего оборудования. Он состоит из поворотной платформы, опирающейся через опорно-поворотное устройство на ходовую часть крана. На поворотной платформе монтируются рабочее оборудование, силовая установка, механизмы стреловой и грузовых (основного и вспомогательного подъема) лебедок, механизм вращения и управления краном. Гусеничные краны изготовляются с механическим (групповым) и электрическим приводом. Для тяжелых гусеничных кранов грузоподъемностью 25т и более применяется электрический привод по системе двигатель – генератор – двигатель.
Кинематические схемы силовой установки и механизмов показаны на рис.91,а. Ходовая часть гусеничных кранов состоит из неповоротной рамы, опирающейся на две приводные гусеничные тележки с многоопорными гусеничными звеньями, обеспечивающими низкие (до 0,1МПа) удельные давления на грунт. Механизмы передвижения тележек выполняются с независимым приводом каждой гусеницы, либо с приводом от одного или от двух двигателей, работающих на один вал. Кинематическая схема механизма передвижения с независимым приводом монтажного гусеничного крана дана на рис.91,б. Привод каждой гусеницы 7 состоит из тихоходного электрического двигателя, редукторов, ведущей звездочки гусеницы и тормоза. Поворот крана осуществляется торможением одной из гусениц. Для увеличения опорного контура при работе поперек гусениц у ряда моделей гусеничных кранов применяют раздвижные гусеничные тележки.
Перебазирование гусеничных кранов с одной строительной площадки на другую осуществляется с помощью специальных транспортных средств – тяжеловозов.
Специальные краны-трубоукладчики. Используются в строительстве нефте- и газопроводов для укладки сварных трубопроводов в траншею, обслуживания очистных и изоляционных машин и других подъемно-транспортных операций. Стрела крана монтируется сбоку трактора, который в рабочем положении передвигается вдоль траншеи.
Кран-трубоукладчик (рис.92) состоит из базового трактора 1, стрелы 4, лебедок для полиспастов
независимого подъема стрелы 3 и груза 5 и выдвижного противовеса 2. Ходовое оборудование крана должно обеспечивать надежную продольную и поперечную устойчивость машины и быть приспособленным к работе в сложных дорожных и климатических условиях. Для этого оно выполняется с расширенной колеей, удлиненными и уширенными гусеницами, а для увеличения силы тяги – ходоуменьшителями. Независимый привод стреловой и грузовой лебедок, а также изменение вылета противовеса осуществляются от вала отбора мощности трактора через редукторы. У некоторых моделей кранов привод – гидравлический. Грузоподъемность крана зависит от диаметра укладываемого трубопровода. Так, для укладки трубопроводов малых диаметров (425, 720 мм) применяют трубоукладчики грузоподъемностью 6,3…12,5 т; для средних диаметров (1020 мм) – грузоподъемностью до 30 т; больших диаметров (1420, 1620 мм) – грузоподъемностью до 80 т. В укладке длинных сварных труб одновременно участвуют три-четыре машины.





