
- Введение
- (проводники закреплены пазовой крышкой).
- Актуальность темы
- 1 Параметры задания и выбор варианта задания
- 6 Расчет механических характеристик
- 2 управление пуском асинхронных двигателей
- Цель и задачи исследования, планируемые результаты
- 2 Управление пуском АД с короткозамкнутым ротором
- 1 Виды неисправностей и общий вид системы их диагностики
- 2 Методы диагностики асинхронного двигателя
- Технические требования к параметрам устройства диагностики по сигналам токов и напряжений статора асинхронного двигателя
- Короткозамкнутый ротор асинхронного двигателя
- Масштаб мощности:
- Нереверсивная схема
- Преобразование энергии
- Реверсивная схема
- Реферат: расчет асинхронного двигателя с короткозамкнутым ротором –
- Выводы
Введение
Асинхронные двигатели (АД) широко используется в производстве, транспортировке, нефтехимической, горнодобывающей, энергетической системах и т. д. Это обусловлено их высокой надежностью, простотой конструкции, высокой перегрузочной способностью и высокой эффективностью.
Порой, как и любая другая машина такой двигатель может выйти из строя из-за тяжелых рабочих условий, агрессивной рабочей среды, не правильной установки и сборки и т.д.
Отечественный и зарубежный опыт показывает, что внедрение средств диагностирования является одним из важнейших факторов повышения экономической эффективности использования оборудования в промышленности. Назначение диагностики – выявление и предупреждение отказов и неисправностей, поддержание эксплуатационных показателей в установленных пределах, прогнозирование состояния в целях полного использования ресурса [2].
(проводники закреплены пазовой крышкой).
![]()
Коэффициент магнитной проводимости лобового рассеяния:
![]()
Коэффициент магнитной проводимости дифференциального рассеяния, определим по формуле:


![]()
![]()
![]()
![]()
По формуле (6.13) рассчитаем индуктивное сопротивление обмотки статора:
6.13 Определим относительное значение индуктивного сопротивления обмотки статора ![]()
![]()
6.14 Произведём расчёт индуктивного сопротивления фазы обмотки ротора по формуле:
![]()
где lп2
– коэффициент магнитной проводимости паза ротора;
lл2
– коэффициент магнитной проводимости лобовой части ротора;
lд2
– коэффициент магнитной проводимости дифференциального рассеяния ротора.
Коэффициент магнитной проводимости паза ротора рассчитаем по формуле, исходя из [1] таблица 9.27:

![]()
![]()
![]()
6.15 Коэффициент магнитной проводимости лобовой части ротора определим по формуле:

6.16 Коэффициент магнитной проводимости дифференциального рассеяния ротора определим по формуле:


6.17 Найдём значение индуктивного сопротивления по формуле (6.19):
Приведём x2
к числу витков статора:
![]()
![]()
![]()
Актуальность темы
У электродвигателей после ремонта с разборкой и заменой деталей надежность работы часто снижается. Во время ремонта проблематично выявить скрытые дефекты, такие, например, как дефекты стержней короткозамкнутого ротора или нарушение изоляции обмотки статора [3].
Выбор стратегии и методов диагностирования асинхронных двигателей определяется рядом факторов. Первостепенное значение имеет конечная цель диагностирования, которая зависит от того, на каком этапе жизненного цикла определяется техническое состояние двигателя: на этапе производства, эксплуатации или ремонта [4].
В настоящее время существует потребность диагностики состояния асинхронных электродвигателей в процессе их работы. Своевременно обнаруженное повреждение позволит избежать дальнейшего развития процесса, уменьшить время восстановления, сократить затраты на обслуживание, избежать простоев оборудования, повысить эффективность работы двигателей и производственных механизмов. Поэтому диагностика АД является уникальной научно-практической задачей.
1 Параметры задания и выбор варианта задания
Вариант задания выбирается по двузначному шифру, присвоенному студенту преподавателем; для студентов заочной формы обучения – по двум последним цифрам шифра зачетной книжки.
Параметры нагрузки на каждой ступени, синхронная частота вращения АД и требуемое снижение частоты вращения ротора в процентах от номинальной приведены в таблице 1.1, а длительность ступеней – в таблице 1.2.
При расчете принять, что в период паузы (t5
) двигатель работает в режиме холостого хода без отключения от сети.
Напряжение питающей (цеховой) сети принять в зависимости от мощности двигателя:
от 22 до 75 кВт – 380 В,
от 45 до 110 кВт – 660 В,
от 45 до 75 кВт – 380 либо 660 В (выбрать по желанию).
Снижение напряжения в питающей сети для проверки выбранного АД на перегрузочную способность принять 10 % от номинального для всех вариантов.
Число ступеней пускового реостата для всех вариантов z = 2.
Таблица 1.1 – Параметры нагрузки
| Последняя цифра варианта | Мощность на ступенях нагрузки, кВт | Синхронная частота вращения, об/мин | ∆n % | |||
| Р1 | Р2 | Р3 | Р4 | |||
| 0 | 3 | 5 | 9 | 4 | 750 | 5,8 |
| 1 | 7 | 13 | 9 | 18 | 750 | 5,5 |
| 2 | 15 | 10 | 35 | 22 | 750 | 4,6 |
| 3 | 13 | 6 | 10 | 5 | 1000 | 4,8 |
| 4 | 18 | 22 | 9 | 12 | 1000 | 4,0 |
| 5 | 22 | 30 | 40 | 25 | 1000 | 4,5 |
| 6 | 8 | 15 | 5 | 18 | 1000 | 4,2 |
| 7 | 25 | 12 | 15 | 10 | 1500 | 5,0 |
| 8 | 25 | 35 | 45 | 12 | 1500 | 5,7 |
| 9 | 45 | 27 | 40 | 50 | 1500 | 6,0 |
Таблица 1.2 – Длительность ступеней нагрузки
| Длительность ступеней нагрузки, мин | Предпоследняя цифра варианта (шифра) | |||||||||
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | |
| t1 | 10 | 13 | 12 | 13 | 9 | 6 | 16 | 10 | 11 | 7 |
| t2 | 5 | 7 | 9 | 8 | 15 | 8 | 6 | 12 | 7 | 14 |
| t3 | 15 | 9 | 14 | 9 | 8 | 18 | 13 | 15 | 18 | 10 |
| t4 | 8 | 13 | 8 | 11 | 12 | 10 | 9 | 6 | 9 | 13 |
| t5 | 7 | 8 | 7 | 4 | 6 | 8 | 6 | 7 | 5 | 6 |
Из приведенных таблиц 1.1 и 1.2 в соответствии с вариантом 08 следует:
мощности на ступенях нагрузки, кВт,
Р1
=22, Р2
=30, Р3
=40, Р4
=25,
длительность каждой ступени нагрузки, мин,
t1
=13, t2
=7, t3
=9, t4
=13, t5
=8.
Синхронная частота вращения АД–1000об/мин. Требуемое снижение частоты вращения на реостатной характеристике Δn=4,5%.
6 Расчет механических характеристик
Механическими характеристиками АД называют зависимости М=f(s) и n=f(M).
Аналитические выражения данных характеристик достаточно сложны, требуют знания многих параметров АД и для практических целей используются редко. Более удобной является так называемая формула Клосса, вполне удовлетворительно описывающая реальную характеристику в пределах изменения скольжения от 0 до критического Sк
.
Рисунок 1- Диаграмма потерь и кривые нагрева
Рисунок 2- Механическая характеристика M=f(s)
Рисунок 3- Механическая характеристика n=f(Me
)
Для расчета естественной механической характеристики находим:
номинальную частоту вращения, об/мин,
![]()
где n1
– синхронная частота вращения, об/мин,
Sн
– номинальное скольжение по каталогу, о.е.
![]()
номинальный момент, Н·м,
![]()
где Рн
– номинальная мощность,
![]()
критическое скольжение, соответствующее максимальному моменту,
![]()
где Sн
– номинальное скольжение,
Км
– кратность номинального момента.
максимальный момент, Н·м,
![]()
![]()
Задавшись величиной S от 0 до 1,2, можно рассчитать зависимость М=f(s), которую затем легко перевести в координаты n=f(M) по формуле:
![]()
Расчет механической характеристики производим по упрощенной формуле Клосса, Н·м,

где Км
– коэффициент перегрузочной способности,
S
– текущее значение скольжения,
Sк
– критическое скольжение,
Мн
– номинальный момент на валу двигателя, Н·м.
При отсутствии резисторов в цепи ротора имеем естественные характеристики.
Результаты расчета приведены в таблице 1.3, характеристики показаны на рисунках 2, 3, 4.
Таблица 1.3 – Механические характеристики выбранного АД
Исследуемые параметры машины S | 0 | SН =0,035 | 0,1 | SK =0.168 | 0,2 | SР.К =0,376 | 0,4 | 0,8 | 0,1 | 0,12 |
Частота вращения ротораn об/мин | 1000 | 965 | 900 | 832 | 800 | 624 | 600 | 200 | 0 | 0 |
| Моменты М , Н·м: | ||||||||||
| естественная характеристика | 0 | 233,81 | 653,00 | 641.58 | 730,9 | 514,914 | 529,3 | 298,1 | 242,1 | 203,5 |
| реостатная характеристика | 0 | 121,35 | 368,93 | 485.94 | 615,7 | 645,247 | 740,78 | 571,2 | 488,8 | 423,3 |
Введение добавочного сопротивления в цепь ротора приводит к увеличению критического скольжения, величина максимального момента при этом не изменяется. Иными словами, механическая характеристика смещается вниз, а М=f(s) – вправо. Тем самым при постоянном моменте сопротивления Мс
частота вращения несколько снижается.
При реостатной характеристике частота вращения ротора, при заданном Δn=4,5%, об/мин,
![]()
скольжение, соответствующее данной частоте вращения,
![]()
тогда необходимое добавочное сопротивление, Ом,
![]()
Критическое скольжение на реостатной характеристике,
![]()
2 управление пуском асинхронных двигателей
2.1 Общие положения
Цель и задачи исследования, планируемые результаты
Целью магистерской работы является обзор существующих методов диагностики асинхронного электродвигателя и определение наиболее простого и качественного из них.
Основные задачи исследования:
- Обзор литературных источников и определение существующих методов диагностирования асинхронных двигателей.
- Выделение достоинств и недостатков этих методов на стадии разработки и при практическом применении.
- Выявление оптимального метода диагностики и разработка схемы его практической реализации.
Планируемые результаты:
- Определение наилучшего метода диагностики асинхронного двигателя в процессе эксплуатации.
- Разработка схемы практической реализации этого метода.
- Расчет и выбор всех необходимых компонентов.
- Практическая реализация этой схемы.
2 Управление пуском АД с короткозамкнутым ротором
2.3 Управление пуском АД с фазным ротором в функции времени
3 Управление реверсом АД с короткозамкнутым ротором
Заключение
Библиографический список
1 Виды неисправностей и общий вид системы их диагностики
Различают внутренние и внешние причины неисправностей двигателя. Внутренние неисправности делятся на механические (повреждения подшипников, изнашивание изоляции и обмоток) и электрические (пробой изоляции, повреждения магнитного контура, обрыв стержня ротора).
Внешние неисправности могут быть механическими (плохой монтаж, пульсирующая нагрузка, перегруз), электрические (колебания напряжения, перебои в напряжение, неравномерное напряжение), на рисунке 1 показана относительная вероятность появления различных повреждений в асинхронном двигателе:
Дефекты подшипников могут быть классифицированы как распределенные или локальные. Распределенные дефекты включают в себя волнистость, шероховатость поверхности и элементы качения без изменения. Локализованные дефекты включают отскоки, ямы и трещины на поверхности качения.
Эти локализованные дефекты создают серию ударных вибраций в тот момент, когда движущийся валик проходит по поверхности дефекта, период и амплитуда которого вычисляются по положению, скорости и несущей аномалии. Поврежденными подшипниками производятся механические вибрации.
Эти колебания находятся на скорости вращения каждого компонента. Размеры подшипника и скорость вращения машины используются для определения характерных частот, связанных с дорожками качения, а также шарами или роликами. Состояние подшипника определяется путем изучения этих частот. Эта задача выполняется с использованием методов механического вибрационного анализа.
Неисправности в обмотке статора, такие как межвитковое короткое замыкание, обрыв цепи, межфазное замыкание и замыкание фазы с землей, являются одними из наиболее распространенных и потенциально разрушительных неисправностей.
Неисправности ротора могут быть вызваны электрическими неисправностями, такими как обрыв стержня или механические сбои, такие как неcоосноcть ротора. Первая неисправность возникает из-за термических напряжений, горячих точек или перенапряжений во время переходных операций, таких как пуск, особенно в крупных двигателях.
Сломанный стержень значительно меняет крутящий момент и становится опасным для работы электрических машин. Второй тип повреждения ротора связан с неравномерностью воздушного зазора. Эта ошибка является общим эффектом, связанным с рядом механических проблем в асинхронных двигателях, таких как дисбаланс нагрузки или несоосность вала.
Типичная диагностическая система, показанная рисунке 2, состоит из узла датчиков, который подает сигнал неисправности в блок обработки сигналов, который далее отправляет его результат для анализа экспертными системами, где в конечном итоге обнаруживается соответствующая неисправность.
2 Методы диагностики асинхронного двигателя
Идеальный современный способ диагностирования электродвигателей должен отвечать следующим требованиям:
Ряд источников выделяют метод анализа спектров тока двигателя[1], [5], [6], [7], [8], [9]. Он используется для обнаружения повреждений ротора, несоосности а статоре и неравномерность воздушного зазора.
Анализ сигнатуры тока двигателя основан на обнаружении токовых гармоник с частотами, которые различают каждую категорию неисправностей. Кроме того, не требуется дополнительная установка измерительной системы. Сломанные стержни вызывают асимметрию ротора, искажение распределения тока ротора и, следовательно, изменения магнитодвижущей силы ротора (МДС). Повреждение стержней ротора имеет отличительную характеристику частот, которые могут быть вычислены как:
На единицу скольжения двигателя можно рассчитать, как:
где fs и fr – частота питания и частота двигателя соответственно
р – количество полюсов.
В случае повреждения стержня можно ожидать боковые полосы вокруг частоты питания в спектре мощности фазного тока. В результате боковые полосы (гармоники) первого порядка (k=1) имеют особое значение в обнаружение неисправности поврежденного стержня.
Левая боковая полоса fs(1-2ks) обусловлена электрической или магнитной асимметрией ротора, вызванная повреждениями стержней ротора, в то время как правая боковая полоса fs(1 2ks) обусловлена пульсацией скорости или вибрацией.
Амплитуды и присутствие боковых полос зависят от физического положения неисправных стержней ротора, скорости и нагрузки. Расположение боковых полос будет смещаться наружу, если скорость и нагрузка увеличиваются. Доказано, что боковые полосы могут наблюдаться, когда электродвигатель не имеет поврежденных стержней ротора.
Это обусловлено тем, что эллиптичность ротора и несоосность вала могут в определенной степени вызвать асимметрию ротора. Тем не менее, амплитуды боковых полос, сформированные в этих случаях, намного меньше по сравнению с теми, которые возникают при поврежденных стержнях ротора.
В работе [6] использовались два неисправных двигателя, один с одним сломанным стержнем ротора, другой двигатель – с двумя сломанными стержнями. Роторы этих двигателей были просверлены и использованы в испытаниях для имитации повреждений стержней ротора, а затем сравнивались с исправным двигателем.
Рисунок 3 и рисунок 4 показывают два испытуемых ротора с одним и двумя поврежденными стержнями соответственно. Неисправности были вызваны аккуратным сверлением в стержнях вдоль их высоты таким образом, чтобы отверстие насквозь пронзило стержень.
На рисунке 5 показаны спектры тока исправного и неисправного двигателей при разных нагрузках. Амплитуды боковых полос исправного двигателя равны -27,27 дБ (слева) и -34,38 дБ (справа), тогда как они составляют -16,19 дБ (слева) и -19,03 дБ (справа) в случае одного поврежденного стержня и -13,01 дБ (слева)
и -14,80 дБ (справа) в случае двух поврежденных стержней. Разность амплитуд левых боковых полос в случае исправного ротора и ротора с двумя поврежденными стержнями составляет 14,26 дБ при 75% от полной нагрузки. Понятно, что амплитуда бокового диапазона увеличивается по мере увеличения нагрузки и степени серьезности неисправности, и что неисправность может быть лучше всего обнаружена при более высоких нагрузках.
В работе [7] был проведен похожий эксперимент, но с тремя поврежденными стержнями ротора.
Эффективным является и метод основанный на анализ вибрации двигателя[6], [7], [9]. Используя спектр вибрации двигателя, можно определить точную скорость и частоту сети, а также частоты, связанные с ошибками.
Всегда присущ дисбаланс массы ротора и несоосность вала, что приводит к пиковым компонентам в частоте вращения двигателя и к возникновению гармоник в его вибрационном спектре. Как упоминалось ранее, в случае повреждения стержня ротора происходит колебание скорости с частотой 2sfs.
Это колебание действует как частотная модуляция на частоте вращения и на двух частотах боковых полос (fr – 2sfr) и (fr 2sfr), которые проявляют fr в спектре вибрации.
Когда дисбаланс цепи ротора увеличивается, величина колебания скорости, а также величины частоты боковой полосы тоже увеличиваются. Следовательно, величины (fr ± 2sfr) могут быть хорошо измерены при обнаружении повреждений стержня.
На рисунке 6 показан спектр вибрации двигателя при различной нагрузке. На рисунке видны различия в боковых полосах между исправным состоянием и сломанным стержнем ротора на обеих сторонах спектра вибрации при 75% полной нагрузки. При нормальном состоянии амплитуды боковых полос первого порядка составляют -59,47 дБ (слева)
В работе [7] с помощью спектра вибрации показаны обнаружения повреждений в подшипниках двигателя.
В работах [7], [8] выделяются также интеллектуальные методы. К ним относят cистемы с фази логикой, искусственные нейронные сети, а также фази-нейронные сети. Нейронная сеть может быть использована, чтобы обнаружить, собственную асимметрию и отрицательную частоту сопротивления.
На рисунке 7 представлена схема нейронных сетей для мониторинга состояния асинхронного двигателя [7].
Работа [8] представляет собственный метод обнаружения неисправностей и диагностики неисправности переключающего устройства в асинхронном электродвигателе с инвертором напряжения ШИМ. Метод основан на стандартной модели тока статора (рисунок 8)
Также известны методы, основанные на анализе акустических колебаний, создаваемых работающей машиной, методы, основанные на измерении и анализе магнитного потока в зазоре двигателя и внешнего магнитного поля, методы, основанные на измерении и анализе температуры отдельных элементов машины, методы диагностики механических узлов (в частности подшипников) основанные на анализе содержания железа в масле, методы диагностики состояния изоляции [9].
По сопоставлению всех технических, методологических и экономических факторов можно сделать вывод, что для практической реализации наиболее перспективными являются методы диагностики АД, основанные на анализе электрических параметров двигателя, а именно спектров напряжений и токов.
Технические требования к параметрам устройства диагностики по сигналам токов и напряжений статора асинхронного двигателя
Для вывода технических требований к параметрам устройства диагностики по сигналам токов и напряжений статора асинхронного двигателя, был рассмотрен и проанализирован ряд источников.
Так в публикации [10] основные исследования проводились с такими частотами: спектр тока при неотбалансированном роторе – 120 Гц, вибрация подшипников – 180 Гц, при износе подшипников – 1000 и 3000 Гц.
В статье [11] указывается, что в общем случае при цифровой регистрации токов удовлетворительная точность имеет место при частотах их фиксации в (20 ÷ 30) раз больше частоты сети f1.
В статьях [5] и [9] для сравнения работы нового двигателя и двигателя, прослужившего некоторое время, был выбран диапазон частоты в 1000 Гц, а конкретные примеры диагностики дефектов двигателя проводилась на меньшем диапазоне (150 Гц и ниже).
На основании вышеприведенной информации делаем вывод, что частота дискретизации измерительного канала должна находится в пределах от 1500 до 3000 Гц.
Короткозамкнутый ротор асинхронного двигателя
По этому принципу также работает асинхронный электродвигатель. Вместо рамки с током внутри асинхронного двигателя находится короткозамкнутый ротор по конструкции напоминающий беличье колесо. Короткозамкнутый ротор состоит из стержней накоротко замкнутых с торцов кольцами.
Трехфазный переменный ток, проходя по обмоткам статора, создает вращающееся магнитное поле. Таким образом, также как было описано ранее, в стержнях ротора будет индуцироваться ток, в результате чего ротор начнет вращаться. На рисунке ниже Вы можете заметить различие между индуцируемыми токами в стержнях.
Вы также можете заметить, что стержни ротора наклонены относительно оси вращения. Это делается для того чтобы уменьшить высшие гармоники ЭДС и избавиться от пульсации момента. Если стержни были бы направлены вдоль оси вращения, то в них возникало бы пульсирующее магнитное поле из-за того, что магнитное сопротивление обмотки значительно выше магнитного сопротивления зубцов статора.
Масштаб мощности:
![]()
Масштаб момента:
![]() к
к
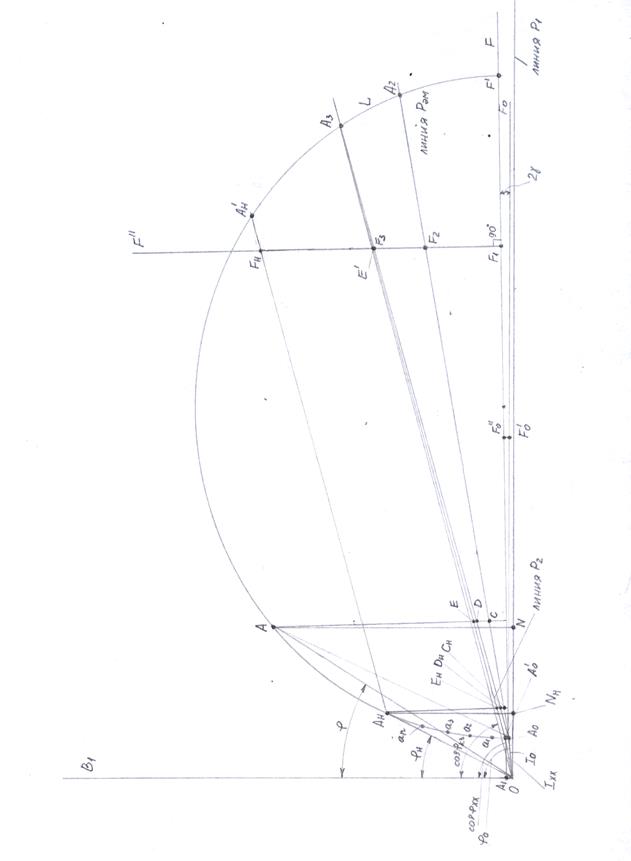
с центром О¢ является геометрическим местом концов вектора тока статора двигателя при различных скольжениях. Точка А0
определяет положение конца вектора тока I0
при синхронном холостом ходе, а ![]()
![]()
![]() 3
3
определяет положение конца вектора тока статора при коротком замыкании (s=1), отрезок ![]() к.з.
к.з.
, а угол ![]()
![]() 2
2
определяет положение конца вектора тока статора при ![]() 0
0
А3
определяют положение концов вектора тока I1
при различных нагрузках в двигательном режиме ![]() 1
1
. Линией электромагнитной мощности Рэм
или электромагнитных моментов Мэм
является линия А0
А2
. Линией полезной мощности на валу (вторичной мощности Р2
) является линия А’0
А3
.
Рисунок 10.1. Круговая диаграмма
Заключение
В данном курсовом проекте был спроектирован асинхронный электродвигатель с короткозамкнутым ротором. В результате расчета были получены основные показатели для двигателя заданной мощности з и cosj, которые удовлетворяют предельно допустимым значением ГОСТа для серии двигателей 4А. Был произведен расчет и построение рабочих характеристик проектируемой машины.
Таким образом, по данным расчета данному двигателю можно дать следующее условное обозначение:
4А315М10У3,
где:
4 – порядковый номер серии;
А – род двигателя – асинхронный;
315 – высота оси вращения;
М – условная длина станины по МЭК;
10 – число полюсов;
У – климатическое исполнение для умеренного климата;
3 – категория размещения.
Номинальные данные спроектированного двигателя:
Р2н
=110 кВт, U1н
=220/380 В, I1н
=216 А, cosjн
=0,83, hн
=0,93.
Список литературы
1. Проектирование электрических машин: Учеб. для вузов / П79
И.П. Копылов, Б.К. Клоков, В.П. Морозкин, Б.Ф. Токарев; Под ред. И.П. Копылова. – 4-е изд., перераб. и доп. – М.: Высш. шк., 2005. – 767 с.: ил.
2. Вольдек А.И., Попов В.В. Электрические машины. Машины переменного тока: Учебник для вузов. – СПб,: – Питер, 2007. –350 с.
3. Кацман М.М. Справочник по электрическим машинам: Учебное пособие для студентов образоват. учреждений сред. проф. образования/ Марк Михайлович Кацман. – М.: Издательский центр «Академия», 2005. – 480 с.
Приложение А
(обязательное)
Рисунок 1. Схема двухслойной обмотки с укороченным шагом, ![]()
![]()
![]()
Нереверсивная схема

L1, L2, L3 – контакты для подключения к сети трехфазного переменного тока, QF1 – автоматический выключатель, SB1 – кнопка остановки, SB2 – кнопка пуска, KM1 – магнитный пускатель, KK1 – тепловое реле, HL1 – сигнальная лампа, M – трехфазный асинхронный двигатель
Преобразование энергии
Асинхронный двигатель преобразует электрическую энергию подаваемую на обмотки статора, в механическую (вращение вала ротора). Но входная и выходная мощность не равны друг другу так как во время преобразования происходят потери энергии: на трение, нагрев, вихревые токи и потери на гистерезисе. Это энергия рассеивается как тепло. Поэтому асинхронный электродвигатель имеет вентилятор для охлаждения.
Реверсивная схема

L1, L2, L3 – контакты для подключения к сети трехфазного переменного тока, QF1 – автоматический выключатель, KM1, KM2 – магнитные пускатели, KK1 – тепловое реле, M – трехфазный асинхронный двигатель, SB1 – кнопка остановки, SB2 – кнопка пуска “вперед”, SB3 – кнопка пуска “назад” (реверс), HL1, HL2 – сигнальные лампы
Реферат: расчет асинхронного двигателя с короткозамкнутым ротором –
Федеральное агентство по образованию
Российский государственный профессионально-педагогический университет
Кафедра автоматизированных систем электроснабжения
Курсовой проект
Расчет асинхронного двигателя серии 4А180S4У3
Выполнил:
Проверил:
Екатеринбург 2008
Содержание
Задание 3
Введение 4
1. Выбор главных размеров 5
2. Определение Z1
, W1
и сечение провода обмотки статора 6
3. Расчет размеров зубцовой зоны статора и воздушного зазора 8
4. Расчет ротора 10
5. Расчет намагничивающего тока 14
6. Параметры рабочего режима 16
7. Расчет потерь 20
8. Расчет рабочих характеристик 22
9. Расчет пусковых характеристик 28
10. Тепловой расчет 35
11. Расчет вентиляции 37
Список литературы 38
Задание.
Курсовой проект по электрическим машинам
Тип машины – асинхронный двигатель 4А180S4У3
1. Номинальная мощность, 22 кВт
2. Номинальное фазное напряжение, 220 В
3. Число полюсов, 2р = 4
4. Степень защиты, IP44
5. Класс нагревостойкости изоляции, F
6. Кратность начального пускового момента, 1,4
7. Кратность начального пускового тока, 6,5
8. Коэффициент полезного действия, η = 0,9
9. Коэффициент мощности, cosφ = 0,9
10. Исполнение по форме монтажа, М 1001
11. Воздушный зазор, δ = 0,5 мм
12. Частота сети f1, 50 Гц
Введение
Асинхронный двигатель является преобразователем электрической энергии в механическую и составляет основу большинства механизмов использующихся во всех отраслях народного хозяйства.
В настоящее время асинхронные двигатели потребляют более 40% вырабатываемой электрической энергии, на их изготовление расходуется большое количество дефицитных материалов: обмоточные меди, изоляции, электрической стали и других затрат.
На ремонт и обслуживание асинхронных двигателей в эксплуатации средства составляют более 5% затрат из обслуживания всего установленного оборудования.
Поэтому создание серии высокоэкономичных и надежных асинхронных двигателей является важнейшей народно-хозяйственной задачей, а правильный выбор двигателей, их эксплуатации и высококачественный ремонт играют первоочередную роль в экономике материалов и трудовых ресурсов.
В серии 4А за счет применения новых электротехнических материалов и рациональной конструкции, мощность двигателей при данных высотах оси вращения повышена на 2-3 ступени по сравнения с мощностью двигателей серии А2, что дает большую экономию дефицитных материалов.
Серия имеет широкий ряд модификации, специализированных исполнений на максимальных удовлетворительных нужд электропривода.
1. Выбор главных размеров
1.1 Синхронная скорость вращения поля:
![]()
1.2 Высота оси вращения:
![]() ( двигатель 4А180S4У3)
( двигатель 4А180S4У3) ![]()
Внешний диаметр Da = 0,313 м ![]()
1.3 Внутренний диаметр статора:
![]()
![]()
1.4 Полюсное деление:
![]()
1.5 Расчетная мощность:

![]()
1.6 Электромагнитные нагрузки:
![]() A/м
A/м ![]()
![]() Тл
Тл ![]()
1.7 Принимаем обмоточный коэффициент для двухслойной обмотки:
![]()
1.8 Расчетная длина воздушного зазора:
![]()
![]()
1.9 Отношение ![]() значение
значение ![]() находится в рекомендуемых пределах (0,65-1,3)
находится в рекомендуемых пределах (0,65-1,3) ![]()
2. Определение ![]() ,
, ![]() и сечение провода обмотки статора
и сечение провода обмотки статора
2.1 Предельные значения ![]() :
:
![]()
2.2 Число пазов статора
![]()
![]()
Принимаем ![]() тогда
тогда ![]()
Обмотка двухслойная
2.3 Зубцовое деление статора
![]()
2.4 Число эффективных проводников в пазу (предварительно при условии а=1)
![]()
![]()
2.5 Принимаем а = 2, тогда
![]()
принимаем ![]()
2.6 Окончательные значения
Число витков в фазе:
![]()
Линейная нагрузка:
![]()
Магнитный поток:
![]()
Для двухслойной обмотки:
![]()
при ![]()
![]()
![]()
![]()
![]()
Значения А и ![]() находятся в допустимых пределах
находятся в допустимых пределах ![]()
2.7 Плотность тока в обмотке статора (предварительно) ![]()
по п. 2.6:
![]()
![]() =
=![]()
![]()
2.8 Сечение эффективного проводника (предварительно):
![]()
2.9 Сечение эффективного проводника (окончательно):
принимаем ![]() тогда
тогда ![]()
обмоточный провод ПЭТВ ![]() ,
,
![]()
![]()
![]()
2.10 Плотность тока в обмотке статора (окончательно):
![]()
3. Расчет размеров зубцовой зоны статора и воздушного зазора
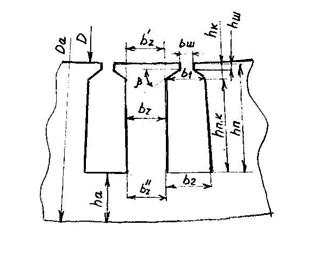
Рис.1 К расчету размеров зубцовой зоны статоров с прямоугольной конфигурацией пазов
3.1 Принимаем предварительно ![]()
![]() ;
; ![]()
![]() =
= ![]()
![]() для оксидированных листов стали
для оксидированных листов стали ![]()
![]() =
= ![]()
3.2 Размеры паза в штампе принимаем:
![]()
![]()
![]()
3.3 Размеры паза в свету с учетом припуска на cборку:
Площадь поперечного сечения паза «в свету» для размещения проводников:
![]()
Площадь поперечного сечения прокладок:
![]() (для двухслойной обмотки)
(для двухслойной обмотки)
Площадь поперечного сечения корпусной изоляции в пазу:
![]()
![]() – односторонняя толщина изоляции в пазу
– односторонняя толщина изоляции в пазу ![]()
3.4 Коэффициент заполнения паза:
![]()
Полученное значение ![]() допустимо для двигателей с
допустимо для двигателей с ![]() (0,72÷0,74).
(0,72÷0,74).
4. Расчет ротора
4.1 Воздушный зазор (по заданным данным):
![]()
4.2 Число пазов ротора ![]() :
:
![]()
4.3 Внешний диаметр ротора:
![]()
4.4 Длина магнитопровода ротора:
![]()
4.5 Зубцовое деление ротора:
![]()
4.6 Внутренний диаметр ротора равен диаметру вала, так как сердечник непосредственно насажен на вал.![]()
![]()
![]()
4.7 Ток в стержне ротора

![]()
4.8 Площадь поперечного сечения стержня (предварительно):
![]()
Плотность тока в стержне литой клетки принимаем:
![]()
![]()
4.9 Паз ротора определяем по рис.9.40, б ![]() :
:
Принимаем ![]()
Допустимая ширина зубца:
![]()
![]()
Размеры паза:
![]()
Принимаем: ![]()
Полная высота паза:![]()
![]()
4.10 Площадь поперечного сечения стержня:
4.11 Плотность тока в стержне:
![]()
4.12 Короткозамыкающие кольца.
Площадь поперечного сечения кольца:

![]()
Размеры замыкающих колец:
На рис.2 представлены размеры замыкающих колец
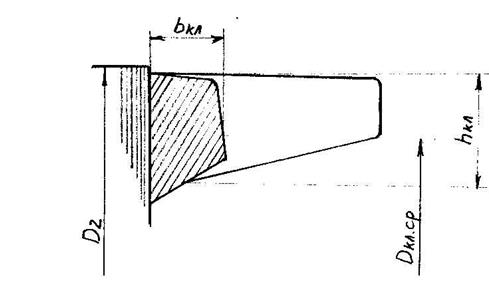
Рис.2 Размеры замыкающих колец
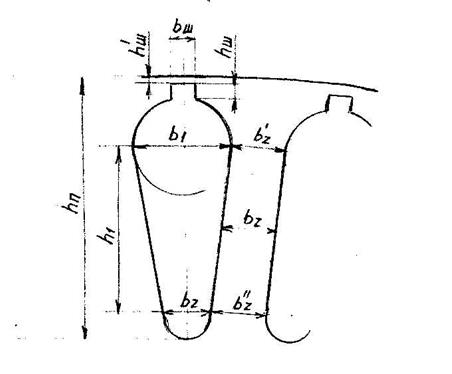
Рис.3 К расчету трапецеидальных закрытых пазов ротора
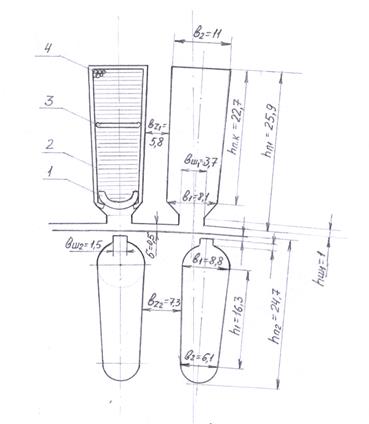
Рис.4 Пазы статора и ротора
Поз. | Материал | Толщина материала, мм | Число слоев | Односторонняя толщина, мм |
1 | Имидофлекс | 0,35 | 1 | 0,35 |
2 | Имидофлекс | 0,25 | 1 | 0,25 |
4 | Провод ПЭТВ 1,12/1,2 | – | – | – |
5. Расчет намагничивающего тока
5.1 Значение индукций:
Расчетная высота ярма ротора при 2р=4, ![]() :
:
![]()
5.2 Магнитное напряжение воздушного зазора:
5.3 Магнитные напряжение зубцовых зон:
статора: ![]()
ротора: ![]()
[ по табл. П1.7,1] для стали 2021:
при ВZ1
=1,9 Тл, НZ1
=2070 А/м;
при ВZ2
=1,9 Тл, НZ2
=2070 А/м;
hZ1
=hп1
=25,9 мм;
hZ2
=hп2
-0,1∙в2
=24,7-0,1∙6,1=24,1 мм
5.4 Коэффициент насыщения зубцовой зоны:
![]()
5.5 Магнитные напряжения ярм статора и ротора:

[по табл. П1.6, 1] при Ва
=1,55 Тл, НА
=630 А/м
при ВJ
=0,88 Тл, НJ
=146 А/м
![]()
где
![]()
при 2р=6 ![]() :
:
![]()
где
![]()
5.6 Магнитное напряжение на пару полюсов:
![]()
5.7 Коэффициент насыщения магнитной цепи:
![]()
5.8 Намагничивающий ток:
![]()
относительное значение:
![]()
6. Параметры рабочего напряжения
6.1 Активное сопротивление фазы обмотки статора:
![]()
Для класса нагревостойкости изоляции F расчетная температура ![]() =115˚С;
=115˚С;
Для медных проводников ![]()
Длина проводников фазы обмотки:
Длина вылета лобовой части катушки:
![]()
![]()
![]()
Относительное значение:
![]()
![]()
6.2 Активное сопротивление фазы алюминиевой обмотки ротора:
![]()
![]()

![]()
где для алюминиевой обмотки ротора:
![]()
Приводим r2
к числу витков обмотки статора:
![]()
Относительное значение:
![]()
6.3 Индуктивное сопротивление фазы обмотки статора:
где ![]()
где:


![]()
![]()
где:

![]()
Относительное значение:
![]()
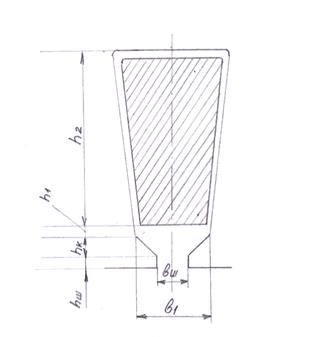
Рис.5 К расчету коэффициентов магнитной проводимости пазового рассеяния обмотки статора
6.4 Индуктивное сопротивление фазы обмотки ротора:
![]()
![]()
где по табл. 9.27 с. 408, 1:
где kд
=1 -для номинального режима
![]()

Так как ![]() то без заметной погрешности можно принять:
то без заметной погрешности можно принять:![]()
![]()
Приводим Х2
к числу витков статора:
![]()
Относительное значение:
![]()
Рис.6 К расчету коэффициентов магнитной проводимости пазового рассеяния короткозамкнутого ротора
7. Расчет потерь
7.1 Основные потери в стали:
![]() – удельная масса стали
– удельная масса стали
![]()
![]()
7.2 Поверхностные потери в роторе:
7.3 Пульсационные потери в зубцах ротора:
![]()
![]()
7.4 Сумма добавочных потерь в стали:
![]()
7.5 Полные потери в стали:
![]()
7.6 Механические потери:

![]() для двигателей с 2р ≥ 4:
для двигателей с 2р ≥ 4:
![]()
![]()
7.7 Добавочные потери при номинальном режиме:
![]()
7.8 Холостой ход двигателя:
![]()
![]()
![]()
![]()
![]()
8. Расчет рабочих характеристик
8.1 Параметры:
![]()
![]()
![]()
Используем приближенную формулу, так как :
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Потери , не меняющиеся при изменении скольжения:
![]()
Принимаем ![]() и рассчитываем рабочие характеристики,
и рассчитываем рабочие характеристики,
задаваясь скольжением S равным:
s=0,002; 0,008; 0,012; 0,016; 0,02; 0,024; 0,028
Результаты таблицы приведены в таблице 1.
Характеристики представлены на рис.7
№ | Расчетная формула | Единица измерения | Скольжение | ||||||
0,002 | 0,008 | 0,012 | 0,016 | 0,02 | Sном= 0,024 | 0,028 | |||
1. |
| Ом | 67,86 | 16,96 | 11,31 | 8,48 | 6,78 | 5,65 | 4,84 |
2. |
| Ом | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
3. |
| Ом | 68,06 | 17,16 | 11,51 | 8,68 | 6,98 | 5,85 | 5,04 |
4. |
| Ом | 1,2 | 1,2 | 1,2 | 1,2 | 1,2 | 1,2 | 1,2 |
5. |
| Ом | 68,07 | 17,2 | 11,57 | 8,76 | 7,08 | 5,97 | 5,18 |
6. |
| А | 3,23 | 12,79 | 19,01 | 25,1 | 31,07 | 36,85 | 42,47 |
7. |
| – | 0,999 | 0,997 | 0,994 | 0,99 | 0,985 | 0,979 | 0,973 |
8. |
| – | 0,017 | 0,069 | 0,103 | 0,136 | 0,169 | 0,2 | 0,231 |
9. |
| А | 4,88 | 13,41 | 19,55 | 25,51 | 31,26 | 36,73 | 41,98 |
10. |
| А | 10,25 | 11,08 | 12,15 | 13,61 | 15,45 | 17,57 | 20,0 |
11. |
| А | 11,35 | 17,39 | 23,01 | 28,91 | 34,86 | 40,7 | 46,5 |
12. |
| А | 3,3 | 13,06 | 19,42 | 25,64 | 31,74 | 37,6 | 43,39 |
13. |
| кВт | 3,22 | 8,85 | 12,9 | 16,83 | 20,63 | 24,242 | 27,7 |
14. |
| кВт | 0,075 | 0,176 | 0,308 | 0,486 | 0,707 | 0,964 | 1,258 |
15. |
| кВт | 0,004 | 0,066 | 0,147 | 0,256 | 0,392 | 0,55 | 0,734 |
16. |
| кВт | 0,009 | 0,021 | 0,038 | 0,06 | 0,087 | 0,119 | 0,156 |
17. |
| кВт | 0,752 | 0,927 | 1,157 | 1,466 | 1,85 | 2,297 | 2,812 |
18. |
| кВт | 2,468 | 7,923 | 11,74 | 15,36 | 18,78 | 21,944 | 24,888 |
19. |
| – | 0,76 | 0,89 | 0,91 | 0,912 | 0,91 | 0,905 | 0,898 |
20. |
| – | 0,429 | 0,771 | 0,849 | 0,882 | 0,896 | 0,902 | 0,902 |
Таблица 1. Рабочие характеристики асинхронного двигателя
![]()
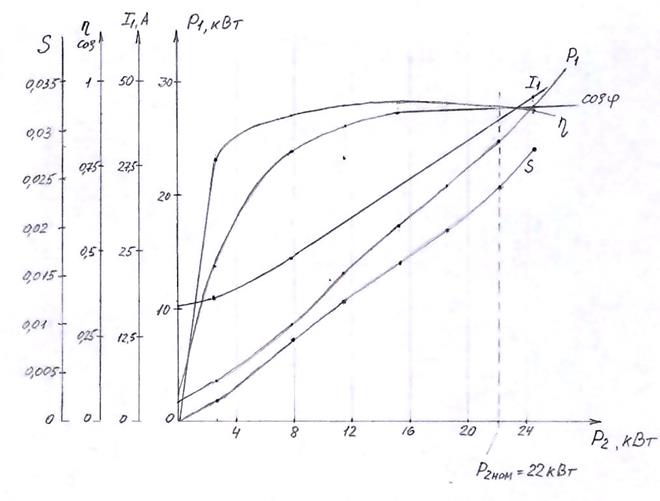
Рис.7 Рабочие характеристики спроектированного двигателя
8.2 Расчет и построение круговой диаграммы.
![]()
Масштаб тока:
![]()
Масштаб мощности:
![]()
Ток синхронного холостого хода :
![]()
![]()
![]()
![]()
![]()
![]()
где ![]()
![]()
8.3 После построения круговой диаграммы рассчитаем рабочие характеристики при номинальном режиме
Ток статора:
![]()
Ток ротора:
![]()
Первичная мощность:
![]()
Электромагнитная мощность:
![]()
Полезная мощность:
![]()
КПД:
Коэффициент мощности:
![]()
Скольжение двигателя:
9. Расчет пусковых характеристик
9.1 Расчет пусковых характеристик. Рассчитываем точки характеристик,
соответствующие скольжению S = 1.
Пусковые характеристики спроектированного двигателя представлены на рис.8.
Параметры с учетом вытеснения тока (![]() )
)
![]()
![]()
Для ![]() [стр. 428, рис. 9.57, 1]
[стр. 428, рис. 9.57, 1]
![]() [стр.428, рис. 9.58, 1]
[стр.428, рис. 9.58, 1]
Активное сопротивление обмотки ротора:
![]()
где ![]()
![]()
![]()
Приведенное сопротивление ротора с учетом действия эффекта вытеснения тока:
![]()
9.2 Индуктивное сопротивление обмотки ротора с учетом действия эффекта вытеснения тока:
![]()

![]()
![]()
9.4 Пусковые параметры
9.5 Расчет токов с учетом влияния эффекта вытеснения тока для ![]() :
:


9.3 Учет влияния насыщения на параметры. Принимаем для S=1 коэффициент насыщения
![]() и
и ![]()
[по рис. 9.61, с.432, 1 для ![]() ]
]
Коэффициент магнитной проводимости пазового рассеяния обмотки статора с учетом влияния насыщения:

Коэффициент магнитной проводимости дифференциального рассеяния обмотки статора с учетом влияния насыщения:
![]()
Индуктивное сопротивление фазы обмотки статора с учетом влияния насыщения:
![]() где
где
![]()
Коэффициент магнитной проводимости пазового рассеяния ротора с учетом влияния насыщения и вытеснения тока:
Для закрытых пазов ротора: ![]()
Коэффициент магнитной проводимости дифференциального рассеяния обмотки ротора с учетом влияния насыщения:
![]()
Приведенное индуктивное сопротивление фазы обмотки ротора с учетом влияния вытеснения тока и насыщения:
![]() где
где
![]()
![]()
Расчет токов и моментов:



Критическое скольжение определяем после расчета всех точек пусковых характеристик (табл. 3) по средним значениям сопротивлений ![]()
![]() , соответствующим скольжениям
, соответствующим скольжениям ![]() :
:
Таблица 2. Расчет токов в пусковом режиме асинхронного двигателя с короткозамкнутым ротором с учетом влияния эффекта вытеснения тока
![]()
№ | Расчетная формула | Размерность | Скольжение | |||||
1 | 0,8 | 0,5 | 0,2 | 0,1 |
| |||
1. |
| – | 1,5 | 1,35 | 1,06 | 0,67 | 0,47 | 0,557 |
2. |
| – | 0,33 | 0,23 | 0,11 | 0,02 | 0,005 | 0,01 |
3. |
| мм | 17,8 | 19,2 | 21,3 | 23,23 | 23,58 | 23,46 |
4. |
| – | 1,24 | 1,15 | 1 | 1 | 1 | 1 |
5. |
| – | 1,16 | 1,098 | 1 | 1 | 1 | 1 |
6. |
| Ом | 0,15 | 0,16 | 0,13 | 0,13 | 0,13 | 0,13 |
7. |
| – | 0,87 | 0,92 | 0,95 | 0,975 | 0,985 | 0,98 |
8. |
| – | 2,86 | 2,91 | 2,94 | 2,973 | 2,984 | 2,979 |
9. |
| – | 0,97 | 0,985 | 0,99 | 0,995 | 0,997 | 0,996 |
10. |
| Ом | 0,68 | 0,689 | 0,693 | 0,696 | 0,698 | 0,697 |
11. |
| Ом | 0,34 | 0,396 | 0,457 | 0,853 | 1,51 | 1,156 |
12. |
| Ом | 1,14 | 1,158 | 1,162 | 1,165 | 1,167 | 1,166 |
13. |
| А | 186,4 | 179,7 | 176,1 | 152,3 | 115,3 | 134 |
14. |
| А | 190,5 | 183,8 | 180,1 | 155,8 | 118,1 | 137,2 |
Для расчета других точек характеристики зададимся ![]() , уменьшенным в зависимости от тока
, уменьшенным в зависимости от тока ![]() (см.табл. 2):
(см.табл. 2):
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Таблица 3. Расчет пусковых характеристик асинхронного двигателя с короткозамкнутым ротором с учетом эффекта вытеснения тока и насыщения от полей рассеяния
![]()
№ | Расчетная формула | Размерность | Скольжение | |||||
1 | 0,8 | 0,5 | 0,2 | 0,1 |
| |||
1. |
| – | 1,4 | 1,3 | 1,2 | 1,1 | 1,05 | 1,069 |
2. |
| А | 4175 | 3740 | 3383 | 2682 | 1941 | 2295 |
3. |
| Тл | 5,6 | 4,97 | 4,5 | 3,56 | 2,58 | 3,05 |
4. |
| – | 0,42 | 0,48 | 0,52 | 0,64 | 0,79 | 0,72 |
5. |
| мм | 5,6 | 5 | 4,6 | 3,5 | 2 | 2,7 |
6. |
| – | 1,09 | 1,108 | 1,121 | 1,162 | 1,237 | 1,198 |
7. |
| – | 0,69 | 0,792 | 0,858 | 1,056 | 1,303 | 1,188 |
8. |
| Ом | 0,32 | 0,335 | 0,344 | 0,37 | 0,404 | 0,388 |
9. |
| – | 1,0102 | 1,0107 | 1,011 | 1,0118 | 1,0129 | 1,012 |
10. |
| мм | 8,9 | 8 | 7,4 | 5,5 | 3,2 | 4,3 |
11. |
| – | 2,29 | 2,348 | 2,385 | 2,449 | 2,53 | 2,484 |
12. |
| – | 0,97 | 1,113 | 1,206 | 1,484 | 1,832 | 1,67 |
13. |
| Ом | 0,45 | 0,483 | 0,498 | 0,537 | 0,587 | 0,563 |
14. |
| Ом | 0,34 | 0,396 | 0,456 | 0,85 | 1,508 | 1,154 |
15. |
| Ом | 0,77 | 0,823 | 0,847 | 0,913 | 0,998 | 0,957 |
| А | 261,9 | 241 | 228,7 | 176,4 | 121,7 | 146,7 | |
| А | 265,7 | 244,7 | 232,4 | 179,5 | 124,1 | 149 | |
| – | 1,39 | 1,33 | 1,29 | 1,15 | 1,05 | 1,086 | |
| – | 6,52 | 6,1 | 5,74 | 4,54 | 3,15 | 3,66 | |
| – | 1,35 | 1,39 | 1,77 | 2,64 | 2,51 | 2,66 | |
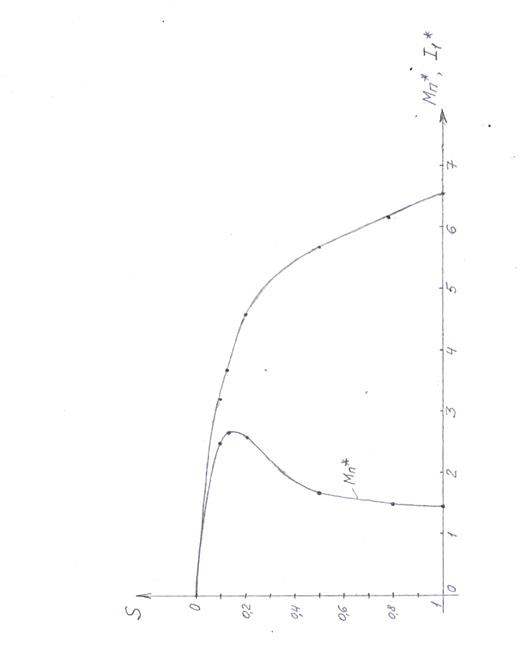
Рис. 8 Пусковые характеристики
10. Тепловой расчет
10.1 Превышение температуры внутренней поверхности сердечника статора над температурой воздуха внутри двигателя.
![]()
![]()
![]()
10.2 Перепад температуры в изоляции пазовой части обмотки статора:
где ![]()

10.3 Перепад температуры по толщине изоляции лобовых частей:

10.4 Повышение температуры наружной поверхности лобовых частей над температурой воздуха внутри машины:
![]()
10.5 Среднее превышение температуры обмотки статора над температурой воздуха внутри машины:
10.6 Превышение температуры воздуха внутри машины над температурой окружающей среды:
![]()
Среднее превышение температуры обмотки статора над температурой окружающей среды:
![]()
11. Расчет вентиляции
11.1 Расчет вентиляции, требуемый для охлаждение расходов воздуха:
Расход воздуха, обеспечиваемый наружным вентилятором:

Список литературы
1. Проектирование электрических машин: Учеб. для вузов / П79 И.П. Копылов, Б.К. Клоков, В.П. Морозкин, Б.Ф. Токарев; Под ред. И.П. Копылова. – 3-е изд., испр. и доп. – М.: Высш.шк., 2002. – 757 с.: ил.
2. Методические указания к выполнению курсового проекта по электрическим машинам. №11, 1990г. (№128, 1984).
Выводы
На сегодняшний день уже существует множество методов диагностики состояния асинхронного двигателя в процессе его эксплуатации. Все они до сих пор совершенствуются, что подтверждает их актуальность и практическую работоспособность.
В данной работе были рассмотрены наиболее известные из них, и выделено, что наиболее перспективными для практической реализации являются методы диагностики асинхронного двигателя, основанные на анализе электрических параметров двигателя, а именно спектров напряжений и токов. А также выдвинуто требование к частоте дискретизации измерительных каналов для этого метода.
Дальнейшие исследования направлены на следующие аспекты:
- Выбор оптимальной структуры схемы практической реализации метода диагностики асинхронного двигателя;
- Расчет и выбор необходимого оборудования;
- Представление рабочей схемы для практической реализации диагностики асинхронного двигателя в процессе его эксплуатации.
На момент написания данного реферата магистерская работа еще не завершена. Ориентировочная дата завершения магистерской работы: июнь 2021 года. Полный текст работы и материалы по теме могут быть получены у автора или его руководителя после указанной даты.





