

Змановская е.в. девиантология: (психология отклоняющегося поведения)
нормы.Или,по-другому,«этообщееназваниеконкретныхнозологическихединиц»,т.е.то,чтоточно
соответствуетодномуизслучаев,перечисленныхвклассификацииболезнейиихпризнаков[14,т.3,с.
302].
Вклассификацииболезнейдевиантноеповедениеневыделеновкачествеотдельной
нозологическойединицы,следовательно,ононеявляетсяниформойпатологии,нистрогоопределенным
медицинскимпонятием.Втожевремядевиантноеповедениеширокорассматриваетсяврядуявлений,
лежащих между нормой и патологией, таких, как акцентуации характера, ситуативные реакции, нарушения
развития,предболезнь.Перечисленныеформыхарактеризуютсясложностью,сочетаннымхарактером
проблеминеопределенностьюдиагностическихпризнаков.Например,«акцентуациихарактера–это
крайниевариантыегонормы,прикоторыхотдельныечертычрезмерноусилены,отчегообнаруживается
избирательная уязвимость в отношении определенного рода психогенных воздействий при хорошей и даже
повышеннойустойчивостикдругим»[10,с.10].Известно,чтоакцентуацииврядеслучаевсочетаютсяс
отклоняющимся поведением, таким, как противоправные действия, суицидальное поведение, употребление
наркотиков.Втожевремяповедениемногихлюдейсакцентуированнымхарактеромнеявляется
отклоняющимся. ПомнениюК.Леон-гарда,вразвитыхстранахприблизительно50%населенияотносится
какцентуированнымличностям[11,с.19].Приэтомбольшаячастьизнихпроявляетнормальное
поведение и даже имеет особые заслуги перед обществом.
Аналогично, любое расстройство из области психической патологии (психопатии, неврозы, психозы
и т.д.) неоднозначно связано с отклоняющимся поведением. В некоторых случаях психические заболевания
могутсопровождатьсяповеденческими нарушениями,вызываяпатогенную дезадаптацию.Вдругих
случаях психических расстройств поведенческие девиации отсутствуют.
Следующий,социально-нормативный,критерийимеетчрезвычайноважноезначениевразличных
областяхобщественнойжизни.Поведениекаждогочеловекаежедневнооцениваетсяирегулируетсяс
помощьюразнообразныхсоциальныхнорм.(Понятиесоциальнойнормы,еевидыимеханизмыдействия
будутраскрытывследующейглаве.)Всоответствииссоциально-нормативнымкритериемповедение,
соответствующеетребованиямобществавданноевремя,воспринимаетсякакнормальноеиодобряется.
Отклоняющееся поведение, напротив, противоречит основным общественным установкам и ценностям.
Сизменениемсамогообществаизменяютсяисоциальныенормы,действующиевнем.Например,
советскоегосударствокультивировалотакиекачества«строителякоммунизма»,какчувствоДолга,
идейная преданность,коллективнаяответственность, унитарноемышление.Со времен перестройки
важную роль стали играть личная инициатива, самостоятельность, гибкость.
Сточкизрениясоциально-нормативногокритерияведущимпоказателемнормальностиповедения
являетсяуровеньсоциальнойадаптацииличности.Приэтомнормальная,успешнаяадаптация
характеризуетсяоптимальнымравновесиеммеждуценностями,особенностямииндивидаиправилами,
требованиямиокружающейегосоциальнойсреды.Следовательно,одинаковопроблемнымиявляютсякак
выраженноеигнорированиесоциальныхтребований,такинивелированиеиндивидуальности,напримерв
форме конформизма – полного подчинения интересов личности давлению среды. Соответственно,
дезадаптация–этосостояниесниженнойспособности(нежелания,неумения)приниматьивыполнять
требованиясредыкакличностнозначимые,атакжереализовыватьсвоюиндивидуальностьвконкретных
социальных условиях.
Можновыделитьсоциальныеииндивидуальныепроявлениядезадаптации.Социальными
проявлениями дезадаптации являются:
сниженная обучаемость, неспособность зарабатывать своим трудом;
хроническая или выраженная неуспешность в жизненно важных сферах (семье, работе,
межличностных отношениях, сексе, здоровье);
конфликты с законом;
изоляция.
В качестве индивидуальных проявлений дезадаптации могут рассматриваться:
негативная внутренняя установкапо отношению ксоциальным требованиям (несогласие с ними,
непонимание, протест, оппозиция);
завышенныепретензиикокружающимпристремлениисамомуизбегатьответственности,
эгоцентризм;
хронический эмоциональный дискомфорт;
неэффективность саморегуляции;
конфликтность и слабая развитость коммуникативных умений;
когнитивные искажения реальности.
Человекможетпереживатьразличныечувства–отлегкойтревогиинеуверенностивсебедо
невыносимыхаффектовбеспомощности,страха,отчаяния.Приэтомвозможнырасхождениямежду
реальным социальным статусом личности и его индивидуальным осознанием.
§
каквсмыслесредней,такиидеальной.Неповторимостьчеловеческойличностиобнаруживаетсвой
внутренний смысл в той роли, которую она играет в целостном сообществе» [18, с. 197].
Благодаря вкладу гуманистической психологии, наши представления о развитии личности вышли за
границыпроцессасоциальнойадаптации.Онисущественнопополнилисьтакимважнымпроцессом,как
индивидуация.Последняявключаетпознание,принятие,развитиеиреализациюсвоейиндивидуальности.
ПотеорииК.Роджерсауздоровойличностидоминируетустановканапроцесссамоактуализации–
актуализацииврожденногостремлениячеловекакростуиразвитиюсвоейличностивсоответствиистем,
какой она является по своей природе и возможностям [15].
Следуяустановкамгуманистическойпсихологии,Б.С.Братусьописываетнормальноеразвитие
человекакакразвитие,котороеведетегокобретениюродовойчеловеческойсущности.Человеческая
сущностьпроявляетсявследующиххарактеристиках:отношениикдругомучеловекукаксамоценности,
способности к любви и творчеству, целетворящем характере жизнедеятельности, потребности в позитивной
свободе (не от чего-то, адля чего-то), способности к свободе волепроявления, внутренней ответственности
передсобойидругими,обретениисмыслажизни.Развитиеспротивоположнымипроявлениямибудет
аномальным [3].
Другойподходрассматриваетуспешноеразвитиесквозьпризмуинтрапсихическиххарактеристик.
Например, К. Юнг описывал нормальную личность с точки зрения интегрированной самости, т. е. личности
какцелого.Интегрированнаясамостьотличаетсяравновесиеммеждусознательнымибессознательным,
адекватностьюценностейличностиобъективнымусловиямжизни,согласиемссамимсобой,
самоосуществлением [22].
В психоанализенормальное развитиепредполагает достижениеоптимального равновесия между Я,
Оно, Сверх-Я и силами внешнего мира. Психологическое равновесие всегда нестабильно. И все же в норме
Ядолжнобытьдостаточносильным,чтобысправлятьсястребованиямиОно,сжесткостьюСверх-Я,с
жизненными фрустрациями и тревогой [21].
Мывидим,чтовозможнысамыеразличныеподходыкопределениюкакпсихологической,таки
социальной нормы вообще.
Виды социальных норм и механизмы их регулирования
Социальные нормы могут иметь разнообразные формы и содержание. Нормы могут быть
формализованы–записаныввидезаконов,правил,инструкций.Ногораздочащеонисуществуютвтаких
формахобщественногосознания,какнародныетрадиции,социальныеустановки,общественноемнение.
Различные виды норм тесно взаимосвязаны.
Посферерегулируемыхотношенийвыделяютследующиеосновныегруппысоциальныхнорм:
духовно-нравственные, морально-этические, правовые, политические, организационно-профессиональные.
Носителяминравственных(духовных)нормвыступаютсамилюди,атакжетакиесоциальные
институты,каксемья,религиозныеконфессии,общественныеорганизации.Духовно-нравственныенормы
существуютвразличныхформах.Этопреждевсегообщечеловеческиеценности,представленныев
мировыхрелигиях,художественнойкультуреинаучноймысли.Такжеэтонародныетрадициииобычаи,
международные конвенции и декларации.
Мыможемрассмотретьсоциально-психологическиемеханизмыдействиянравственныхнормна
примерехристианства.ЧеловекприобщаетсякхристианскимценностямчерезОбразы–Бога,егосына,
святых. Притчи, жизнеописания Христа и святых – достойные образцы для подражания верующих людей.
Другимиважнымиспособамивоспитаниянравственныхчувствхристианинаявляютсяпонятия
грехаидобродетели.Идеягреховности(беззакония)человекаинеобходимостипротивостоятьейдля
спасения души ичеловечества – всеэто становитсятемой для размышлений и художественноготворчества
ужевСредневековье.ЗнаменитоеполотнонидерландскогохудожникаБосха(XVв.),изображающеесемь
смертныхгреховвсегментахвсевидящегоБожьегоока,непотерялоактуальностиипосейдень.Эти
смертныегрехи–чревоугодие,алчность,лень,зависть,гнев,гордыня,похоть.Христианствопризнает
греховнымиидругиедействия,например,такие,какклятвопреступление,осуждениеближнего,гаданиеи
колдовство, пристрастие к курению, пьянство, принятие на себя чужих грехов.
Добродетель,напротив,определяетсяверойиследованиемБожьимзаконам.Библейскиезаповеди
нетолькораскрываютБожьизаконы,ноиявляютсяпрямымипредписаниямидляповеденияхристиан.
ПозднийвариантВетхозаветногодекалогасодержит10заповедей,ставшихосновойнравственного
сознания миллионов людей. Эти заповеди: поклоняйся одному Богу;не сотвори себекумира; не произноси
имениБоганапрасно;соблюдайденьсубботний;почитайотца имать;неубивай;непрелюбодействуй;не
кради;непроизносиложногосвидетельства;нежелайженыближнегосвоего,нидомаего,ниполя[2,
Исход,Гл.20].ВНагорнойпроповедиИисус,обращаяськветхозаветнымзаповедям,наставляетлюдей
радиихспасения:«Любитевраговваших,благословляйтепроклинающихвас,благотворитененавидящим
васимолитесьзаобижающихвасигонящихвас…Будьтесовершенны,каксовершененотецваш
Небесный» [2, Евангелие от Матфея, Гл. 5].
§
средствамиихдостиженияможетпривестиканомическомунапряжению,фрустрацииипоиску
незаконных способов адаптации. Данное обстоятельство отчасти объясняет относительно высокий
уровень преступности среди низших социальных слоев.
Другимиобъективнымифакторамисоциальныхдевиацийпризнаются:различиямежду
участниками социального взаимодействия иневыполнение ожиданий (Т. Парсонса);несоответствие между
распределением благиличнымикачествамилюдей(П.Сорокин);влияниенормдевиантной субкультурыи
обучения(Р.Клауорд,Л.Оулин).Так,личность,сраннегодетствапомещеннаявдевиантнуюсубкультуру
(криминальную,конфликтнуюилиретристскую),сбольшойвероятностьюбудетпроявлять
соответствующие формы девиантного поведения.
Влияниесовременныхсубкультурна девиантное поведение личности являетсячрезвычайно
важным,хотяинедостаточноизученнымвопросом.Втожевремяхорошоизвестно,чтоличностьвсегда
включенавкакую-либосоциальнуюгруппу.Врядеслучаевгрупповыепотребностидоминируют–быть
включеннымвгруппу,следоватьеенормам,подражатьееучастникам,противопоставлятьсебядругим
группам.Наэтойпочвевырастаютсамыеразнообразныесубкультуры–аристократическаяэлита,хиппи,
металлисты, рокеры, геи, скинхэды и т.д. Люди склонны идентифицироваться с групповыми лидерами и их
идеалами(втомчиследеструктивными),чтовомногомобъясняетсуществованиетакихмассовых
девиаций, как геноцид, расизм, фашизм.
Другим очевидным пробелом можноназватьнеясностьсвязи«профессия–девиантноеповедение».
Профессиональнаясредаоказываетсущественноевоздействиеналичностьчеловека.Хорошоизвестны
такиенегативныефеномены,какпрофессиональныйстресс,профессиональное«выгорание»и
профессиональнаядеформацияличности.Темнеменеепубликаций,посвященныхпроблемевлияния
профессии на девиантное поведение личности, практически нет.
Нарядусрассмотреннымиобъективнымисоциальнымифакторамидействуютитакназываемые
субъективныепричиныдевиантногоповедения.Всоответствиистеориейстигма-тизации(Э.Лемерт,Г.
Беккер) девиации –следствие того,что самообщество (вернее, социальная группа)наклеивает на личность
соответствующиеярлыкипутемсоотнесениядействийконкретногочеловекасабстрактнымиправилами
(первичнаядевиантность).Постепенноформируетсярепутация,котораявынуждаетиндивида
придерживаться девиантной роли (вторичная девиантность) [9, с. 13].
И.Гофманвыделяеттритипастигмы:физическаястигма(врожденныеаномалииителесные
увечья); дефекты воли (алкоголизм, наркомания, душевные болезни); расовые стигмы («черные») [9, с. 14].
Сазерлендв1939г.сформулировалтеориюдифференцированнойассоциации;всоответствиис
которой девиантноеповедение– сложнаяи дифференцированнаяформа поведения. Емуучатся в
интеракции(взаимодействии).Этотпроцессвключаетусвоениедевиантноймотивации,оправданияи
техник реализаций девиантного поведения.
Девиантноеповедениетакжеможетбытьописаноспомощьюпонятия«социальнаяроль»,или
«социальная функция личности» (Дж. Мид, М. Дойч, Р. Краусс)..Роль – это система ожиданий относительно
поведениячеловека,представлениечеловекаомоделисобственногоповедения,наконец,поведение
сообразносзанимаемымположением–статусом.Всоответствиисэтимлюдимогутприниматьнасебя
различные роли, в том числе роль девианта.
Наконец,субъективнойпричинойотклоняющегосяповеденияможетстатьотношениесамой
личности(группы)ксоциальнымнормам(Г.Сайк,Д.Матза).Например,чтобыосвободитьсяот
моральныхтребованийиоправдатьсебя,человекможет«нейтрализовать»действиенормследующими
способами:ссылатьсянавысшиепонятия(дружбу,преданностьгруппе);отрицатьналичиежертвы;
оправдыватьсвоеповедениедевиантностьюжертвыилипровокациейсеестороны;отрицатьсвою
ответственность; отрицать вред своего поведения [9, с. 15].
Современный отечественныйисследовательЮ.А.Клейбергнапримереподростковойдевиантности
также раскрывает девиантное поведение через отношение личности к культурным нормам. Отклоняющееся
поведение –это«специфический способизменениясоциальныхнорми ожиданийпосредством
демонстрации личностью ценностного отношения к ним» [9, с. 17]. Для этого используются особые приемы
– слэнг, символика, мода, манера, поступок и т.д. Девиантные действия подростков выступают как средство
достижения значимой дели, самоутверждения и разрядки.
Такимобразом,социологическиеиблизкиекнимсоциально-психологическиетеории
рассматриваютдевиантноеповедениекакрезультатсоциальныхпроцессов,сложныхвзаимоотношений
междуобществомиконкретнойличностью.Соднойстороны,мывидим,чтовсамомобществеимеются
серьезныепричиныдляотклоняющегосяповедения,напримерсоциальнаядезорганизацияисоциальное
неравенство. С другойстороны,мызакономерно приходим кпониманию роли индивидуальности
конкретного человека в процессе социализации его личности.
Социологическиетеориинеобъясняют,почемуводнихитехжесоциальныхусловияхразличные
люди демонстрируют принципиально разное поведение, например далеко не всепредставители беднейших
Рисунок 1.13 – типы контактов
1
– основание; 2
– неподвижный контакт; 3
– подвижный контакт; 4
– упор
Рисунок 1.14 Рычажный контактный узел
Применяется также мостиковый контактный узел, в котором размыкание цепи происходит на двух контактах, рисунок 1.15. мостиковый контактный узел обеспечивает разрыв электрической цепи в двух местах, что повышает надежность работы. В более мощных реле используют контактный узел с шарнирным креплением подвижного контакта, рисунок 1.16.
а
– разомкнутый; б
– замкнутый; 1
– упор; 2
– пружина сжатия контактов; 3
– мостик с подвижными контактами; 4
– неподвижные контакты
Рисунок 1.15 Мостиковый контактный узел
а
– разомкнутый; б
– замкнутый; 1
– рычаг; 2
– подвижный контакт; 3
– неподвижный контакт; 4
– пружина; O1
– ось поворота рычага
Рисунок 1.16 Рычажный контактный узел с перекатывающимися контактами
При замыкании и размыкании контактов на них может возникать искровой или дуговой разряд. Особенно велика возможность возникновения разряда при коммутации цепей, содержащих индуктивность и емкость. При этом возрастает износ контактных поверхностей. Наибольшее разрушение контактов происходит при возникновении электрической дуги.
Износ обусловлен бомбардировкой положительного контакта электронами, вырываемыми электрическим полем дуги с отрицательного контакта, который при этом разрушается, а также за счет термического действия дуги. Кроме того, появление искры или электрической дуги между контактами создает радиопомехи и может привести к ложному срабатыванию различных цепей в автоматических системах.
Для снижения возможности возникновения искры или дуги, а также их гашения применяют специальные схемы, основанные на шунтировании нагрузки или контактов последовательным соединением резистора с емкостью или цепочки с диодом (если коммутируется цепь постоянной полярности).
а
– шунтирование нагрузки е6мкостью и сопротивлением; б
– шунтирование нагрузки диодом; в
– шунтирование контактов
Рисунок 1.17 – Схемы гашения искры
На рисунке 1.17 приведены некоторые из схем гашения искры. В схемах, представленных на рисунке 1.17, а
, б
, при размыкании контактов К
накопленная в нагрузке Zн
энергия расходуется в замкнутом контуре.
Значения сопротивления R и емкости С
выбирают такими, чтобы не возникали колебания в образовавшемся контуре LC
. Для этого используются конденсаторы емкостью С
= 0,1 ÷ 1 мкФ и резисторы R
= 50 ÷ 100 Ом.
В схеме, представленной на 1.17, в
, RC
-цепь шунтирует контакты К
реле, в результате чего при их размыкании энергия индуктивной нагрузки Zн
в большей ее части проходит через шунтирующую цепь.
При выборе материала контактов необходимо обеспечить выполнение целого ряда требований: большая механическая прочность, высокая температура плавления, хорошие теплопроводность и электропроводность, устойчивость против коррозии и эрозии.
Перечисленным выше требованиям в наибольшей степени удовлетворяют серебро, золото, платина, медь и их сплавы, а также вольфрам, таблица 1.
Таблица 1.1 – Материалы для контактов
Материалы | Плотность, г/см3 | Твердость по Виккерсу | Точка плавления, ° | Удельное сопротивление, Ом·см·106 | Теплопроводность,Вт/см· с·град |
Серебро | 10,5 | 26 | 960 | 1.6 | 4,186 |
Платина | 21,3 | 65 | 1770 | 11,6 | 0,71 |
Палладий | 11,9 | 40 | 1554 | 10,7 | 0,71 |
Золото | 19,3 | 20 | 1063 | 2,4 | 2,92 |
Серебро-золото (10%) | 11,4 | 29 | 965 | 3.6 | 1,98 |
Серебро-палладий(10%) | 10,6 | 40 | 1000 | 6,8 | 1,46 |
Серебро-медь (10%) | 10,3 | 62 | 778 | 2.0 | 3,42 |
Платина-иридий (20%) | 21,6 | 120 | 1780 | 24,5 | 0,3 |
Платина-серебро (40%) | 11,0 | 95 | 1290 | 35,8 | 0,312 |
Золото-серебро(30%) | 16,6 | 32 | 1025 | 10.4 | 0,667 |
Сопротивление контактного перехода определяется по формуле
где а
– коэффициент, зависящий от материала и обработки поверхности контакта; F
– контактное усилие; b
–коэффициент формы контактов.
Для точечных контактов b
≈ 0,5; для линейных b
≈ 0,55 ÷ 0,7; для плоскостных b
≈ 1,0.
Коэффициент а
для меди лежит в пределах от 0,07 до 0,28. Наименьшее значение a
(и соответственно сопротивления Rк
) обеспечиваются при покрытии меди слоем олова (лужение). Слой олова препятствует образованию оксида, поэтому для луженных медных контактов коэффициент a
< 0,1.
Для малых контактных усилий в высокочувствительных реле применяются благородные металлы (платина, золото, платинородий) при контактных усилиях F
= 0,01 ÷ 0,05 Н. Эти материалы не окисляются и мало подвержены эрозии. При контактных усилиях F
= 0,05 ÷ 1 Н и малой частоте срабатывания применяется серебро, которое имеет хорошую электропроводность, легко обрабатывается, но имеет невысокую твердость и подвержено эрозии.
При контактных усилиях F
= 0,3 ÷ 1 Н и большой частоте срабатывания используются металлокерамические контакты, получаемые методами порошковой металлургии (путем спекания смеси порошков двух металлов: серебра с вольфрамом, молибденом или никелем, меди с вольфрамом и молибденом). При контактных усилиях F
> 1 Н и большой частоте срабатывания применяется вольфрам.
Наиболее дешевым материалом является медь, которая применяется для мощных контактов, имеющих сравнительно большие размеры и требующих большого расхода материала. Контактные усилия для меди F
> 3 Н. Для защиты от коррозии кроме лужения применяется серебрение или кадмирование медных контактов.
Поляризованными называют электромагнитное реле, у которого направление перемещения якоря зависит от направления тока в катушке реле, т.е. полярности входного напряжения, что достигается взаимодействием двух магнитных потоков: рабочего Фр
, образованного катушкой, и поляризованного Ф0
, создаваемого постоянным магнитом. Магнитопроводы поляризованных реле конструируются по дифференциальной или мостовой схеме.
Поляризованное реле с дифференциальной схемой представлено на рисунке 1.18, а
. Постоянный магнитный поток Ф0
от постоянного магнита 5
в этом реле разветвляется в магнитопроводе на два потока: Ф1
и Ф2
.
Реле имеет две одинаковые рабочие обмотки 4
и 7
, соединенные последовательно. При симметричном положении якоря значения потоков Ф1
в воздушном зазоре δ1
и Ф2
в воздушном зазоре δ2
одинаковы.
В зависимости от полярности подводимого напряжения в одном воздушном зазоре, например δ2
, результирующий ток увеличивается: Фδ2
= Ф2
Фр
, а в другом, δ1
, – уменьшается: Фδ1
= Ф1
Фр
.
При подачи на рабочие обмотки напряжения другой полярности увеличивается результирующий поток в зазоре δ1
и уменьшается в зазоре δ2
. Якорь реле перебрасывается влево, замыкая тем самым контакты 1
и 2
. поляризованное реле с мостовой схемой магнитопровода представлено на рисунке 1.18,б
.
Принцип действия поляризованных реле с мостовыми схемами магнитопровода аналогичен принципу действия реле с дифференциальной схемой. Однако в связи с тем, при мостовой схеме магнитопровода магнитная цепь для потока Фр
рабочей обмотки выполнена отдельно от цепей Ф1
Ф2
потоков, создаваемых постоянным магнитом, поляризованные реле с мостовыми схемами магнитопроводов имеют более высокую стабильность параметров и устойчивость к внешним механическим воздействиям.
Поляризованные реле могут настраиваться в зависимости от положения неподвижных контактов и натяжения (сжатия) пружин, воздействующих на якорь (на рисунке 1.18 пружины не показаны), на двухпозиционную, двухпозиционную с преобладанием какого-либо состояния реле или трехпозиционную работу.
Пружины с двух сторон воздействуют на якорь, стремясь удерживать его в нейтральном (среднем) положении. Если натяжение пружин слабое и неподвижные контакты расположены симметрично относительно нейтрали, то при снятии напряжения с рабочей обмотки реле за счет потока Ф1
или Ф2
постоянного магнита 5 остается в том же положении, в котором он находился до снятия напряжения.
Рисунок 1.18 – Электромагнитные поляризованные реле
В этом случае механическое усилие пружин 4
, стремящиеся возвратить якорь в нейтральное положение, что меньше тягового усилия от потока постоянного магнита, стремящегося удержать якорь реле в притянутом положении. При подаче на рабочую обмотку реле напряжения противоположной полярности якорь реле сразу перебрасывается в противоположное крайнее положение, размыкая контакты 1 – 2 и замыкая контакты 2 – 3. при снятии напряжения контакты 2 – 3 останутся замкнутыми.
Рисунок 1.19 – Настройка работы поляризованного реле
Таким образом, якорь реле занимает только два устойчивых положения (позиции): крайнее левое (замкнуты контакты 1
– 2
) или крайнее правое (замкнуты контакты 2
– 3
).
Если неподвижный контакт, например 1
, установить с той же стороны относительно нейтрали, что и второй неподвижный контакт 3 (рисунок 1.19, б
), то тяговое усилие от потока Ф1
(потоки показы только на рисунке 1.
19, а
) постоянного магнита, стремящиеся удержать якорь реле в крайнем левом положении, будет намного меньше тягового усилия от потока Ф2
постоянного магнита, стремящегося удержать якорь в крайнем правом положении. В результате этого при соответствующем выборе жесткости пружины 4
при снятии напряжения с рабочей обмотки реле его якорь от воздействия тягового усилия от потока Ф2
всегда устанавливается и удерживается в крайнем положении.
Таким образом, при такой настройке поляризованного реле его якорь занимает два положения: крайнее левое положение (замкнуты контакты 1
– 2
) при подаче на рабочую обмотку реле напряжения соответствующей полярности или крайнее положение (замкнуты контакты 2
– 3
) при подаче на рабочую обмотку напряжения противоположной полярности, а также при снятии напряжения с рабочей обмотки (приоритет замыкания контактов 2
– 3
).
Если при симметричном положении контактов 1 и 3 относительно нейтрали выбрать пружину большей жесткости, обеспечивающей превышение механического усилия над тяговым усилием от потоков постоянного магнита в крайних положениях якоря, то при снятии напряжения с рабочей обмотки реле его якорь будет устанавливаться в нейтральное положение при разомкнутых контактах реле, рисунок 1.19, в
.
В этом случае поляризованное реле обеспечивает трехпозиционную работу6 1) замкнуты контакты 1
– 2
при подаче на рабочую обмотку постоянного напряжения соответствующей полярности; 2) замкнуты контакты 2
– 3
при подаче на рабочую обмотку постоянного напряжения противоположной полярности; 3) разомкнуты все контакты при снятии напряжения с рабочей обмотки.
Контакты поляризованных реле допускают коммутационные токи 0,2 – 1 А; время срабатывания 1 – 5 мс.
Рисунок 1.20 – Поляризованное реле типа РП-7
Отечественной промышленностью выпускаются поляризованные реле различных типов и с различной настройкой контактов. Например, реле типа РП-4 – двухпозиционное (с нейтральной настройкой); реле типа РП-5 – трехпозиционное; рели типа РП-7 – двухпозиционное с преобладанием.
На рисунке 1.20 показано поляризованное реле типа РП-7, состоящее из катушки 1
, полюсных наконечников 2
, якоря 3
, контактных пружин с подвижными контактами 4
, неподвижных контактов 5
, магнитопровода 6, керамической колодки 7
со штырьковыми выводами, что позволяет быстро включать реле в рабочую схему, вставляя его в соответствующую соединительную колодку.
При создании релейных схем автоматического управления различными технологическими процессами, а также машинами и агрегатами необходимо осуществлять замедление (задержку) срабатывания или отпускания после подачи на его вход командного сигнала.
Эту функцию выполняют релейные преобразовательные устройства, называемые реле времени. Реле времени, как правило, имеют элементы, посредством которых осуществляется регулируемая перенастройка выдержки времени в широких пределах. Все реле времени можно подразделить на – электромагнитные, моторные, электронные.
Электромагнитное реле времени с пневматической задержкой
представляет собой устройство, состоящее из приводного механизма электромагнитного типа и пристроенного пневматического механизма задержки. Пневматическое реле времени РВП-72 имеет выдержку времени 0,2 – 180 с и предназначены для использования в цепях переменного тока напряжением 127 и 220 В.
Выдержка времени получается за счет медленного натекания воздуха в камеру с регулируемым сечением отверстия. Эти реле имеют разные наборы контактов: замыкающие, размыкающие с выдержкой времени при замыкании или размыкании, а также наборы мгновенного срабатывающих контактов.
Пневматическое реле времени, рисунок 1.21 имеет электромагнит 1
и пневматическую приставку с микропереключателем 2
. Герметическая камера 3
пневматической приставки сообщается с атмосферой через узкое отверстие 4
.
При подаче управляющего сигнала якорь электромагнита 1
втягивается. Шток 6
, лишенный опоры, под действием пружины 11
медленно опускается вниз по мере заполнения полости приставки воздухом через отверстие 4
.
В конце хода штока рычаг 8
производит переключение контактов микропереключателя 2
. возврат реле в исходное положение происходит при снятии входного сигнала с электромагнита под действием пружины 9
. При этом воздух пневматической камеры мгновенно вытесняется через обратный клапан 7
. возврат контактов реле, следовательно, происходит без задержки времени. Для регулировки выдержки времени реле используют винт 10, изменяющий сечение дросселирующего отверстия 4
.
Моторное реле времени.
Для получения больших выдержек времени (десятки минут и часы) используют электродвигательные (моторные) реле времени. Моторные реле времени в своей основе имеет специальный низкоскоростной двигатель и редуктор с большим передаточным числом, на валу редуктора.
Механизм реле времени, рисунок 1.22 состоит из редуктора 1
, диска времени 2
, имеющего несколько зубцов, контактов 3
, включенных в цепь катушек электромагнитов или пускателей производственной машины, и катушки 4
паузного механизма 5
.
Диск времени, вращаясь с заданной скоростью, своими зубцами замыкает контактную группу 3 и включает электродвигатель производственного механизма или другие технологические установки. При помощи концевого выключателя размыкается цепь механизма 5
. механизм реле приводится в действие синхронным двигателем.
Рисунок 1.21 – Пневматическое реле времени с электромагнитом
По такому принципу работает реле времени РВТ-1200 с пределами регулирования 1 – 20 мин
, погрешностью выдержки времени ±0,5 сек
. Оно имеет пять независимых по времени цепей срабатывания. Подобные реле чаще всего применяют для задания программы автоматического управления каким-либо процессом, поэтому их часто называют также программными.
Рисунок 1.22 – Моторное реле времени
На рисунке 1.23 приведена схема моторного реле времени РВТ-1200. при замыкании ключа К
синхронный двигатель с редуктором начинает вращаться. Одновременно возбуждается электромагнит ЭМ
и сцепляет зубчатые колеса Z1
и Z2
.
На одной оси с колесом Z1
закреплены профильные шайбы (кулачки), одна из которых показана на рисунке. Двигатель начинает вращать профильные шайбы в направлении, указанном стрелкой, натягивая при этом пружину F2
.
Как только уступ выреза профильной шайбы S
подойдет к выступу рычага С
, рычаг под действием пружины F3
повернется, размыкая контакты 1
– 2
в цепи двигателя СД
и замыкая контакты 3
– 4
выходной цепи реле.
Рисунок 1.23 – Принципиальная схема моторного реле времени
При размыкании контактов 1
– 2
двигатель СД останавливается, а все профильные шайбы остаются в том положении, которого они достигли до тех пор, пока ключ SA
замкнут. При размыкании SA
сцепляющий электромагнит ЭМ
отпустит якорь, и пружина F1
расцепит колеса Z1
и Z2
.
Профильные шайбы под действием пружины F2
повернутся назад до упора А
. При этом контакты окажутся вновь в исходном положении, и реле времени готово к новому включению. Положение шайб на оси колеса Z1
определяет время замедления срабатывания данного контакта. Оно (установка времени) может быть установлено с помощью шкалы, градуированной в минутах и секундах.
Реле времени с электромагнитным приводом
типа ЭВ-100 на постоянном токе показано на рисунке 1.24. По имеющейся в реле шкале может задаваться выдержка времени замыкающих и проскальзывающих контактов. Реле этого типа могут создавать выдержки времени от 0,1 до 20 сек,
и имеют три разновидности исполнения контактов.
При подаче напряжения на обмотку 7 электромагнита цилиндрический плунжер 6 втягивается, сжимая возвратную пружину, при этом освобождается рычаг 5 сцепления с часовым механизмом. Часовой механизм 4 под действием встроенной в нем пружины 1 начинает вращаться, обеспечивая равномерное движение стрелки с подвижным контактом 3, который через заданный промежуток времени вызывает замыкание неподвижных контактов 2, закрепленных на контактной колодке. Выдержка времени задается поворотом контактной колодки 2 против соответствующей цифры на шкале.
Выпускают также аналогичные реле на переменном токе типа ЭВ-200.
Рисунок 1.24 – Реле времени ЭВ-100
Электронные (полупроводниковое) реле времени (ЭРВ)
, обычно в своих схемах используют различные полупроводниковые элементы (чаще всего транзисторные) и конденсаторы, время разряда или заряда которых и определяет выдержку времени, рисунок 1.25.
В исходном положении внешний управляющий контакт К
замкнут и на базу транзистора VT1
подан отрицательный потенциал источника питания GB
. Транзистор открыт, при этом потенциал базы транзистора VT2
будет положительным по отношению к его эмиттеру и будет закрыт.
Рисунок 1.25 – Схема устройства электронного реле времени
Команда на начало отсчета времени подается при размыкании внешнего управляющего контакта К
. после этого начинается разряд конденсатора С
через резистор R2
и переход эмиттер – база транзистора VT1
.
В конце разряда транзистор VT1
закроется, что приведет к появлению на базе транзистора VT2
отрицательного потенциала. Оно откроется, по обмотке реле KV
начнет протекать ток, оно сработает и переключит свои контакты. Отсчет времени закончится.
Выдержка времени такого реле определяется временем разряда конденсатора С
, которое зависит от величины его емкости и сопротивления резистора R2
. Регулируя эти величины, можно устанавливать требуемые выдержки времени реле. Выпускаемые электронные реле времени обеспечивают выдержку времени от 0,1 с до 10 мин.
Маятниковое механическое реле времени
рисунок 1.26 состоит из электромагнита с втяжным якорем 1
, который при подаче входного сигнала перемещает тягу 2
и, сжимая пружину 3
, стремится переместить рычаг с зубчатым сектором 4
справа налево.
Но спусковое зубчатое колесо 5
со скобой 6
может поворачиваться за каждое качение маятника 7
только на один зуб, благодаря чему скорость перемещения зубчатого сектора ограничивается. После этого как все зубцы сектора 4
выйдут из зацепления с храповым колесом 8
, сработает микропереключатель 9
.
При снятии выходного сигнала с электромагнита 1
сектор 4
быстро возвращается в исходное положение под действием веса якоря электромагнита 1
сектор 4
быстро возвращается в исходное положение под действием веса якоря электромагнита 1
и усилия пружины 3
.
Грубая настройка времени срабатывания регулируется винтом 10
, ограничивающим длину зацепления сектора 4
с храповым колесом 8. Точная настройка времени регулируется перемещением груза маятника 7
. Маятниковое реле обеспечивает выдержку времени до десятков секунд.
Рисунок 1.26 – Маятниковое реле времени с электромагнитом
Наряду с наиболее распространенными реле электромагнитного типа в системах автоматики находят применение и реле других типов, в которых тяговое усилие, необходимое для переключения контактов, создается не с помощью электромагнита. К такой группе реле относятся реле с магнитоуправляемыми контактами, магнитоэлектрические, электродинамические и индукционные реле.
Реле с магнитоуправляемыми контактами
, называемые герконами
(герметизированные контакты), рисунок 1.27 представляют собой стеклянную ампулу, заполненную инертным газом, а также азотом и водородом или из которой выкачан воздух (вакуумный геркон), в которую впаяны тонкие упругие ферромагнитные пластинки, выполняющие одновременно роль контактов, упругих элементов и части магнитопровода.
Управляются герконы внешним магнитным полем, которое создается катушкой обтекаемой током, или постоянным магнитом. Под действием магнитного поля концы пластин притягиваются, замыкая коммутируемую цепь. При исчезновении поля пластины вследствие силы упругости расходятся, рисунок 1.
27, а
. Для уменьшения переходного сопротивления контактов на концы пластин-контактов наносится слой серебра, золота, родия или других благородных металлов. Этот слой выполняет также роль немагнитной прокладки, не допускающей залипания контактов.
Рисунок 1.27 – Реле с магнитоуправляемыми контактами
Герконы обладают большим сроком службы с числом срабатываний, достигающим 106
– 109
. Благодаря малому расстоянию между контактами и малой инерционности пластинок-контактов реле с магнитоуправляемыми контактами – сравнительно быстродействующие элементы tср
= 0,5 ÷ 2.0 мс.
Промышленность выпускает разнообразные магнитоуправляемые контакты-герконы с замыкающими, размыкающими и переключающими контактами рисунок 1.27, а
– в
, а также реле с магнитоуправляемыми контактами, внутри катушки может находиться один или несколько герконов, рисунок 1.27, г
.
Реле на магнитоуправляемых контактах предназначены для использования в схемах автоматики в качестве промежуточных реле, реле защиты и запоминающих элементов. Реле промежуточные РПГ и РПГ-2 (миниатюрные) имеют большие функциональные возможности и повышенную надежность благодаря использованию контактов на герконах КЭМ-1. Реле с магнитной памятью РМГ применяют в схемах автоматики в качестве элементов памяти.
Магнитоэлектрические реле
. Принцип действия магнитоэлектрического реле основан на взаимодействии магнитного поля постоянного магнита с током, протекающим по обмотке, выполненной в виде поворотной рамки.
Магнитоэлектрическое реле, рисунок 1.28 состоит из постоянного магнита 1
, между полюсными наконечниками которого находится цилиндрический стальной сердечник 2
. В кольцевом зазоре между полюсными наконечниками и сердечником создается равномерное радиальное направленное магнитное поле.
В зазоре размещена легкая алюминиевая рамка 3
с обмоткой из тонкого провода, к которой подводится ток по спиральным пружинам из фосфористой или оловянно-цинковой бронзы. Эти пружины создают противодействующий момент, стремящийся установить рамку с обмоткой таким образом, чтобы ее плоскость была направлена по оси полюсов магнита 1.
При пропускании тока I
по обмотке реле на рамку с обмоткой действует вращающий момент, заставляющий ее поворачиваться вокруг оси в направлении, определяемом полярностью тока. Жестко закрепленный на рамке подвижный контакт 4
замыкается с одним из неподвижных контактов 5
или 6
.
Сила, действующая на проводник длиной l
, обтекаемой током I
и помещенный в магнитное поле с индукцией В
, определяется на основании закона Ампера:
F = BlI.
(16.1)
На рамку длиной l
, шириной а
, с числом витков ω действует вращающий момент
![]()
Рисунок 1.28 – Магнитоэлектрическое реле
Для конкретного реле Blaw = K =
const, следовательно,
Mир
= KI.
(16.3)
Из уравнения (16.3) видно, что при неизменных конструктивных параметрах реле и заданном токе I
в его обмотке вращающий момент имеет постоянное значение.
В то же время противодействующий момент, создаваемый закручивающимися токопроводящими пружинами, пропорционален углу закрутки, т.е. углу поворота рамки. Поскольку направление поворота рамки определяется направлением тока в обмотке, магнитоэлектрическое реле является поляризованным и может быть выполнено трехпозиционным.
По сравнению с другими электромеханическими реле магнитоэлектрическое реле является наиболее чувствительным, оно срабатывает при мощности управления в доли милливатта. Усилие на контактах магнитоэлектрического реле невелико (порядка 10-2
Н и менее), поэтому для повышения надежности контакты выполняются из платины и платинородиевого сплава.
Электродинамические реле
. Принцип действия электродинамического реле основан на взаимодействии двух катушек с током, одна из которых подвижна, а другая неподвижна. От магнитоэлектрического реле электродинамическое реле отличается тем, что индукция в рабочем зазоре создается не постоянным магнитом, а неподвижной катушкой на сердечнике, т.е. электромагнитным способом.
Устройство электродинамического реле показано на рисунке 1.29 на магнитопровод 3
надета неподвижная катушка 2
, обтекаемая током I2
. между полюсными наконечниками магнитопровода находится цилиндрический стальной сердечник 4
.
В кольцевом зазоре между полюсными наконечниками и сердечником создается равномерное радиальное направленное магнитное поле. В зазоре размещена легкая алюминиевая рамка 1
с обмоткой из тонкого провода, к которой подводится ток I1
по спиральным пружинам, создающим противодействующий момент, стремящийся установить плоскость рамки 1
вдоль оси полюсных наконечников.
При подаче управляющего тока I1
в обмотку рамки 1
она будет поворачиваться в зазоре между полюсными наконечниками и сердечником. Жестко закрепленный на рамке подвижный контакт 5
замыкается с одним из неподвижных контактов 6
и 7
.
Сила, действующая на проводники рамки электродинамического реле, определяется законом Ампера. Следовательно, будут справедливы уравнения (16.1) и (16.2) . однако входящая в эти уравнения индукция. В не постоянна, а определяется намагничивающей силой, создаваемой катушкой 2
с током I2
:
Рисунок 1.29 – Электродинамическое реле
В
= I2w2
/(Rмsδ
), (16.4)
где Rм
– магнитное сопротивление на пути магнитного потока возбуждения; sδ
–
площадь поперечного сечения рабочего воздушного зазора.
Подставляя (16.4) в (16.2) и выразив через постоянный коэффициент К
сочетание всех неизменных конструктивных и обмоточных данных реле, получим уравнение для вращающего момента электродинамического реле:
Mвр = K I1I2.
(16.5)
Из (16.5) видно, что направление поворота рамки зависит от направления токов в обеих обмотках реле, т.е. оно будет положительным при одинаковых направлениях токов и отрицательным при разных направлениях.
При работе реле на постоянном токе и питании его неизменным по значению и направлению током возбуждения I2
электродинамическое реле (как и магнитоэлектрическое) является поляризованным и трехпозиционным. В зависимости от направления управляющего тока I1
замыкается пара контактов 6
– 7
или 6
– 8
, а при отсутствии тока I1
контакт 6
находится в среднем, незамкнутом, положении.
Однако в отличии от магнитоэлектрического реле электродинамическое может работать при питании переменном током. В этом случае на рамку воздействует переменный магнитный поток, а направление поворота определяется средним за период значением вращающего момента
Mвр. ср. = K I1 I2 cosφ
, (16.6)
где I1
и I2
– действующие значения токов в обмотках; φ
– угол сдвига фаз между токами.
Из (16.6) следует, что электродинамическое реле реагирует на фазу входного сигнала, т.е. его можно использовать как реле сдвига фаз, срабатывающее при определенном значении φ
. Это же реле может реагировать и на мощность переменного или постоянного тока. В этом случае на одну из обмоток подается ток, а на другую – напряжение цепи.
При последовательном соединении обмоток I1
=I2
= I
вращающий момент
Mвр. = K I2
,(16.7)
Т.е. зависимость тягового усилия от тока будет аналогична электромагнитному нейтральному реле.
К недостаткам электродинамических реле следует отнести их большие габариты и вес.
Индукционные реле
. Принцип действия индукционных реле основан на взаимодействии переменных магнитных потоков с токами, индуцированными этими потоками.
Рисунок 1.30 – Индукционное реле скорости
Рассмотрим принцип действия индукционного реле скорости. Реле скорости (РКС
) механически соединяется с валом электродвигателя механизма скорость, которого требуется контролировать. РКС
работает аналогично асинхронному двигателю и устроено следующим образом.
Ротор реле, рисунок 1.30 представляет собой постоянный магнит 1
, соединенный с помощью валика с валом двигателя. Постоянный магнит помещен внутри алюминиевого цилиндра 2, имеющего обмотку в виде беличьей клетки. Цилиндр может поворачиваться вокруг оси валика 0 на небольшой угол, и переключать при этом с помощью упора 6 контакты 5 и 7.
При неподвижном двигателе упор занимает среднее положение, и контакты реле находятся в «нормальном» положении. При вращении двигателя и тем самым магнита 1
уже при небольших скоростях на цилиндр 2
начинает действовать вращающий момент, под действием, которого он поворачивается и обеспечивает с помощью упора 6
воздействует на контакты 5 или 7,
вызывая их замыкание с контактами 4
или 8
.
При скорости двигателя, близкой к нулю, цилиндр возвращается в среднее положение и контакты 5
или 7
переходят в свое «нормальное» состояние. Величина скорости, при которой переключаются контакты реле, определяется положением настроечных винтов 9, т.е. регулированием натяжения пружины.
Реле контроля скорости удобно использовать при автоматизации процесса торможения, когда требуется обеспечивать отключение двигателя от сети после снижения его скорости до нуля.
Реле счета импульсов
. Реле счета импульсов позволяет отсчитывать наперед заданное количество импульсов и передавать команду на исполнительные механизмы после отработки этих импульсов. С помощью этого реле осуществляется строгая цикличность в управляемом процессе.
Основным элементом реле счета импульсов является шаговый искатель (распределитель). Шаговый распределитель прямого хода, рисунок 1.31, а
, состоит из электромагнита 1
и якоря с храповым колесом 3
. При повороте якоря вокруг оси собачка 6 под действием пружины 7
зацепляется за зуб храпового колеса 3
и поворачивает его вал на одно деление зуба, перемещаясь до упора 5
. поворот вала вызывает перемещение контактных щеток 2
по контактным (ламельным) рядам.
По окончании действия импульса собачка 6
возвращается под действием пружины 8
в исходное положение. Собачка 4
препятствует обратному повороту храпового колеса. При подаче очередного импульса в электромагнит вал искателя прямого хода поворачивается на одно деление зуба, а щетки перемещаются на следующую ламель и т.д. Обычно в искателях бывает от трех до восьми ламельных рядов.
а – прямого хода; б – обратного хода
Рисунок 1.31 – Кинематическая схема шаговых распределителей
Распределитель обратного хода, рисунок 1.31, б
, отличается от первого лишь тем, что якорь снабжен движущейся пружиной 8
, обладающей достаточной упругостью для создания усилия, необходимого для перемещения щеток. При притяжении якоря собачка 6 скользит по зубьям храпового колеса 3
, не входя с ними в зацепление, и заводится пружиной 8
.
На рисунке 1.32 приведен общий вид шагового искателя.
1 – статор с ламелями; 2 – движущая собачка; 3 – скользящие контакты; 4 – ротор с храповым колесом; 5 – барабан; 6- обмотка электромагнита; 7 – контактная группа; 8 – якорь
Рисунок 1.32 – Шаговый искатель ШИ-17
Фотоэлектрические реле
состоят из фотоэлемента (воспринимающего элемента), усилителя и выходного электромеханического реле. Фотоэлемент преобразует падающий на него световой поток в изменении сопротивления или ЭДС.
Фотореле применяют в системах автоматического контроля и регулирования различных величин и параметров (температуры, уровня, размеров и т.д.), изменение которых приводит к изменению светового потока. На рисунке 1.33, а
приведена схема фотореле с фоторезистором BLR
и электромагнитным реле К1
и К2
, которая срабатывает при освещении BLR
.
В цепь фоторезистора включено слаботочное реле постоянного тока К1
выполняющее функции промежуточного усилителя и управляющее более мощным выходным реле К2
. При затемнении BLR
его сопротивление велико, поэтому ток в цепи катушки реле К1
имеет малую величину и реле К1
отключается, а следовательно и отключается выходное реле К2
.
Рисунок 1.33 – Схемы фотореле на фоторезисторе (а
) и фотодиоде (б
)
Фоторезисторы имеют малые габаритные размеры и массу, высокую чувствительность и надежность. Однако они более инерционны, чем другие фотоэлементы. При использовании в фотореле в качестве выходных элементов электромеханических реле, время срабатывания которых значительно, инерционность фоторезисторов не имеет существенного значения. В то же время фоторезисторы имеют большую мощность рассеяния, что позволяет получать простые и надежные схемы фотореле.
В схеме фотореле с фотодиодом, рисунок 1.33, б
в качестве промежуточного усилителя используют полупроводниковый усилитель на транзисторе VT
, в коллекторную цепь которого включена катушка выходного реле К
.
При затемнении фотодиода BLD
, включенного в цепь в непроводящем направлении, его сопротивление велико и, следовательно, транзистор VT
заперт. Выходное реле при этом обесточено и сигнал на выходе отсутствует. При освещении фотодиода его сопротивление в непроводящем направлении уменьшается во много раз, что обуславливает возникновение тока в цепи базы.
Транзистор отпирается, и возникающий ток в цепи коллектора обеспечивает срабатывание выходного реле и появление сигнала на выходе. Диод VD
защищает транзистор VT
от перенапряжений при его запирании. Фотодиоды, как и все полупроводниковые элементы, достаточно надежны, имеют малые размеры и большую чувствительность, чем фоторезисторы и другие фотоэлементы.
Контакторы
– это электромагнитные автоматические аппараты, предназначенные для автоматического и дистанционного управления электрическими цепями постоянного и переменного тока напряжением до 1000 В. Они широко применяются для частых включений и отключений электрических двигателей при дистанционном управлении.
Основные узлы любого электромагнитного контактора – электромагнитный механизм, главные контакты, дугогасительное устройство и блок-контакты.
Контакторы переменного тока промышленной частоты в большинстве своем имеют три замыкающих контакта (один контакт на фазу). Магнитопровод и якорь набираются из пластин электротехнической стали, изолированной одна от другой. На концах полюсов магнитопроводов размещены короткозамкнутые витки, каждый из которых охватывает часть своего полюса.
В контакторах переменного тока применяются мостиковые контакты с двумя разрывами на каждую фазу. Применение мостиковых контактов, как правило, исключает необходимость в специальных дугасительных камерах. Благодаря двум разрывам на фазу дуга будет гаснуть в закрытых камерах при первом же переходе тока через нуль.
Магнитная система выполняется с поступательным, рисунок 1.34 и поворотным, рисунок 1.36 движением якоря.
Рисунок 1.34 – Контактор с поступательным движением якоря
Контактор с поступательным движением якоря, рисунок 1.33 состоит из пластмассового корпуса, две половины которого соединены четырьмя винтами. Внутри корпуса размещена электромагнитная система, состоящая из неподвижной 7
и подвижной 5
части сердечника и обмотки 6
.
Подвижная часть сердечника шпонкой соединена с пластмассовой траверсой 4
, на которой смонтированы контактные мостики 2
с подвижными контактами. Плавность замыкания контактов и необходимое усилие обеспечивается пружинным амортизатором 1
.
При прохождении через обмотку заданного тока магнитное поле притягивает подвижную часть сердечника и связанную с ней траверсу с подвижными контактами и контакты переключаются. После отключения цепи в катушке подвижная часть сердечника возвращается в исходное состояние двумя спиральными пружинами.
Рисунок 1.35 – Торец сердечника контактора
Кроме главных контактов в контакторах на боковой поверхности смонтированы вспомогательные контакты на замыкание и размыкание. Главные контакты закрыты фасонной крышкой, защищающей их от загрязнения, случайных прикосновений и междуфазных замыканий.
Контактор с магнитной системой поворотного типа, рисунок 1.36 состоит из неподвижного сердечника 6
с обмоткой 5
, к которому на ярме прикреплен подвижный сердечник (якорь) 7
. при замыкании цепи управления по обмотке проходит ток, якорь притягивается к сердечнику.
Подвижные главные контакты 3
прижимаются к неподвижным 2
, тем самым замыкая силовую цепь 4
и обеспечивая прохождение тока по соответствующему приемнику электроэнергии. Главные контакты рассчитаны на большие токи и при их размыкании возникает электрическая дуга, разрушающая контактные поверхности.
Для быстрого гашения дуги установлены дугогасительные камеры 1 из дугостойкого изоляционного материала, в которых размещены специальные решетки из стальных обмедненных пластин. Электрическая связь подвижных контактов с их выводами на тыльной стороне основания контактора выполняется в виде гибких пакетов из медной фольги 8
. блокировочные контакты 9
находятся в левой части контактора.
Электрическая схема для одной фазы контактора приведена на рисунке 1.37 При нажатии на кнопку S1 на удерживающую катушку К1 подается линейное напряжение UАВ
и удерживающая катушка обтекается током. При этом проявляются магнитные свойства сердечника, на котором расположена катушка.
Якорь 7 притягивается к сердечнику, и рабочие контакты замыкаются. Одновременно замыкаются блок-контакты К1:4, шунтирующие кнопку S1 («Пуск»). Для отключения контактора достаточно нажать на кнопку S2 («Стоп»). При этом цепь удерживающей катушки прерывается и главные (рабочие) контакты размыкаются.
Дуга, возникающая между расходящимися рабочими контактам, под действием силы взаимодействия между электрической дугой и стальными пластинами вытягивается в решетку 6. При этом происходит ее деление на ряд коротких последовательных дуг. Дуга растягивается, охлаждается и гаснет. Продолжительность процесса включения контактора зависит от его типа и размеров, она составляет 0,08…0,1 с.
Рисунок 1.36 – Трехполюсной контактор с поворотным якорем
Рисунок 1.37 – Схема контактора
Структура условного обозначения
ХХХХХХХХ:
ХХ – вид контактора: КТ – контактор переменного тока с управлением переменным током; КТП – контактор переменного тока с управлением постоянного тока.
ХХ – номер серии: 60, 70.
Х – величина номинального ока: 1, 2, 3, 4, 5 (первая величина до 100 А, вторая величина – до 160 А, третья – 250 А, четвертая – до 400 А, пятая – до 630 А.
Х – число полюсов: 2, 3, 4, 5.
Х – специфические особенности серии: Б – модернизированные контакторы.
Х – материал главных контактов: буква в обозначении отсутствует – контакты медные; С – контакты с металлокерамическими накладками на основе серебра.
Например, КТП6054Б – контактор переменного тока с цепью управления, работающей на постоянном токе, модернизированный, серия 60, с номинальным током контактов до 630 А, контакты медные.
Механическая устойчивость изготовляемых в настоящее время контакторов достигает более 5 млн. включений и отключений.
Магнитный пускатель –
это комплексный коммутационный аппарат, предназначенный для пуска, отключения, реверса и защиты электродвигателей от перегрузки, исчезновения или значительного уменьшения питающего напряжения. Его единственное отличие от контактора – наличие устройства защиты (обычно теплового реле) от тепловых перегрузок.
Пускатель состоит их трехполюсного трехфазного контактора переменного тока, теплового реле и командоаппарата (кнопочный пост). Тепловое реле обеспечивает защиту электродвигателя от перегрева токами, превышающими номинальное значение и обрыва фаз из-за выхода контакта или сгорания предохранителя.
Нулевая защита – исключение повторного включения магнитного пускателя при появлении в сети ранее исчезнувшего напряжения – осуществляется замыкающим вспомогательным контактом магнитного пускателя (контакт шунтирующий кнопку «Пуск»).
Пускатели могут иметь исполнение: реверсивное, нереверсивное, с переключением обмоток двигателя «звезда-треугольник». Нереверсивный магнитный пускатель состоит из одного, а реверсивный – из двух контакторов и теплового реле, смонтированных на общем основании или в общей защитной оболочке.
Бесперебойная работа асинхронных двигателей в значительной степени зависит от надежности пускателей. Потому к ним предъявляются высокие требования в отношении износостойкости, коммутационной способности, четкости срабатывания, надежности защиты двигателя от перегрузок, минимального потребления мощности.
Пускатели выпускают на номинальные напряжения 127, 220, 380 и 500 В.
Контактор с нагретой до допустимого значения катушкой при подаче напряжения 0,85Uном
должен включаться без задержки подвижной системы в промежуточном положении, а при снижении напряжения до 0,7Uном
якорь должен удерживаться в притянутом положении, а при снятии напряжения должен четко отключаться.
При снижении напряжения меньше 0,7Uном
пускатель должен отключаться, осуществляя защиту двигателя от понижения напряжения в сети. В противном случае двигатель может остановиться, т.к. момент на валу пропорционален U2
, а это режим короткого замыкания.
Пускатели электромагнитные серии ПМЛ предназначены для дистанционного пуска непосредственным подключением к сети, для остановки и реверсирования трехфазных асинхронных двигателей с короткозамкнутым ротором, а в исполнении с трехполюсным тепловым реле серии РТЛ – для защиты управляемых электродвигателей от перегрузок недопустимой продолжительности и от токов, возникающих при обрыве одной из фаз.
Пускатели серии ПМЛ выпускаются на токи от 10 до 200 А, допустимая частота включений в час для пускателя 1 – 5 габаритов составляет 3600, а для 6 – 7 габаритов – 2400.
Буквенные обозначения пускателей серии ПМЛ указывают:
ПМЛ – ХХХХХХХ
ПМЛ – серия.
Х – величина пускателя по номинальному току (1 – 10А, 2 – 25А, 3 – 40А, 4 – 63А, 5 – 80А, 6 – 125А, 7 – 200А).
Х – исполнение пускателей по назначению и наличию теплового реле (1 – нереверсивный пускатель без теплового реле; 2 – нереверсивный пускатель с тепловым реле; 5 – реверсивный пускатель без теплового реле с электрической и механической блокировкой; 6 – реверсивный пускатель с тепловым реле с электрической и механической блокировкой; 7 – пускатель для схемы Y – Δ).
Х – исполнение пускателей по степени защиты и наличию кнопок (0 – 1Р00 без кнопок; 1 – 1Р54 без кнопок; 2 – 1Р54 с кнопками «Пуск» и «Стоп»; 3 – 1Р54 с кнопками «Пуск» и «Стоп», с сигнальной лампой.
Х – число контактов вспомогательной цепи: 0 – 1з (на 10…25 А) или 1з 1р (на 40…63 и 80…200А); 1 – 1р (на 10…25А) или 2з 2р (на 80…200А), 2 – 3з 3р (на 80…200А); 3 – 3з 1р (на 80…200А), 4 – 5з 1р (на 80…200А).
Х – сейсмостойкое исполнение пускателей;
ХХ – климатическое исполнение (О; ТВ) и категория размещения (2; 4) по ГОСТ 15150-69 и ГОСТ 15543-70.
Х – исполнение по износостойкости (А – более 400 циклов в сутки; Б – от 120-до 400; в – менее 120).
Исполнение пускателей по коммутационной износостойкости выбирается в зависимости от частоты срабатывания: при частоте срабатывания пускателя в категории применения АС-3 более 400 циклов в сутки – исполнение А, от 120 до 400 циклов в сутки – исполнение А, от 120 до 400 циклов в сутки исполнение Б, менее 120 циклов в сутки – исполнение В.
Пускатели электромагнитные серии ПМА предназначены для дистанционного пуска непосредственным подключением к сети, остановки и реверсирования трехфазных асинхронных двигателей с короткозамкнутым ротором мощностью до 75 кВт при напряжении до 380 и до 660 в переменного тока.
При наличии тепловых реле или аппаратов позисторной защиты пускатели защищают управляемые электродвигатели от перегрузок недопустимой продолжительности.
Структура условного обозначения
ПМА – ХХХХХХХ
ПМА – серия;
Х – величина пускателя в зависимости от номинального тока (3 – 40 А; 4 – 63 А; 5 – 100 А; 6 – 160 А);
Х – назначение и наличие теплового реле и аппарата позисторной защиты (1 – без реле, нереверсивные; 2 – с реле, нереверсивные; 3 – без реле, реверсивные с электрической блокировкой; 5 – без реле, реверсивные с электрической и механической блокировками;
6 – с реле, реверсивные с электрической и механической блокировками; 7 – с аппаратом позисторной защиты АЗП, нереверсивные; 8 – с АЗП, реверсивные с механической блокировкой; 9 – с аппаратом позисторной защиты УВТЗ – 1М, нереверсивные; 0 – с УВТЗ – 1М, реверсивные с механической и электрической блокировками);
Х – степепень защиты и наличие кнопок (0 – 1Р00; 1 – 1Р40 без кнопок; 2 – 1Р54 без кнопок; 3 – 1Р40 с кнопками «Пуск» и «Стоп»; 4 – 1Р54 с кнопками «Пуск» и «Стоп»; 5 – 1Р40 с кнопками «Пуск» и «Стоп» и сигнальной лампой; 6 – 1Р54 с кнопками «Пуск» и «Стоп» и сигнальной лампой);
Х – род тока цепи управления, напряжение главной цепи и число контактов вспомогательной цепи (0 – переменной, 380 В; 2 з. 2 р. для 3…6-й величин пускателей; 1 – постоянной, 380 В; 2 з. 2 р. для 5 и 6-й величин; 2 – переменный, 660 В; 2 з. 2 р. для 5 и 6-й величин;
3 – постоянной, 660 В; 2 з. 2 р. для 5 и 6-й величин; 4 – переменный, 380 В; 4 з. 2 р. для 4…6-й величин; 5 – постоянной, 380 В; 4 з. 2 р. для 5 и 6-й величин; 6 – переменный, 660 В; 4 з. 2 р. для 4…6-й величин; 7 – постоянной, 660 В; 4 з. 2 р. для 5 и 6-й величин; 8 – переменный, 380 В; 2 з. Для 3…6-й величин; 9 – переменный, 660 В, 2 з. Для 3…6-й величин);
ХХ – климатическое исполнение (У, Т, УХЛ, О) и категория размещения (2, 3, 4) по ГОСТ 15150 – 69 и ГОСТ 15543 – 70;
Х – износостойкость (А, Б, В).
Контрольные вопросы
1. Что такое реле?
2. Как работает электромагнитное реле?
3. Перечислите основные параметры электромагнитного реле.
4. Поясните график изменения тока в обмотке реле при его срабатывании и отключении.
5. Что такое тяговая и механическая характеристики реле?
6. Чем отличаются реле переменного тока от реле постоянного тока?
7. Какие способы позволяют повысить быстродействие реле?
8. Назовите область применения электромагнитных реле?
9. Что такое поляризованное реле?
10. В чем разница между поляризованным и нейтральным реле?
11. Как выполняется настройка контактов поляризованного реле?
12. Какие виды контактов применяются в реле?
13. Какие требования предъявляются к рабочим контак там и почему?
14. Поясните принцип действия магнитоэлектрического реле.
15. Поясните принцип действия электродинамического реле.
16. Поясните принцип действия индукционного реле.
17. Поясните принцип действия реле времени?
18. Что такое геркон и как он устроен?
19. В чем преимущество герконов?
20. Чем отличается контактор от обычного реле?
21. Где используются контакторы и магнитные пускатели?
22. Чем магнитный пускатель отличается от контактора?
23. Какие способы гашения электрической дуги вам известны? В чем их достоинства и недостатки?
Под коммутацией обычно понимают выполнение операций включения, отключения и переключения электрических цепей. Коммутационные элементы предназначены для выполнения этих операций. Различают коммутационные элементы ручного и автоматического управления. Коммутационные элементы ручного управления срабатывают при непосредственном механическом воздействии на их органы управления.
Коммутационные элементы различают по числу коммутируемых цепей (одноцепные и многоцепные) и по числу фиксированных положений, причем имеются коммутационные элементы с самовозвратом в исходное положение, т.е. без фиксации переключенного положения, что может быть необходимо для ряда схем управления.
К коммутационным элементам с механическим приводом относятся рубильники, кнопки (кнопочные посты) управления, микропереключатели, тумблеры, пакетные и универсальные переключатели, а также концевые и путевые переключатели.
Кнопки управления
. Кнопки управления представляют собой электрические аппараты с ручным приводом и предназначены для подачи оператором управляющего воздействия в систему автоматизации. Они различаются по величине – нормальные и малогабаритные, по числу замыкающих и размыкающих контактов, по форме толкателя.
Одноцепные кнопки управления выпускают с замыкающим и размыкающим контактами. Двухцепные кнопки имеют обе пары контактов с единым приводом. Особенностью кнопок управления является их способность возвращаться в исходное (нормальное) состояние (самовозврат) после снятия воздействия.
Кнопки различаются по виду управляющего элемента (толкателя): КЕ-011 – толкатель цилиндрический; КЕ-021 – толкатель грибовидный. Цвет толкателя может быть красный, черный, желтый, зеленый, белый (кнопка «Стоп» – как правило, в красный цвет).
Независимо от конструкции и габаритных размеров кнопок, рисунок 2.1 все они имеют неподвижные контакты 1
и подвижные 6
перемещаемые с помощью толкателя 3
. внешняя цепь подсоединяется к кнопке с помощью винтовых зажимов 7
.
К каждому зажиму контактного элемента можно присоединить два медных провода сечением до 1,5 мм2
. Ввод проводов в посты производится через отверстие в кожухе с резьбой ½”
или 3
/4″
. Корпус 2
фиксируется на панели управления гайками 4
и 5
.
Рисунок 2.1 – Конструкция кнопки управления
Электрические параметры наиболее распространенных кнопок приведены в таблице 2.1
Таблица 2.1 – Электрические параметры кнопок управления различных типов
Наименование параметров | Типы кнопок | ||||
КУ0 | КУ1, КУ2 | КЕ | ВК14-21 | К20. К03 | |
Номинальное напряжение, В: переменного тока постоянного тока | 380 220 | 500 440 | 500 220 | 660 440 | 380 220 |
Минимальное напряжение, В | 24 | 24 | 24 | 12 | – |
Номинальный ток, А | 2,5 | 5 | 6 | 10 | 5 |
Разрываемый переменный ток, А | 2.5 | 12 | 9,6 | 16 | 6 |
Долговечность и надежность кнопок управления оценивают коммутационной износостойкостью, которую выражают в гарантированном числе циклов включений-отключений под нагрузкой. Этот параметр различен для различных кнопок и условий эксплуатации. Например, для кнопок типа ВК 14-21 с медными контактами он составляет 0,25·106
циклов, с биметаллическими контактами – 2,5·106
, с серебряными контактами – 4·106
.
На основе кнопок управления изготовляют кнопочные станции, содержащие до 12 кнопок различного исполнения, собранных на общей панели или в одном корпусе. Кнопочные посты управления, рисунок 2.2 предназначены для коммутации электрических цепей управления и имеют такие же параметры, как и кнопки серии КЕ.
Для удобства обслуживания головки штифтов (кнопок) могут снабжаться надписями «Пуск», «Стоп», «Вперед» и т.д.
1 –неподвижные контакты; 2 – подвижные контакты; 3 – возвратная пружина
а
– двухкнопочный;
1 – размыкающие контакты; 2 – возвратная пружина; 3 – замыкающие контакты; 4 – контактный мостик
б
– трехкнопочный
Рисунок 2.2 – Кнопочные посты
Условное обозначение постов формируется из названия серии (ПКЕ); обозначение способов крепления (1 – для встройки в нишу; 2 – для крепления к ровной поверхности; 3 – подвесные; 5 – подвесные с аварийным стопом; 6 – «пуск-стоп» для встройки в нишу; 7 – «пуск-стоп» для крепления к ровной поверхности);
обозначение степени защищенности от воздействия окружающей среды (1 – 1Р40, 2 – 1Р54);
обозначение материала корпуса (1 – металл, 2- пластмасс);
число толкателей;
обозначение климатического исполнения и категории размещения по ГОСТ 15150-69.
Посты всех типов, кроме «пуск-стоп», выпускают с любой комбинацией замыкающих и размыкающих контактов, с толкателем цилиндрической формы любых цветов. Посты «пуск-стоп» изготавливают с контактным элементом, имеющим 1з и 1р контакты, и цилиндрическими толкателями: черного цвета – для замыкающего контакта, красного – для размыкающего.
В последнее время все большее распространение получили кнопки управления с прямоугольной формой толкателя – их называют клавишами.
Для коммутации нескольких цепей при нескольких фиксированных положениях для выбора различных режимов работы используются универсальные и пакетные выключатели и переключатели.
Универсальные переключатели
предназначены для ручного переключения цепей управления напряжением до 440 В постоянного тока и до 550 В переменного тока с частотой 50 Гц. Они применяются в качестве коммутаторов для управления различными электроустановками с неавтоматическим (ручным) замыканием, размыканием и переключением вспомогательных электрических цепей постоянного и переменного тока.
Контактная система универсального переключателя представлена на рисунке 2.3 На валике 1
установлены кулачковые шайбы 3
, 4
, 9
(правая 4
и левая 9
– включающие, средняя 3
– отключающая).
К контактной скобе 6
приварены неподвижные контакты 5
.Элементы контактной секции укреплены на изоляционной перегородке 2
, а неподвижные контакты 5
– на изоляционной рейке 7
. При повороте валика 1
поворачиваются кулачковые шайбы.
Одна из шайб поворачиваются кулачковые шайбы. Одна из шайб (4
или 9
) выступом нажимает на хвостовик скобы включения правой (или левой) контактной системы. Отключение ее произойдет при нажатии выступа рабочей поверхности средней шайбы 3
на шип 10
пальца 11
(к ним приварены серебряные контакты 8); хвостовик скобы 12 при этом перейдет во впадину шайб 4
или 9
.
Рисунок 2.3 – Контактная секция универсального переключателя
Универсальные переключатели серии УП5300 могут коммутировать до 32 цепей и иметь до 8 положений (позиций) рукоятки управления.
Переключатели выполняются либо с фиксацией рукоятки в определенных положениях, либо самовозвратом рукоятки в нулевое положение. Рукоятка может иметь овальную или револьверную форму.
Механическая износоустойчивость аппаратов составляет 1 млн. переключений. За одно переключение принимается поворот рукоятки на одно коммутационное положение.
Пакетные выключатели и переключатели
применяют в качестве вводных выключателей и переключателей цепей управления электроустановок переменного тока напряжением 380 В частотой 50 Гц, и постоянного тока напряжением 220 В. Для пакетных выключателей и переключателей обычно указывают два значения номинальной силы тока – сила тока выключения при напряжении 220 В и сила тока выключения при напряжении 380 В.
Рисунок 2.4 – Пакетный выключатель
Пакетный выключатель, рисунок 2.4, состоит из пакетов изоляционных дисков 6, (диафильм), смонтированных на изолированном от токоведущих частей валу 3. На дисках укреплены подвижные упругие контакты 4 из гартованной латуни, которые обжимают неподвижные контакты 5, установленные в корпусе пакетного выключателя.
Выключатель включается и отключается при повороте его вала 1 от руки рукояткой. При этом вместе с валом поворачиваются подвижные контакты, электрически соединяющие (обжимающие) неподвижные контакты или разобщающиеся с ними. Достаточно высокая скорость перемещения подвижных контактов обеспечивается пружинами 2.
Таблица 2.2 – Характеристики пакетных выключателей
Тип выключателя | ||
ПВ-10 (I)* | ||
ПВ3-25М(III) | ||
ПВ3-60М (V) | ||
* в скобках указана величина выключателя.
Пакетные выключатели и переключатели выдерживают 200000 включений при частоте не более 5 переключений в минуту. Условное обозначение этих аппаратов включает следующие буквы и цифры: П – пакетный; В или П – соответственно выключатель или переключатель, первая цифра после букв – количество коммутируемых цепей (2, 3, 4), цифра после тире – номинальная сила тока выключения при Uн
= 220 В.
Тумблеры
используют в качестве выключателей, а также двух- и трехпозиционных переключателей. На рисунке 2.5 показано устройство двухпозиционного тумблера. Мостиковый контакт, выполненный в виде токопроводящего ролика 1, замыкает одну из двух пар неподвижных контактов 2.
Рисунок 2.5 – Двухпозиционный тумблер
Путевые и конечные выключатели.
Путевые и конечные выключатели представляют собой коммутационные элементы, кинематические связанные с рабочей машиной и срабатывающие в зависимости от перемещения подвижной части рабочей машины. Выключатель, ограничивающий ход рабочего механизма, называют конечным
выключателем.
По характеру перемещения подвижного штока выключатели подразделяются на нажимные, шток совершает прямолинейное движение и рычажные, (движение передается через устройство в виде рычага, поворачивающийся на некоторый угол.). Выключатели, у которых срабатывание контактов зависит от скорости движения упора, называют выключателями простого
действия.
Выключатели, у которых переключение контактов не зависит от скорости движения упора называют моментными
. Здесь контакты связаны с подвижным (измерительным) устройством через систему с двумя фиксированными при помощи пружин положениями.
Нажимные выключатели выпускают в основном простого действия, рисунок 2.6, а
. Выключатель состоит из основания 1
, неподвижных контактов 6
, штока 4
, опирающегося на сферическую поверхность втулки 7
, несущей мостики подвижных контактов 5
.
Для более надежного включения подвижные контакты 5
и неподвижные 6
поджимаются пружиной 2
. При воздействии усилия шток 4
перемещается, и контактные мостики отключают размыкающие и включают замыкающие контакты.
Надежное включение контактов обеспечивает пружина 3
. Когда габариты выключателей не позволяют установить их из-за недостатка места, применяют микропереключатели
. Они обеспечивают быстрое переключение контактов при незначительном перемещении штока, что достигается применением специальной контактной пружины.
У выключателей моментного действия, рисунок 2.6, б
и в
, на клеммных колодках 1
укреплены неподвижные контакты 2
. Мостик подвижных контактов 6
смонтирован на рычаге 3
.
Подвижный (измерительный) рычаг 5
связан с поводком 10
не жестко, а через набор ленточных пружин 11
(во избежание поломок выключателя). Планка 7
связана с рычагом 3
, при его повороте шарик 8
под действием пружины 9
заставляет планку 7
мгновенно переключать контакты в момент освобождения ее собачкой 13
.
В промышленности находят широкое применение выключатели ВК-200, ВК-300, ВПК-1000, взрывозащищенные ВКМ-ВЗГ.
Рассмотренные путевые и конечные выключатели имеют сравнительно низкую надежность, связанную с повышенным износом контактной пары. Более высокая надежность обеспечивается при использовании бесконтактных датчиков (например, индуктивного или фотоэлектрического типов), мгновенность срабатывания которых обеспечивается с помощью электронных схем.
Бесконтактные переключающие устройства.
Эти устройства надежнее контактных,
особенно при большой частоте переключений. В качестве бесконтактных переключающих устройств индуктивного типа широко распространены параметрические и генераторные датчики положения.
Принципиальная схема бесконтактного переключающего устройства на основе индуктивного генераторного датчика положения приведена на рисунке 2.7. Это транзисторный генератор колебаний, амплитуда колебаний которого управляется с помощью металлической заслонки 2
между катушкой колебательного контура 1
и катушкой обратной связи 3
.
При отсутствии заслонки в зазоре между катушками схема генерирует колебания, увеличивающие среднее значение тока через транзистор-генератор VT1
. Этот ток усиливается выходным транзистором. Когда заслонка проходит между катушками, коэффициент обратной связи уменьшается, амплитуда колебаний падает и колебания прекращаются, что в свою очередь, вызывает закрытие выходного транзистора VT2
. На таком принципе построены бесконтактные выключающие устройства типа КВД, БК.
а
– простого действия; б
– моментного действия; в
– кинематическая схема
Рисунок 2.6 – Конечные выключатели
Рисунок 2.7 – Схема бесконтактного переключающего устройства на
основе индуктивного датчика
Технические данные выключателей типа КВД в зависимости от ширины щели в корпусе для прохода металлической пластинки и напряжения питания приведены в таблице 2.2
Таблица 2.2 – Технические данные выключателей типа КВД
Типы выключателей | Ширина щели в корпусе, мм | Напряжение питания постоянного тока | |
В | % | ||
КВД-3-12 | 3 | 12 | 10 |
КВД-3-24 | 24 | -15 | |
10 | |||
-15 | |||
КВД-6-12 | 6 | 12 | 10 |
-15 | |||
КВД-6-24 | 12 | 10 | |
-15 | |||
Микропереключатель представляет собой коммутационное устройство с механическим приводом. Он используется в качестве исполнительных устройств дистанционного управления, а также в качестве базового элемента для ряда коммутирующих изделий: кнопок, кнопочных, клавишных и других переключателей.
а
– контакты 3
и 4
замкнуты; б
– контакты 3
и 4
разомкнуты
Рисунок 2.8 – Контактная группа микропереключателя
Отличительная особенность микропереключателей заключается в конструкции механизма, обеспечивающего быстрое переключение контактов независимо от скорости перемещения приводного механизма. На рисунке 2.8 показана контактная группа микропереключателя с приводным элементом в двух состояниях.
В исходном состоянии контакты 3
и 4
замкнуты под действием результирующей силы пружин. При действии на пружину внешней силы с помощью приводного элемента пружина начинает изгибаться. Одновременно изгибается жестко связанная с ней на одном конце вторая пружина.
Внешние соединения микропереключателя выполняются с помощью пайки к выводам. Переключатель способен работать в цепях с напряжением до 380 В при токе до 3 А. перемещение штока составляет 0,5 – 0,7 мм, необходимое усилие для срабатывания не более 5 – 7 Н. время срабатывания 0,01 – 0,02 с при частоте включений до двух раз в минуту.
Рубильники –
это простейшие коммутационные аппараты, которые в основном предназначаются для неавтоматического нечастого замыкания и размыкания силовых электрических цепей постоянного и переменного тока напряжением до 500 В и тока до 5000 А, и имеет 1 – 3 полюса.
Рубильники состоят из подвижных ножей и неподвижных контактов. Подвижные контактные ножи в нижней своей части прикреплены шарнирно к контактным стойкам, а в средней – связаны общей траверсой из изолирующего материала. Верхние концы контактных ножей входят в неподвижные контакты, выполненные в виде двух пружинящих губок.
При размыкании контактов возникает электрическая дуга. Для ее быстрого гашения аппараты снабжают дугогасительными контактами
и дугасительными камерами
.
Дугогасительные контакты, включаясь последними, предохраняют главные ножи от обгорания. В рубильниках с дугогасительной камерой дуга разделяется на несколько частей, охлаждается и гаснет.
По роду привода рубильники бывают: с центральной или боковой рукояткой, с боковым или центральным рычажным приводом. По защищенности: открытые – компоновки распределительных устройств станций и подстанций (для помещений не пригодны); защищенные (с защитными кожухами) – для отдельных электрических установок.
По способу подключения проводов рубильники могут быть с передним или задним присоединением.
Рубильники, как указывалось выше, могут иметь дугогасительные камеры. Предельный ток, который можно отключить рубильником (Iпо
) без дугогасительных камер Iпо![]()
0,3 Iном. руб.
(при U = 380 В). При U > 380 В отключать цепь под током рубильником без дугогасительных камер вообще не разрешается. При наличии дугогасительных камер Iпо![]()
Iном. руб.
(при U = 380 В) и Iпо![]()
0,5 Iном. руб.
(при U = 500 В).
Рубильники имеют следующую маркировку: Р, РБ, РПБ, РПУ. Первая буква в маркировке типа означает: Р – рубильник, П – переключатель; вторая: Б – боковая рукоятка, П – наличие привода; третья Б – боковой привод, Ц – центральный привод; первая после буквенного обозначения цифра определяет число полюсов, вторая – условное значение номинального тока (1 – 100 А, 2 – 200 А, 4 – 400 А).
Рубильники для электроустановок выбирают по номинальному напряжению
Uном. руб.![]() ном. с.; максимальной силе тока выключения
ном. с.; максимальной силе тока выключения
Iном.![]() длит.и по степени защиты от влияния внешней среды
длит.и по степени защиты от влияния внешней среды
. В сухих помещениях рубильники устанавливают в шкафах и ящиках защищенного исполнения. На рисунке 2.9 показан трехполюсной рубильник с боковой рукояткой (защитный кожух снят), а на рисунке 2.10 – с рычажным центральным приводом, в этом случае рубильник устанавливается позади панели распределительного щита, что делает управление им удобнее и безопаснее.
Выпускают также аппараты, предназначенные для выполнения функций, как рубильника, так и предохранителя. Применяют их для ручного включения и отключения цепей под нагрузкой, а также для защиты цепей при перегрузках и ко-
ротких замыканиях. Блок предохранитель-выключатель представляет собой выключатель (рубильник), вместо ножей которого встроены предохранители. Предохранитель-выключатель позволяет значительно уменьшить размеры распределительных щитов. В этих аппаратах применяют, как правило, предохранители ПН-2. Наиболее часто используют предохранители-выключатели типа ППВ и блоки предохранителей-выключателей БПВ.
1 – изоляционное основание; 2 – неподвижный контакт; 3 – рукоятка; 4 – неподвижный контакт; 5 – вывод.
Рисунок 2.9 – Рубильник с боковой рукояткой типа РБ
1 – панель щита; 2 – панель рубильника; 3 – тяга.
Рисунок 2.10 – Рубильник с рычажным приводом
Контроллеры – это многоконтактные коммутирующие устройства ручного управления, предназначенные для пуска, реверса, торможения и регулирования частоты вращения двигателей постоянного и переменного тока путем переключения их обмоток или включением в цепи этих обмоток резисторов.
Рассмотрим принцип работы на примере барабанного контроллера, рисунок 2.11, а
. На валу 3
, изготовленного из изоляционного материала, закреплены медные сегменты 4
различной длины, смещенные относительно друг друга под различными углами.
Эти сегменты, выполняющие роль подвижных контактов, определенным образом соединены между собой. Подвижная часть контроллера называется барабаном. Напротив каждого сегмента расположены неподвижные контакты в виде плоских металлических пластин 2
, укрепленных на изоляционном основании 1
.
а
– устройство; б
– схема включения
Рисунок 2.11 – Контроллер барабанного типа
Посредством рукоятки вал 3
можно поворачивать, при этом сегменты 4
в определенной последовательности приобретают контакт с пластинами 2
либо утрачивают его, в зависимости от взаимного углового смещения сегментов относительно друг друга.
На рисунке 2.11, б
представлена развернутая в плоскости схема контроллера (обведенная штриховой линией) для управления двигателем постоянного тока последовательного возбуждения. Сегменты изображены отрезками толстых линий, соединенных между собой определенным образом.
Барабан контроллера имеет семь положений: одно нейтральное 0, положение I, II и III при повороте барабана по часовой стрелке (относительно нейтрального положения) и положения I’
, II’ и III’
при повороте барабана против часовой стрелки.
При нейтральном положении барабана двигатель выключен. При положении барабана I происходит соединение неподвижных контактов 9 – 8 – 7 – 6 – 5, а также 4 – 3. Электрический ток проходит от клеммы «плюс» через обмотку возбуждения ОВ, через катушку дугогашения S на контакт 1, через резисторы пускового реостата Rпр
, через контакты 3 – 4, по обмотке якоря и через замкнутые клеммы 7 – 6 – 5 на клемму «мину».
При этом начинается пуск двигателя. При повороте барабана в положения II его сегменты замыкают клеммы 2 – 3 и шунтируют первую ступень пускового реостата. Пуск двигателя продолжается при уменьшенном сопротивлении пускового реостата. При повороте барабана в положение III замыкаются контакты 1 – 2, шунтируется вторая ступень пускового реостата, процесс пуска заканчивается и двигатель переходит в рабочий режим.
Если барабан повернуть в положение I’
, то направление тока в якоре изменится и начнется пуск двигателя в противоположном направлении. В положении II’ пуск продолжится, в положении барабана III’
двигатель выйдет на рабочий режим.
Недостаток контроллера барабанного типа – ненадежность контактных соединений. Поэтому практически применение получили командоконтроллеры кулачкового типа, в которых вместо скользящих контактов применен набор кулачковых элементов. На рисунке 2.12 два кулачковых элемента, каждый из которых коммутирует свою электрическую цепь.
1
– вал; 2
– кулачковый диск; 3
– подвижный контакт; 4
– неподвижный контакт; 5
– изоляционная пластина неподвижных контактов; 6
– пружина; 7
– ролик; 8
– пружина для прижатия ролика к кулачковому диску
Рисунок 2.12 – Кулачковые элементы командоконтроллера
При определенном положении кулачковых дисков эти контакты замыкаются на неподвижные контакты 4
, расположенные на изоляционном основании 5
. посредством пружины 6
обеспечивается необходимое усилие сжатия контактов.
Пружина 8
прижимает рычаг с роликом 7
к кулачкам, обеспечивая замыкание или размыкание контактов в строгом соответствии с формой и положением кулачковых дисков 2
. Кулачковые диски командоконтроллеров можно настроить на требуемую последовательность команд и таким образом задать необходимую программу работы управления механизмом. Число коммутируемых цепей в командоконтроллере может достигать 12
.
Контрольные вопросы:
1. Назначение кнопок управления и кнопочных постов?
2. Поясните устройство кнопок управления и кнопочных постов.
3. Основное назначение путевых и коечных выключателей.
4. Поясните устройство и принцип действия нажимных и рычажных конечных выключателей.
5. Особенности использования микропереключателей в системах автоматического управления.
6. Поясните устройство и принцип действия пакетного выключателя.
7. Поясните назначение рубильников и область их применения.
8. Какой рубильник наиболее безопасен в обслуживании?
9. Каково назначение и устройство контроллера?
Для защиты электродвигателей от длительной перегрузки и связанного с этим недопустимого перегрева служат тепловые реле. Их основным элементом является биметаллическая пластинка из металлов с различными коэффициентами теплового расширения. При нагревании проходящим током такая пластинка деформируется в сторону металла с большим коэффициентом линейного расширения, вызывая срабатывание реле.
На рисунке 3.1 приведена кинематическая схема теплового реле РТЛ. Ток протекает по нагревательному элементу 1
. Биметаллическая пластинка 2
отгибается и поворачивает держатель 3
, который выводит защелку 5
из зацепления с эксцентриком 4
.
При снятии защелки траверса 6
под действием пружины 7
поднимается вверх и размыкает блок-контакты 8
. Поворачивая эксцентрик, изменяют расстояние а
. Чем больше это расстояние, тем на больший угол отгибается биметаллическая пластина, размыкая блок-контакты реле. Следовательно, реле будет срабатывать (через 20…30 мин) при большем токе, протекающем через нагреватель.
Рисунок 3.1 – Схема теплового реле
Тепловое реле имеют регулировку тока уставки в пределах ± 25%. регулировку теплового реле производят: если нагреватель рассчитан на ток, не равный номинальному току нагрузки; если температура окружающей среды отличается от нормальной на ±10 о
С.
Механизм изменения уставки имеет шкалу с делениями, нанесенными по обе стороны от нулевой отметки. Цена деления – 5% уставки.
Тепловые реле включаются в две фазы трехфазных двигателей непосредственно или через трансформатор тока ТА
, если ток двигателя превышает номинальный ток реле рисунок 3.2. В реле новых конструкциях тепловых реле РТЛ биметаллические пластинки устанавливают во всех фазах.
Рисунок 3.2 – Схема включения теплового реле
Допустимость выбора номинальных токов нагревательных элементов, несколько отличающихся от номинальных токов двигателей, объясняется тем, что тепловые реле имеют устройство для регулирования тока установки (Iуст
).
Под последним имеется в виду тот ток, значение которого устанавливается оператором с помощью регулятора тока уставок реле. При превышении этого тока – при перегрузке реле должно сработать с заданным временем, зависящим от степени перегрузки, определяемой характеристикой реле – tреле=ƒ(Iреле)
.
Например, у реле ТРН головку регулятора тока уставки, снабженную контрольной риской, можно поворачивать вправо на пять делений шкалы уставок или влево на пять делений от средней – нулевой риски, соответствующей току уставки Iуст 0
Ток уставки Iуст 0
равен номинальному току установленного в реле нагревательного элемента Iном. нагр. элем. (Iуст 0
= Iном. нагр. элем.)
при условии равенства температур окружающего реле воздуха и температуры, при которой производилась калибровка нагревательного элемента на заводе (Θзав
=20 0
С).
Каждое деление шкалы уставок этого реле соответствует примерно 5% от Iуст.0
. При повороте головки регулятора по часовой стрелке происходит соответствующее увеличение тока уставки (плюс), а при повороте против часовой стрелке – уменьшение (минус).
Таким образом, регулирование тока уставки реле ТРН возможно в пределах (0,75…1,25) Iуст.0
. Например, если номинальный ток нагревательного элемента, установленного в реле, Iном. нагр. элем=20А
, то при температуре воздуха, окружающего реле, равной заводской – Θзав
=20 0
С, Iуст.
Деление шкалы уставок для тепловых реле типа ТРН выбирается в соответствии с выражением
![]() = (Iном – I0)/(cI0),
= (Iном – I0)/(cI0),
где Iном
– номинальный ток электродвигателя;
I0
– ток нулевой уставки реле;
с
– цена деления, равная 0,05 для открытых пускателей и 0,055 для защищенных.
Для токовых реле типа ТРН при температуре окружающей среды ниже 40 0
С вводится поправка на окружающую температуру
N2 = (tокр – 30)/10
При окружающей температуре выше 40 0
С поправка не вводится. С учетом поправки на температуру окружающей среды результирующее деление шкалы
N = N1 N2.
Полученные дробные расчетные значения делений шкалы уставок округляют до ближайшего целого значения.
Пример
. Пускатель серии ПМЕ с тепловыми реле типа ТРН включает электродвигатель с номинальным током Iном
= 5 А. Ток нулевой уставки теплового реле I0
= 6 А. Пускатель имеет открытое исполнение.
Находим
N1
= (5 – 6)/(0,05·6) = -3,3.
Так как реле типа ТРН имеет температурную компенсацию, то поправка на температуру окружающей среды не требуется. Механизм регулировки следует установить на отметку N
= – 3 (третье деление влево от нулевой отметки).
Условное обозначение теплового реле РТТ имеет следующую структуру:
РТТ-Х1
Х2
Х3
Х4
Х5
,
где Х1
– номинальный ток реле [1 – исполнение на 40 А (РТТ-1); 2 – исполнение на 63 А (РТТ-2)]; Х2
– цифры, обозначающие способ установки реле (1 – исполнение на все токи для индивидуальной установки; 2 – исполнение на 40 а (РТТ-1) для присоединения к пускателю ПМ12-040;
3 – исполнение на 40 А (РТТ-1) для присоединения к пускателю ПМ12-025; Х3
– вид контактов вспомогательной цепи реле (1 – с размыкающим контактом; отсутствие цифры означает переключающий контакт); Х4
– исполнение реле по инерционности (П – пониженная инерционность, только для РТТ-2; Х5
– климатическое исполнение УХЛ или 0.
Плавкие предохранители – наиболее простые аппараты, предохраняющие электроприемники от перегрузок и токов короткого замыкания. Основные элементы предохранителя: патрон или корпус, плавкая вставка, закрепленная в патроне, контактное устройство. Включенный в защищаемую цепь предохранитель должен при нормальном режиме работать неограниченно долго.
Если же в цепи возникнет перегрузка или короткое замыкание, то при увеличении тока плавкой вставки расплавляется, в результате происходит отключение защищаемой цепи. продолжительность плавления вставки зависит от плавящего тока и с увеличением его уменьшается.
По конструкции предохранители бывают: пробочные (резьбовые) и трубчатые.
Пробочные (резьбовые)
предохранители широко применяют для защиты осветительных установок и электродвигателей малой мощности при напряжении до 380 В. предохранитель однополюсной резьбовой переднего присоединения, рисунок 3.3, а
состоит из фарфорового основания 8
, к которому подсоединена пластина 7
с контактным винтом 9
и пластина 10
с резьбовой гильзой 6
.
Пластмассовый чехол 5
укрепляется на предохранителе при ввинчивании кольца 4
. Фарфоровая пробка имеет резьбу 1
и контакт 3
, соединенный калиброванной плавкой вставкой 2
. Собранный предохранитель и цепь тока через его вставку показаны на рисунке 3.
Резьбовые предохранители с резьбой Е-27 изготовляют на токи 6, 10 16 и 20 А и напряжение до 380 В. Чтобы нельзя было установить пробки на большие токи, пробки и контактные винты к ним изготовляются разных размеров: пробка на меньший ток – длиннее, а винт к ней короче.
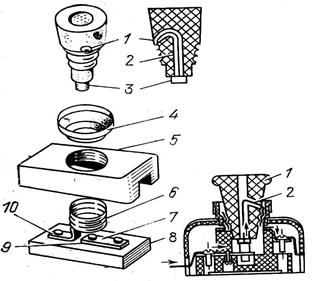
Рисунок 3.3 – Предохранитель резьбовой
Питающую линию присоединяют к контакту предохранителя 9
, отходящую – к винтовой резьбе 10
, что обеспечивает безопасность обслуживания. Если плавкая вставка перегорает, то ее починить невозможно. Поэтому в настоящее время широкое распространение нашли предохранители со сменными плавкими вставками.
Предохранители с закрытой фибровой трубкой
имеют цинковую плавкую вставку с одним или несколькими сужениями по длине, рисунок 3.4. На этих суженных участках выделяется большее количество теплоты, чем на широких. При коротких замыканиях нагревание суженных участков происходит настолько интенсивно, что отводом количества теплоты можно пренебречь.
Предохранители выпускаются на номинальный ток 6…1000 А и напряжение 220…500 В переменного и постоянного тока. На рисунке 3.4 представлен схематический разрез предохранителя ПР. На концах фиброй трубки 3
насажены обоймы 2
с наружной резьбой.
Рисунок 3.4 – Предохранитель ПР с закрытой фибровой трубкой
При расплавлении (сгорании) вставки материал фибровой трубки под воздействием высокой температуры дуги частично разлагается. Образующиеся в результате разложения фибры газы, состоящие из 40 % водорода, 50% углекислоты и 10% водяных паров, резко повышают давление внутри трубки до 2,94 МПа.
Высокая охлаждающая способность и достаточная электрическая прочность газов, заполняющих трубку, в сочетании с их большим давлением создают благоприятные условия для быстрого гашения дуги. При перегорании вставки в суженных ее местах широкие части падают вниз трубки, не расплавляясь, что значительно уменьшает количество паров металла и также способствует гашению дуги.
Продолжительность гашения в предохранителях ПР составляет всего несколько тысячных долей секунды, в результате чего в цепи, защищаемой этими предохранителями, создается эффект токоограничения. Работают они бесшумно, без выбросов частиц расплавленного металла, раскаленных газов и пламени.
К недостаткам предохранителей этого типа следует отнести их несколько высокую стоимость и необходимость периодически заменять фибровую трубку, которая срабатывается после двух-трех отключений больших аварийных токов.
В последние годы для защиты электрических установок постоянного и переменного тока широкое распространение нашли предохранители закрытого типа
, в которых в качестве наполнителя обычно используется тщательно очищенный и просеянный кварцевый песок.
В таких предохранителях плавкая вставка находится в кварцевом песке, заполняющем фарфоровую трубку (патрон) предохранителя. При расплавлении вставки и возникновения дуги последняя горит в узком канале, оставшемся от расплавившейся и испарившейся вставки.
Пары от расплавления проникают в окружающий кварц и им адсорбируются (поглощаются). Вследствие поглощения паров металла вставки сопротивление дуги увеличивается, а в результате непосредственно контакта с кварцем она интенсивно охлаждается, что приводит к быстрой ее деионизации и гашению.
Выпускают предохранители типов НПН и НПР, ПН-2. Предохранители НПН выполнены с неразборными патронами и рассчитаны на номинальные токи плавкой вставки 15…250 А. При сгорании плавкой вставки патроны заменяют. Их выполняют герметизированными.
Предохранители НПР и ПН-2 имеют разборный патрон, рисунок 3.5, они рассчитаны на номинальные токи 100…350 А при напряжении до 660 В.
Остановимся на терминах, относящихся к плавким предохранителям, и на выборе тока плавкой вставки для защиты электродвигателей и линий.
Номинальным током
предохранителя называют ток, равный наибольшему номинальному току плавкой вставки, которая может быть установлена на данном предохранителе. Значение его указывается на щитке предохранителя.
Номинальный ток
плавкой вставки Iном.вст.
– это тот ток, который вставка выдерживает неограниченно долго, не плавясь; значение его также указано на вставке.
Iпред.откл.
или разрывной мощностью Sразрыв
(Sпред. откл.
) называется соответственно максимальный ток или мощность короткого замыкания, которые способен разорвать (отключить) предохранитель.
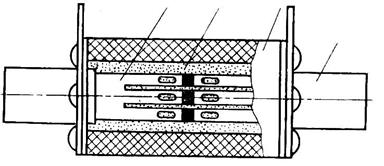
1
– основание предохранителя; 2
– плавкая вставка; 3
– контактная
пластина; 4
– наполнитель.
Рисунок 3.5 – Предохранитель ПН-2
При выборе тока плавкой вставки предохранителя, применяемого для защиты асинхронного короткозамкнутого двигателя, необходимо учитывать, что пусковой ток может в 7 – 8 раз превышать номинальный ток двигателя. Если номинальный ток плавкой вставки выбрать равным номинальному току двигателя, то при пуске двигателя вставка сгорит от перегрузки пусковыми токами за доли секунды. Поэтому вставки в этом случае выбирают в расчете на номинальный ток, равный
Так как пуск двигателя продолжается не более 8 с и его пусковой ток все время уменьшается, то вставка во временя пуска не сгорит. При тяжелых условиях пуска двигателей
Для электродвигателей с фазным ротором номинальный ток плавкой вставки выбирают, исходя из условий:
Iном. вст
> (1…1,25) Iном. двиг.
Предохранители на линиях выбирают с током плавкой вставки
Iном. вст
=
где первый член представляет сумму пусковых токов одновременно пускаемых потребителей, а второй – сумму номинальных токов всех остальных приемников при коэффициенте К, учитывающем одновременность включения потребителей и степень их затухания К = 0,65…0,7.
Автоматические выключатели (автоматы) служат для автоматического отключения цепей постоянного и переменного тока при перегрузках, коротких замыканиях и других нарушениях режима работы цепи. Но с их помощью можно в случае необходимости осуществлять и ручное выключение или включение соответствующих электрических установок.
При правильном их выборе обеспечивают более совершенную защиту, чем предохранители в электроустановках и электрических цепях переменного и постоянного тока напряжением до 500 В. Для выполнения этих функций автомат имеет контактную систему, замыкание и размыкание которой осуществляется вручную и с помощью рукоятки или кнопки.
Автомат отключается расцепителем, имеющим определенный ток срабатывания. Применяют расцепители тепловые, электромагнитные и комбинированные, состоящие из теплового и электромагнитного элементов, действующих на отключение независимо. В тепловых расцепителях используют биметаллические пластины.
При перегрузке в защищаемой сети один из концов биметаллической пластины изгибается и срабатывает механизм расцепителя, отключающий цепь. Автомат с электромагнитным расцепителем в каждой фазе имеет электромагнитное реле максимального тока. В случае превышения силы тока в защищаемой цепи выше установленного значения, определяемого силой тока уставки автомата, сердечник реле приходит в движение и с помощью механизма отключения выключает цепь.
Такое отключение называют отсечкой. В автоматах с комбинированным расцепителем на отключающий механизм воздействуют исполнительные органы как электромагнитного, так и теплового реле. При нарушениях режима работы цепи электромагнитный расцепитель отключает цепь в течение короткого промежутка времени.
Продолжительность срабатывания электромагнитных расцепителей практически не зависит от силы тока, при условии, что значение силы тока в цепи больше силы тока уставки расцепителя. Продолжительность же срабатывания автомата с тепловым расцепителем зависит от силы тока (при увеличении силы тока, проходящего через нагревательный элемент, время срабатывания расцепителя уменьшается).
Автомат работает следующим образом рисунок 3.6, а
.. Контролируемый ток I
протекает через контакт 1
автомата, нагреватель теплового реле 6
, катушку 9
реле максимального тока. При коротком замыкании в контролируемой цепи сердечника 10
максимального реле втягивается в катушку 9
и толкателем 8
воздействует на рычаг 5
.
Рисунок 3.6 – Схема автоматического выключателя
Аналогичным образом происходит отключение автомата при перегрузке цепи, когда ток в ней больше номинального (расчетного), но меньше тока короткого замыкания.
Пример схемы включения автомата QF для подключения и защиты трехфазного асинхронного двигателя приведен на рисунке 3.6, б
.
Достоинства автоматов по сравнению с предохранителями – одновременное отключение всех фаз сети, что исключает неполнофазые режимы, постоянная готовность к работе (не требуется замена сгоревших вставок, как у предохранителя).
Контактная система автоматов максимального тока обычно состоит из двух контактов на каждую фазу. Контакты рассчитаны на длительное обтекание рабочим током нагрузки и поэтому должны иметь минимальное переходное сопротивление. В большинстве конструкций они изготовлены в виде массивных медных пластин, которые с контактной стороны серебрят или приваривают к ним серебряные контактные пластинки.
Чтобы обеспечить необходимую дугогасительную способность автоматов, как при нормальном режиме, так и при режиме короткого замыкания, автоматы снабжают асбестоцементными или керамическими камерами со стальными дугогасительными решетками, см. рисунок 3.7.
а
– со стальными пластинами; б
– с пластинами из дугостойкого изоляционного материала; 1
– неподвижный контакт; 2
– пластины решетки; 3
– подвижный контакт.
Рисунок 3.7 – Дугогасительные решетки
Принцип действия камеры с решеткой следующий. Возникающая между контактами автомата дуга при отключении перемещается по этим контактам вверх (это перемещение вызвано конвекционным потоком воздуха и электродинамическими силами, действующими на дугу) и входит в камеру, где попадает в щель между расположенными перпендикулярно дуге стальными пластинами.
Дуга подобна проводнику с током, и, следовательно, ее охватывают силовые линии электромагнитного поля. Эти линии стремятся наиболее полно замыкаться по стали пластин, что вызывает дальнейшее затягивание дуги в щели решетки в верхнюю часть камеры. При этом длина дуги увеличивается, и она дробится на ряд коротких последовательно включенных дуг, горящих в щели между пластинами.
При соприкосновении с пластинами дуги интенсивно охлаждаются, при этом нарастает общее сопротивление дуги, и она гаснет, не выходя за пределы решетки. Такие решетки позволяют создавать автоматы, гасительная способность, которых достаточна для отключения токов короткого замыкания в несколько десятков тысяч ампер.
Автоматы, используемые для защиты электрических цепей от различных нарушений режима, называют универсальными.
Они разнообразны по конструкции и рассчитаны на широкий диапазон номинальных токов. Автоматы, предназначенные для защиты цепей только от перегрузок и токов короткого замыкания, называются установочными.
Автоматы выпускают с тепловыми Т
, электромагнитными М
, комбинированными МТ
и минимального напряжения Н
расцепителями. Наличие того или иного расцепителя у автомата может быть отражено в его условном обозначении.
Автоматические выключатели относятся к защитным аппаратам многократного действия. Их можно разделить на две группы: автоматы без регулировки силы тока уставки тепловых расцепитилей с регулировкой силы тока уставки расцепитилей. К нерегулируемым автоматам относятся выключатели серии А-3100, АЕ–1000, АЕ–2000, АК-63,АБ-25.
Выключатели серий АП-50, А-3700, АВ, АВМ – регулируемые. Автоматы А-3100, выпускаемые без расцепитилей, используют, как обычные коммутирующие аппараты и рассчитаны на 5
– 20
тыс. включений и отключений. Автоматы серии АЕ–2000, имеющие в каждом полюсе тепловые и электромагнитные расцепители.
Эти автоматы выпускают на токи от 10
до 100
А. Конструкции некоторых серий автоматов весьма сложны. Есть, например, автоматы с часовым механизмом, с электродвигательным приводом для включения, с гидравлическим замедлителем отключения расцепителя.
Устройство резьбового автоматического предохранителя типа ПАР показано на рисунке 3.3.3. При включенном автомате рисунок 3.8, а
ток проходит от центрального контакта 10
через неподвижные контакты 6
и 11
, соединенные контактным мостиком 5
, биметаллическую пластину 12
, гибкий проводник 14
и обмотку электромагнита 15
к резьбовой гильзе 7
.
Под действием тока нагрузки биметаллическая пластина нагревается и несколько изгибается, а в электромагните возникает сила, действующая на сердечник 16
и направленная вниз, внутрь электромагнита. Однако если сила тока не превосходит допустимую, ни изгибание пластины, ни усилие, возникающее в электромагните, не могут изменить положения деталей автомата, и он остается включенным.
При возникновении длительной перегрузки биметаллическая пластина изгибается, штифт 13
, связанный с нею, перемещается влево и переходит в положение, изображенное на рисунке 3.8,б
. При этом рычаг 4
соскакивает со штифта 13
, пружина 9
выталкивает вверх деталь 8
, рычаг поворачивается вокруг оси 0
, и благодаря этому автомат отключается. После того как биметаллическая пластина остынет, автомат снова может быть включен.
Чтобы включить автомат, нужно нажать кнопку 1
, при этом рычаг 4
повернется вокруг оси 0
и займет положение, показанное на рисунке 3.8, а
, контакты 6
и 11
замкнутся, а механизм во включенном положении будет зафиксирован благодаря тому, что левый конец рычага удерживается штифтом 13
, а правый – защелкой 3
.
При коротком замыкании явления протекают иначе: резкое и значительное возрастание силы тока вызывает втягивание сердечника 16
вниз, защелка 3
при этом поворачивается вокруг оси 01
, освобождает рычаг 4
, и автомат мгновенно отключается. Такое мгновенное отключение, как уже говорилось, носит название отсечки.
Пружина 17
определяет необходимое положение защелки 3
и сердечника 16
электромагнита. Пружина 18
создает контактное нажатие.
Рисунок 3.8 – Устройство и принцип действия простейшего автоматического выключателя
Выбор автоматических выключателей
. Номинальный ток автоматического выключателя с тепловым расцепителем выбирается по длительному расчетному току защищаемой линии
где Iдал
=Iном.дв.
для одиночного электродвигателя и Iдл
= Iрасч.
для группы электродвигателей.
Ток отсечки (срабатывания) электромагнитного или комбинированного расцепителя проверяют по максимальному кратковременному (пиковому) току линии.
где Iср.эл.
– ток отсечки расцепителя, А;
k
– коэффициент, учитывающий разброс характеристики расцепителей автоматического выключателя.
Для автоматических выключателей серии А – 3100, АЕ – 2000 значение k
принимается 1,4. Для автоматов других серий при отсутствии паспортных данных можно принимать k
= 1,25…1,3.
Ток Iпик.
ответвления, питающего одиночный двигатель, принимают равным пусковому току. Ток Iпик
для линии, питающей группу (более трех) токоприемников, определяют по формуле:
где ![]()
![]()
![]()
Встроенная температурная защита
обмоток статора электродвигателей (УВТЗ
).
Тепловая защита электродвигателей, осуществляемая с помощью тепловых реле, работает надежно только тогда, когда нагревательные элементы реле правильно выбраны и регулярно настраиваются в соответствии со значительными изменениями температуры окружающей среды.
При нарушении этих условий, а также работе двигателя с резкопеременной нагрузкой, большим числом включений в час и плохой вентиляцией обмоток двигателя защита с помощью тепловых реле может оказаться недостаточно надежной и обмотки двигателя достигнут опасной температуры.
В этом случае следует применять встроенную температурную защиту УВТЗ. В ее устройстве содержатся специальные элементы – датчики (подробно рассмотрены ниже), которые воспринимают значение температуры обмоток двигателя и изменяют при этом свои свойства, что и используется в конечном итоге для отключения двигателя, когда температура его обмоток приближается к опасному значению.
1 – СТ14-15; 2 – СТ14-1А
Рисунок 3.9 – Температурные характеристики позисторов
Рисунок 3.10 – Принципиальная электрическая схема УВТЗ
В качестве датчиков УВТЗ используют полупроводниковые резисторы (позисторы) СТ14-15 и СТ14-1А, проводимость которых скачкообразно уменьшается при температурах 105 и 130 о
С соответственно. Позисторы встраиваются в лобовые части каждой фазной обмотки и соединяются последовательно. Температурные характеристики позисторов приведены на рисунке 3.9.
На рисунке 3.10 изображена схема УВТЗ, предназначенного для использования совместно с магнитным пускателем в трехфазных сетях напряжением 220/380 В.
Рисунок 3.11 – Схема включения УВТЗ
При нагреве электродвигателя при его работе под нагрузкой нагреваются и позисторы Rt
, а их сопротивление увеличивается. При температурах ниже 105…135 о
С увеличение сопротивления позистора Rt
незначительно. Транзистор VT2 при этом открыт, VT1 – закрыт, а на управляющем электроде тиристора VS будет потенциал, положительный относительно катода.
Тиристор откроется, сработает реле KV, которое своим контактом включит катушку магнитного пускателя, управляющего электродвигателем. При увеличении температуры обмоток электродвигателя выше допустимой сопротивление позисторов резко возрастает, в результате чего транзистор VT2 закроется, а VT1 – откроется.
Закрытый транзистор VT2 отключит ток управления тиристором VS, и он закроется. Катушка реле обесточится, а его контакты разорвут цепь питания катушки магнитного пускателя, который отключит электродвигатель. При обрыве цепи датчиков температуры устройство не позволит включить электродвигатель в сеть. На рисунке 3.11 показана схема включения УВТЗ в схему управления трехфазным асинхронным двигателем.
Устройства встроенной температурной защиты обеспечивают более эффективную защиту электродвигателей от перегрузки, чем тепловые реле, которые являются устройствами косвенного действия, поэтому их настройка не всегда соответствует истинной температуре обмоток.
Устройство защиты электродвигателя и других потребителей трехфазного тока от неполнофазных режимов
. Для защиты электродвигателей, тиристорных преобразователей и других трехфазных потребителей применяются реле контроля фаз ЕЛ-8, ЕЛ-10 и др. Эти устройства реагируют на обрыв одной фазы, асимметрию междуфазных напряжений и обратное чередование фаз.
На рисунке 3.12 Приведена функциональная схема реле ЕЛ-10. Устройство содержит пороговый блок (ПБ), включающий три пороговых элемента: логическую схему (ЛС), состоящую из триггеров Т1, Т2, схема «И» и дифференцирующей RC
-цепи; схему временнóй задержки (СВЗ); выходное устройство, состоящее из транзистора VT и реле KV.
Рисунок 3.12 – Функциональная схема реле ЕЛ-10
Если напряжения всех фаз на входе реле находятся в допустимых пределах, то на выходах порогового блока появляются последовательности импульсов, соответствующие частоте и порядку чередования фаз трехфазного напряжения. На выходе логической схемы последовательность импульсов будет только в том случае, если на входы реле подано трехфазное напряжение с прямым порядком чередования фаз.
При недопустимых отклонениях фазных напряжений, обрыве фазы, нарушении чередования фаз на выходе логической схемы исчезает последовательность импульсов и по истечении выдержки времени элемент задержки выдаст сигнал на отключение выходного реле.
Преимуществом реле ЕЛ-10 является простота включения в схемы защиты симметричных трехфазных электроприемников различной мощности, недостатком – то, что контроль неполнофазного режима обеспечивается только до места подключения фазного режима обеспечивается только до места подключения реле, в то время как фазовая токовая защита реагирует на исчезновение тока в любом месте питания трехфазного потребителя.
Система электронной бесконтактной защиты (СиЭЗ) предназначена для защиты трехфазных электродвигателей переменного тока с короткозамкнутым или фазным ротором с номинальным напряжением не более 380 В мощностью от 3 до 45 кВт при следующих аварийных режимах:
· обрыв любого из фазных проводов;
· увеличение силы тока двигателя выше заданного значения;
· затормаживание ротора электродвигателя;
· асимметрия напряжений фаз электросети более 15%.
По требованию заказчика система может быть дополнительно оборудована:
· функцией предпускового контроля сопротивления изоляции электродвигателя;
· выносными датчиками температуры;
· защитой от уменьшения силы тока нагрузки ниже номинальной (холостой ход).
Преимуществами данного устройства по сравнению с выпускаемыми аналогичными устройствами защиты являются:
· полная совместимость изделия с ранее выпускаемыми коммутационными аппаратами; монтаж устройства может осуществляться на место теплового реле;
· простота настройки и обеспечение контроля аварийных режимов с помощью светодиодов;
· возможность (по желанию заказчика) индивидуальной настройки.
Краткие технические характеристики СиЭЗ: отключение электродвигателя происходит при превышении силы номинального тока в 1,5 раза за 20 с; при увеличении силы тока электродвигателя сверх номинальной в 3,5 раза отключение его от сети питания происходит за 5 с; предел допустимого значения основной погрешности тока срабатывания и времени задержки срабатывания выходного релейного каскада не превышает ±10%; при обрыве любого из фазных проводов отключение электродвигателя происходит за время не более 2 с; отключение электродвигателя происходит при достижении температуры статорной обмотки не более 1.
1Ткл
, где Ткл
– температура классификационная, соответствующая допустимым температурам разогрева изоляции электрических машин; диапазон рабочих температур -40 о
С… 55 о
С; вид климатического исполненияУХЛ4.04; степень защиты изделия IP40; габаритные размеры 70х82х100 мм; масса не более 0,4 кг; по желанию пользователя может быть введена функция контроля количества пусков электродвигателя.
Реле максимального тока
мгновенного действия применяют в схемах защиты электроустановок (электрических машин, трансформаторов, линий электропередачи) при коротких замыканиях и перегрузках. Электромагнитные реле тока включаются или непосредственно в сеть, или во вторичные цепи трансформатора тока, см. рисунок 3.16.
Размыкающие контакты этих реле включены в цепь катушки КМ линейного контактора. Обмотки реле рассчитаны на длительное протекание рабочего тока и кратковременное – аварийного. Коэффициент возврата реле, равный отношению тока отпускания реле к току срабатывания, должен приближаться к единице. Реле максимального тока имеют Кв![]()
Конструкция реле тока серии ЭТ-520 показана на рисунке 3.13. Реле данной серии делятся на три группы: ЭТ-521 – с одним замыкающим контактом; ЭТ-522 – с одним размыкающим контактом и ЭТ-523 – с одним замыкающим и одним размыкающим контактами. Ток срабатывания реле регулируется натяжением пружины 2
.
Обмотка 1
расположенная на сердечнике состоит из двух секций, что позволяет последовательным или параллельным включением секций изменять пределы регулирования тока срабатывания. При соединении обеих катушек параллельно значение уставки соответствует указанному значению на шкале, при соединении последовательно величина тока уставки уменьшается на половину, рисунок 3.11.
Якорь 3
поворачивается и контактный мостик 5
замыкает неподвижные контакты 4
, чем обеспечивается подача отключающего импульса на защищаемый элемент. Уставка реле устанавливается по шкале с помощью указателя уставки 6.
1 – обмотка; 2 – пружина; 3 – якорь; 4 – неподвижный контакт; 5 – подвижный контакт; 6- указатель уставки
Рисунок 3.13 – Реле серии ЭТ-520
Верхний предел уставок для каждого типа реле обозначается в виде знаменателя дроби, числителем которого является обозначение соответствующей группы реле, например реле типа ЭТ-521/6, которое имеет один замыкающий контакт и верхний предел уставки тока срабатывания, равного 6 А при соединении обеих катушек параллельно или 3 А при последовательном их соединении.
Время действия реле составляет примерно 0,02 – 0,4 с, потребление равно 0,1 В·А на минимальной уставке, коэффициент возврата – не менее 0,85.
На рисунке 3.14 приведена конструкция токового реле серии РТ-40 с поперечным движением якоря. В реле этой серии улучшена контактная система. Потребление на минимальной уставке у различных реле этой серии находится в пределах от 0,2 до 8 В·А.
Рисунок 3.14 – Схема соединения обмоток реле максимального тока
Конструкции электромагнитных реле напряжения аналогичны конструкциям, приведенным на рисунках 3.13 и 3.15. Промышленностью выпускаются реле напряжения серий ЭН-520 и РН-50, которые подключаются или непосредственно на напряжение сети, или через трансформаторы напряжения.
Рисунок 3.15 – Реле серии РТ-40
Рисунок 3.16 – Схема включения реле максимального тока
Контрольные вопросы
1. Каков принцип действия и назначение теплового реле?
2. Как выбирают и настраивают тепловые реле?
3. Как устроены и работают плавкие предохранители и каково их назначение?
4. Что называется номинальным током предохранителя?
5. Что такое номинальный ток плавкой вставки предохранителя?
6. Как выбрать номинальный ток плавкой вставки для защиты потребителей?
7. Поясните принцип действия автоматического выключателя.
8. Условие выбора автоматических выключателей.
9. В чем состоят преимущества автоматических выключателей по сравнению с плавкими предохранителями?
10. Как устроены и работают реле максимального тока?
11. Как настраивают реле максимального тока?
Для электропитания задатчиков, регуляторов, различных электронных и электромагнитных устройств автоматики используют источники питания переменного и постоянного тока. Они должны обеспечивать стабильность тока I
, напряжения U
, частоты f
и других величин и параметров.
Различают источники питания переменного тока, работающие на промышленной f
= 50 Гц (рисунок 4.1, а
) и несущей частотах (рисунок 4.1, б
) (повышенной – f
= 400, 600 Гц и высокой – десятки, сотни и тысячи килогерц).
а
– на промышленной частоте 50 Гц; б
– на несущей частоте; в
– постоянного тока.
Рисунок 4.1 – Схемы источников питания
Напряжение в источниках питания переменного тока промышленной частоты стабилизируется параметрическим стабилизатором СТ
(полупроводниковыми стабилитронами, феррорезонансными стабилизаторами) или компенсационными стабилизирующими системами с отрицательной обратной связью.
Источники питания постоянного тока обычно состоят из трансформатора Т
, выпрямителя В
, фильтра Ф
и стабилизатора СТ
(рисунок 4.1, в
). В зависимости от условий работы и назначения в источнике питания могут отсутствовать некоторые элементы, за исключением выпрямителя.
Для поддержания постоянства напряжения на нагрузке при изменяющихся напряжении промышленной сети и токе нагрузке в источниках постоянного тока используют полупроводниковые стабилизаторы напряжения. Например, для питания большинства логических элементов (интегральных микросхем), применяющихся в системах электроавтоматики, необходимо напряжение питания Uпит
= 5В ± 5%, тогда как напряжение питающей промышленной сети переменного тока соответствует U
= 220 ± 10%.
Для преобразования переменного тока в постоянный используют схемы однополупериодного и двухполупериодного выпрямления на полупроводниковых диодах. Однополупериодные схемы выпрямления (рисунок 4.2, а
) характеризуется:
средним напряжением на нагрузке
Uн.ср.1 = 0,45 U2
,
где U2
– напряжение вторичной обмотки трансформатора;
максимальным обратным напряжением на диоде
Uобр. max.1
= ![]() U2
U2
= U2max
,
где U2max
– амплитуда напряжения U2
;
средним током через диод
Iн.ср.1 = Uн.ср./Rн
,
где Rн
– сопротивление нагрузки.
а
– однополупериодные; б
, в
– двухполупериодные
Рисунок 4.2 – Схемы выпрямления источников постоянного тока
Двухполупериодные схемы выпрямления для схемы, показанной на рисунке 4.2, б
, характеризуется следующими соотношениями:
Uн.ср. = 2![]() U2/π = 0,9 U2;Uобр. max2 = 2
U2/π = 0,9 U2;Uобр. max2 = 2![]() U2 = 2 U2 max
U2 = 2 U2 max
Uн. ср 2 = Uн. ср/(2Rн).
Для схемы, показанной на рисунке 4.1.1, в
, максимальное обратное напряжение на диоде в два раза меньше в сравнении со схемой, показанной на рисунке 4.2, б
:
Uобр. max
= U2 max
.
Пульсация выпрямленного тока характеризуется коэффициентом пульсации
q
= Uн. max
/ Uн.ср.
Для однополупериодного и двухпериодного выпрямителей соответственно q1п
= 1,57
, q2п
= 0,67
. Для сглаживания пульсации на выходе выпрямителя устанавливают фильтр. Наиболее эффективными являются LC
-фильтры, рисунок 4.3, а, б
.
а
– Г-образный; б
– П-образный
Рисунок 4.3 – Схемы сглаживающих RC-фильтров
Для расчета фильтра задаются коэффициентом пульсации на выходе фильтра, который много меньше единицы (q0
<<1). Коэффициент пульсации на входе фильтра
q1 = 2/(m2 – 1)
,
где m
– число фаз выпрямителя. При m = 2
коэффициент q1 = 2/3
.
Коэффициент сглаживания фильтра
k
= q1/ q0
.
По значению коэффициента сглаживания определяется произведение емкости и индуктивности фильтра (Гн·Ф) или (Гн·мкФ)
LC = k/10000
;
LC = k·102
.
Если LC
> 500 Гн мкФ, то рекомендуется использовать два последовательно соединенных одинаковых LC –
фильтра. Выбирая C
= 10 ÷ 100 мкФ, находят индуктивность L
, которая вместе с током нагрузки Iн
определяет габаритные размеры дросселя.
Основными возмущениями, действующими на величину напряжения устройств электроавтоматики, является нестабильность сетевого напряжения и изменение величины нагрузки. Для поддержания стабильных напряжений и силы тока используются устройства, называемые стабилизаторами
переменного и постоянного тока, которые подразделяются на параметрические и компенсационные.
При параметрической стабилизации используется нелинейная зависимость между силой и напряжением в газоразрядных и кремниевых стабилитронах. В компенсационных устройствах стабилизация достигается за счет контроля уровней стабилизируемых величин посредством воздействия обратных связей.
Стабилизаторы характеризуются коэффициентом стабилизации по напряжению либо силе тока, показывающим, во сколько раз относительное изменение напряжения или силы тока на входе стабилизатора выше относительного изменения напряжения или силы тока на его выходе:
Ки
= (ΔU1
/ U1
) / (ΔU2
/ U2
); К1
= (ΔI1
/ I1
) / (ΔI2
/ I2
), (4.2.1)
где U1
, U2
– напряжение на входе и выходе стабилизатора, В; ΔU1
, ΔU2
– изменения напряжения на входе и выходе стабилизатора, В; I1
и I2
– сила тока соответственно на входе и выходе стабилизатора, А;
Рассмотрим принцип действия параметрического стабилизатора напряжения, включающего нелинейный элемент. В качестве нелинейных элементов чаще всего используется полупроводниковые стабилитроны.
Простейшая схема параметрического стабилизатора напряжения приведена на рисунке 4.4, а
. Стабилитрон подключен параллельно нагрузке. Увеличение напряжения U1
вызывает возрастание силы тока нагрузки и, значит, напряжение на стабилитроне.
Происходит резкое увеличение падения напряжения на сопротивлении R
1. Вследствие этого напряжение на нагрузке Rн
вернется к прежней величине. Аналогичная картина наблюдается при изменении величины нагрузки Rн
.
а
– параметрического (напряжения); б
– параметрического (тока); в
– компенсационного (с непрерывной регулировкой напряжения)
Рисунок 4.4 – Схемы стабилизаторов
В параметрическом стабилизаторе силы тока, рисунок 4.4, б
в качестве стабилизирующих элементов используются транзисторы, а также бареттеры. Бареттер Б
представляет собой чаще всего вольфрамовую нить, запаянную в герметический баллон с водородом.
При увеличении температуры, например, от величины силы тока сопротивление нити бареттера возрастает, что позволяет стабилизировать напряжение на зажимах нагрузки Rн
. Бареттеры могут использоваться в стабилизаторах как постоянного, так и переменного тока.
В компенсационном стабилизаторе напряжения, рисунок 4.4, в
при увеличении напряжения U1
сила тока Iн
увеличивается. При этом напряжение базы Uб1
транзистора Т
2 усилителя уменьшается, сила тока транзистора Т
2 увеличивается и потенциал коллектора этого транзистора, равный потенциалу базы транзистора Т
1, также увеличивается.
В результате этого регулирующий транзистор Т
1 еще больше запирается, его сопротивление возрастает и падение напряжения на регулирующем транзисторе увеличивается, возвращая почти к прежней величине выходное напряжение. В схеме усилитель на транзисторе Т2
питается от дополнительного источника напряжением U2
коэффициент стабилизации такого стабилизатора Кст
> 100.
В качестве источников питания электрических элементов широко применяются электромагнитные стабилизаторы напряжения. Основные виды стабилизаторов трансформаторного действия: ферромагнитные и феррорезонансные (содержащие емкость).
Ферромагнитный стабилизатор напряжения представляет собой трехстержневой магнитопровод, на среднем стержне которого расположена первичная обмотка ω1
, рисунок 4.5, а
. На правом стержне, работающем в условиях сильного магнитного насыщения, расположена вторичная обмотка ω2
.
На левом ненасыщенном стержне расположена компенсационная обмотка ωк
. При колебаниях напряжения U1
на входе стабилизатора изменяется магнитный поток в среднем стержне, но поток в правом стержне изменяется незначительно, т.к. стержень насыщен.
Поэтому колебания напряжения U’2
на выходе вторичной обмотки стабилизатора (кривая 1
на рисунке 4.5, б
) незначительны и компенсируются напряжением Uк
компенсационной обмотки, зависимость которого от напряжения U1
имеет вид прямой линии, т.к. левый стержень стабилизатора ненасыщен (прямая 2
на рисунке 4.
5, б
). При правильном подборе параметров обмоток и магнитопровода стабилизатора угол наклона α прямолинейного участка кривой 1
равен углу наклона прямой 2
. В этом случае напряжение на выходе оказывается стабилизированным:
Рисунок 4.5 – Электромагнитная схема ферромагнитного стабилизатора напряжения и графики напряжений
Так, при колебаниях напряжения U1
в пределах ±20% от номинального значения при неизменных нагрузке и частоте выходное напряжение колеблется в пределах ±3%, т.е. коэффициент стабилизации по напряжению k ≈ 7. Обычно для ферромагнитных стабилизаторов: небольшой коэффициент стабилизации по напряжению, низкий КПД (не более 4 – 60%),небольшой коэффициент мощности (не более 0,4), несинусоидальное выходное напряжение. Указанные недостатки ограничивают применение ферромагнитных стабилизаторов напряжения.
Феррорезонансный стабилизатор напряжения обладает лучшими свойствами, рисунок 4.6, а
. Он состоит из реактора 1
, магнитопровод которого при заданном диапазоне напряжений U1
насыщен, конденсатора C
, автотрансформатора 2
, магнитопровод которого ненасыщен. Обмотка автотрансформатора 2
включена так, что напряжение на выходе стабилизатора
где ![]()
![]() а
а
.
Рисунок 4.6 – Электромагнитная схема феррорезонансного стабилизатора напряжения и графики напряжений
Напряжение ![]() L1C
L1C
, где L1
– индуктивность реактора, имеет резко нелинейную зависимость от напряжения U1
(кривая 1 на рисунке 4.6, б
). Напряжение ![]() U1
U1
(прямая 2
) и компенсирует изменение напряжения ![]() 1
1
. При этом условии напряжение на выходе стабилизатора Uст
изменяется незначительно при заданном диапазоне колебания напряжения на входе стабилизатора (кривая 3
). Коэффициент полезного действия феррорезонансного стабилизатора достаточно высок и составляет 80 – 85%, а коэффициент стабилизации по напряжению kU
= 20 ÷ 40.
К недостаткам феррорезонансных стабилизаторов относится заметная зависимость коэффициента стабилизации от частоты тока в сети и от коэффициента мощности нагрузки. Указанные недостатки в этом стабилизаторе проявляются в меньшей степени, чем в ферромагнитном стабилизаторе.
Широкое распространение в промышленности получила схема источника питания, построенная на кремнистом стабилитроне, рисунок 4.7, а
. В ней для увеличения коэффициента стабилизации используется мостовая схема включения стабилитронов. Резисторы R1
и R3
обычные, типа МЛТ, сопротивления R2
, R4
– R7
должны быть проволочными, причем сопротивление R4
, используемое для температурной компенсации, выполняется из медного провода.
При увеличении температуры окружающей среды растет напряжение стабилизации и одновременно увеличивается сопротивление медного провода, что при соответствующем выборе параметров схемы обеспечивает стабилизацию тока нагрузки. Схема позволяет получить коэффициент стабилизации не менее 150. подобная схема используется в источниках питания типа ИПС-60, имеющем коэффициент стабилизации 300, обеспечивает силу тока 6 мА при номинальном сопротивлении нагрузки 173 Ом.
а
– ИПС-06; б
– двухкаскадная; в
– «Электроника17»
Рисунок 4.7 – Принципиальные схемы источников питания вторичных приборов
В целях улучшения характеристик стабилизатора можно использовать двухкаскадную схему включения стабилитронов, рисунок 4.7, б
. Первый каскад стабилизации построен на двух стабилитронах Д1
и Д2
, второй каскад – на стабилитроне Д6
.
В качестве термокомпенсирующих элементов в схеме используются германиевые диоды типов Д7Г, Д7Ж или стабилитроны, включенные в прямом направлении, имеющие отрицательный температурный коэффициент. Коэффициент стабилизации таких стабилизаторов составляет примерно 2000. изменение выходного напряжения, равного 8,82 В при силе тока 5 мА, при изменении температуры окружающей среды в диапазоне 20 – 60 0
С не превышает ±0,0005% на 1 0
С.
Если для питания измерительной схемы требуется мощность большая, чем могут обеспечить кремниевые стабилитроны, то в качестве силового регулируемого элемента используется полупроводниковые триоды, рисунок 4.7, в
. Опорными элементами в схеме прибора «Электроника17» служат кремниевые стабилитроны, в качестве усилительного и силового – полупроводниковые триоды с проводимостью типа n-p-n
и p-n-p
.
Коэффициент стабилизации схемы около 1500, температурная нестабильность выходного напряжения 0,005% на 1 0
С. выходное стабилизированное напряжение равно 10 В при силе тока около 20 мА.
Стабилизированный источник питания ИП-8с, рисунок 4.8 может питать блоки квадраторов, функциональные преобразователи и другие элементы. В источнике питания ИП-8с имеется два раздельных параметрических стабилизатора на кремниевых стабилитронах СТ1
и СТ2
.
Рисунок 4.8 – Электрическая схема источника питания ИП-8с
Блок питания 22БП-36 осуществляет преобразование напряжения 220 В или 240 В переменного тока в стабилизированное напряжение 36 В (24В) постоянного тока. Предназначен для питания преобразователей типа «САПФИР-22М» в системах автоматического контроля, регулирования и управления технологическими процессами.
Конструкция блока питания представляет собой специальную раму (являющуюся одновременно несущим шасси), закрытую с двух сторон крышками.
На передней панели каждого блока питания расположены:
– тумблер включения сети 220 В;
– держатель сетевого предохранителя;
– светодиоды индикации включения (количество определяется вариантом исполнения блока питания);
– тумблеры включения соответствующих каналов (для двух-, четырех-, и восьмиканальных блоков питания).
На задней панели расположена клеммная колодка, предназначенная для подключения внешней питающей сети 220 (240) В и для электрического соединения блока питания с одним или несколькими измерительными преобразователями «САПФИР-22М».
На шасси установлены в зависимости от варианта исполнения блока питания один или два понижающих трансформатора, одна или две платы стабилизатора напряжения.
Электрическая схема одноканального блока питания, рисунок 4.9 включает в себя: понижающий трансформатор Т1
, выпрямительный диодный мост VS1
, предохранитель FU1
, лампа индикации включения блока HL1
, электронный стабилизатор напряжения.
Рисунок 4.9 – Принципиальная электрическая схема стабилизатора блока питания 22БП-36
Стабилизатор напряжения выполнен на микросхеме D1
, мощных транзисторах VT1
, VT3
, транзисторе VT2
.
Регулировка выходного напряжения стабилизатора осуществляется резистором R11
.
Работа схемы электрического стабилизатора напряжения заключается в следующем: на первичную обмотку трансформатора Т1
через предохранитель FU1
подается сетевое напряжение. С вторичной обмотки трансформатора пониженное напряжение подается на диодный выпрямительный мост VS1
.
С выходной диагонали моста выпрямленное напряжение подается через фильтр С1 на вход предварительного стабилизатора напряжения, собранного на транзисторах VT1
, VT2
, стабилитронах VD1
, VD2
и резисторах R1
, R2
, R3
, R4
.
Предварительно стабилизированное напряжение (39,5 ± 0,25) В подается на вход стабилизатора напряжения, собранного на микросхеме D1
, выходном транзисторе VT3
, стабилитроне VD3
, конденсаторах С2, С3 и резисторах R11
, R12
, R13
.
Конденсаторы С4
, С5
предназначены для фильтрации выходного напряжения.
Резисторы R5
, R6
, R7
, R8
, R9
, R10
совместно с элементами микросхемы D1
обеспечивает защиту стабилизатора напряжения по выходу от короткого замыкания и перегрузки.
Диапазон срабатывания защиты по току 250 ± 50 мА.
Ток короткого замыкания составляет 20 – 30 мА.
После устранения перегрузки или короткого замыкания автоматически восстанавливается нормальная работа блока питания.
С помощью резистора R11
осуществляется настройка выходного напряжения.
Блок питания одноканальный обеспечивает питанием три преобразователя, а двухканальный обеспечивает питанием шесть преобразователей «САПФИР-22М».
Контрольные вопросы:
1. Основное назначение источников питания в системах автоматического управления?
2. Поясните принцип работы компенсационного стабилизатора.
3. Какова разница между ферромагнитным и феррорезонансным стабилизаторами?
4. Назовите основные выходные параметры и требования к источникам питания в системах автоматического управления.
5. Поясните работу схемы блока питания 22БП36.
Исполнительные устройства в системах автоматического управления предназначены для приведения в действие (для привода) различных регулирующих органов, оказывающих непосредственное воздействие на объект управления с целью достижения выходной величиной этого объекта требуемого значения.
Для воздействия на регулирующие органы необходимо выполнить механическую работу: повернуть заслонку, переместить затвор регулирующего органа, соединить две половинки муфты и т.д. Входным сигналом исполнительного устройства является определенной величины и вида электрический ток или напряжение, а выходным – механическое перемещение.
Для преобразования электрической энергии в механическую служат электромагниты и электродвигатели. В данной главе будут рассмотрены только электромагнитные исполнительные устройства. Электродвигатели являются электрическими машинами и изучаются в соответствующем курсе.
Основное преимущество электромагнита – простота конструкции. У электродвигателя достоинств больше: высокий к.п. д., возможность получения широкого диапазона скоростей и перемещений. Эти преимущества проявляются только в сравнительно сложных системах автоматики и при продолжительном режиме работы.
В предыдущих главах уже рассматривались электромагниты, используемые как составная часть электромагнитных реле и контакторов. В данной главе будут рассмотрены общие вопросы классификации электромагнитов, их конструкция, принцип действия и область применения в качестве исполнительных элементов систем автоматики.
В зависимости от вида тока в обмотке электромагниты подразделяют на электромагниты постоянного и переменного токов, по скорости срабатывания – на быстродействующие, нормальные и замедленного действия. По назначению электромагниты разделяют на приводные и удерживающие.
Приводные электромагниты
служат для выполнения механической работы. При подаче питания они перемещают различные исполнительные устройства: клапаны, толкатели, заслонки, золотники.
Удерживающие электромагниты служат не для перемещения, а лишь для удерживания ферромагнитных деталей. Например, электромагнит, используемый при подъеме железного лома. В металлообработке используются электромагнитные плиты для фиксации обрабатываемой детали на станке.
По конструктивному выполнению различают клапанные (поворотные), прямоходовые и с поперечным движением.
Клапанные
электромагниты имеют небольшое перемещение якоря (несколько миллиметров) и развивают большое тяговое усилие.
Прямоходовые
электромагниты имеют большой ход якоря и большее быстродействие; меньшие размеры, чем клапанные. Они представляют собой соленоид (цилиндрическую катушку, втягивающую в себя ферромагнитный стержень), поэтому их называют соленоидными электромагнитами.
Конструкции электромагнитов показаны на рисунке 5.1. Они состоят из катушки 1
, якоря (подвижной части магнитопровода) 2
, неподвижного магнитопровода (сердечника 3
и ярма 4
).
Рисунок 5.1 – Варианты конструктивных схем электромагнитов
По форме магнитопровода различают электромагниты с П – , Ш – образным и цилиндрическим магнитопроводом.
Магнитопроводы электромагнитов постоянного тока обычно выполняются сплошными из магнитомягких материалов: обычных конструкционных сталей и низкоуглеродистых электротехнических сталей. Высокочувствительные электромагниты имеют магнитопровод из пермаллоев (сплавов железа с никелем и кобальтом).
Для уменьшения потерь на вихревые токи магнитопровод электромагнитов переменного тока собирают (шихтуют) из изолированных пластин толщиной 0,35 или 0,5 мм. В качестве материала используются горячекатаные и холоднокатаные электротехнические стали.
Катушки электромагнитов по своей конструкции бывают каркасные и бескаркасные, а по форме сечения – круглые и прямоугольные. Провод каркасной катушки наматывают на каркас из изоляционного материала (текстолит, гетинакс, пластмасса). Провод бескаркасной катушки наматывают прямо на сердечник, обмотанный изоляционной лентой, или на специальный шаблон.
Для обеспечения прочности катушки, выполненной на шаблоне, ее обматывают лентой (бандажируют) и пропитывают компаундным лаком. Катушки, как правило, наматывают медным проводом с изоляцией, выбираемой исходя из назначения и условий работы электромагнита.
Различают также электромагниты, предназначенные для длительной, кратковременной и повторно-кратковременной работы.
В системах электроавтоматики широко используются электромагнитные исполнительные элементы дискретного действия. Например, исполнительные электромагниты могут быть использованы для перемещения заслонки трубопровода, поворота вентиля, перемещение шестерни в коробке переключения передач и т.п. Т.о. электромагнит осуществляет преобразование электрической энергии в механическую, а следовательно, он является электромеханическим преобразователем энергии.
Основными параметрами электромагнита являются ход якоря и тяговое усилие на якоре.
Катушки электромагнитов по своей конструкции бывают каркасные и бескаркасные, а по форме сечения – круглые и прямоугольные. Провод каркасной катушки наматывают на каркас из изоляционного материала (текстолит, гетинакс, пластмасса). Провод бескаркасной катушки наматывают прямо на сердечник, обмотанный изоляционной лентой, или на специальный шаблон.
Электромагниты переменного тока при одинаковых габаритах с электромагнитами постоянного тока развивают тяговое усилие в два раза меньше. Рассмотрим устройство и работу некоторых видов исполнительных электромагнитов.
Электромагнитный тарельчатый клапан
, рисунок 5.2 применяют для управления потоком жидкости. Он состоит из прямоходового электромагнита постоянного тока с коническим стопом и запорного устройства, расположенного в общем корпусе 3
.
При отключенной катушке электромагнита тарель 10
действием запорной пружины 2
прижата к соплу 11
и поток жидкости перекрыт. При подаче напряжения на обмотку 5
якорь 8
втягивается, сжимая запорную пружину 2
, и освобождает тарель 10
, которая под действием пружины 1
и давления жидкости поднимается и открывает сопло 11
.
Жидкость заполняет полость клапана и выходит через отверстие 9
. Для закрытия клапана необходимо отключить обмотку электромагнита. Для регулировки величины хода клапана в пределах немагнитного зазора 7
служит регулировочный винт 6
, фиксирующий положение конического стопа 4
.
Рисунок 5.2 – Электромагнитный клапан
Электромагнит с преобразованием движения
. При необходимости получить на выходе электромагнита вращательное движение в пределах ограниченного угла электромагнит дополняют передаточным механизмом, рисунок 37.2, состоящим из зубчатого сектора 3
и зубчатого колеса 4
.
Здесь применен прямоходовый электромагнит постоянного тока с плоским стопом с сердечником цилиндрической формы. При подаче напряжения на катушку 1
якорь 2
втягивается и посредством тяги, преодолевая противодействие пружины 5
, поворачивает сектор 3
вокруг оси 0
.
Сектор 3
, находясь в зацеплении с зубчатым колесом 4
, вызывает его поворот на угол, определяемый величиной хода якоря 2
. При этом пружина 5
растягивается. При отключении катушки 1
действием пружины 5
сектор 3
возвращается в исходное положение, вновь поворачивая колесо 4
, но теперь уже в обратном направлении.
|
|
Рассмотренные электро
Рассмотренные электромагниты являются короткоходовыми.
На рисунке 5.4 показана конструкция длинноходового электромагнита
постоянного тока.
При подключении катушки 4
якорь 1
под действием тягового усилия перемещается вверх вместе с устройством, прикрепленным к его хвостовику 7
. Амортизационная прокладка 2
смягчает удар якоря о верхнюю крышку 3
.
Электромагнитный тормоз
. Для предотвращения самопроизвольного вращения (движения) каких-либо элементов электропривода при отключенном приводном двигателе, а также для ограничения свободного выбега двигателя применяют механические колодочные тормоза.
Наибольшее применение получили колодочные тормоза
, в которых торможение происходит за счет прижатия колодок к тормозному шкиву (барабану), закрепленному на валу, самопроизвольное вращение которого необходимо предотвратить. Сила, прижимающая колодки 1
к тормозному шкиву 3
, создается сжатой пружиной 6
.
Рисунок 5.5 Устройство колодочного тормоза
При включении приводного двигателя должно произойти растормаживание, для чего необходимо сжать пружину 6
и освободить тормозные колодки. В рассматриваемом тормозном устройстве для этого необходимо приложить силу F
к рычагу 4
(стрелка на рисунке).
При этом пружина остается сжатой между стойкой 7
и запорной шайбой 5
и колодки 1
освободят тормозной шкив 3
. В зависимости от того, чем будет создано растормаживающее усилие F
, тормоза бывают электромагнитными, гидравлическими или пневматическими.
Наибольшее распространение в САУ находят электромагнитные тормоза
, в которых растормаживающее усилие создается за счет тягового усилия на якоре 5 электромагнита 4, рисунок 5.6. Поэтому одновременно с включением приводного двигателя включается обмотка электромагнита и тяговым усилием на его якоре раздвигают стойки 3
, освобождая от колодок 2
шкив 1
. В тормозах используют как электромагниты постоянного (серия тормозов ТКП), так и переменного тока (серия тормозов ТКТ).
Рисунок 5.6 Электромагнитный тормоз
Электромагнитная муфта предназначена для передачи вращающего момента двигателя к рабочему механизму. Принцип их действия основан на электромагнитных свойствах связываемых элементов. Муфта состоит из двух частей: ведущей и ведомой, которые образуют замкнутую магнитную систему.
Ниже рассматриваются три вида электромагнитных муфт, получивших наибольшее применение в САУ: фрикционная (контактная и бесконтактная), порошковая и асинхронная (муфта скольжения).
В контактной электромагнитной фрикционной муфте
передача вращающего момента с ведущей полумуфты на ведомую происходит за счет сил трения между контактирующими поверхностями фрикционных дисков, из которых один расположен на ведущей полумуфте, а другой – на ведомой. Эти диски изготовлены из материала с высоким коэффициентом трения.
Рисунок 5.7 Электромагнитная фрикционная муфта
Устройство электромагнитной фрикционной муфты показано на рисунке 5.7 через контактные кольца 2
и щетки 4
напряжение управления муфтой Uу
подводится к катушке 5
. Возникший при этом ток в катушке наводит в магнитной системе муфты поток Ф.
Замыкаясь через якорь, роль которого выполняет ведущая полумуфта 9
, этот поток создаст на нем тяговое усилие. Крепление якоря (ведущая полумуфта) на валу таково, что оно допускает небольшое осевое перемещение. В результате якорь 9
, преодолев сопротивление возвратной пружины 7
, упирающейся в кольцо 6
, окажется притянутым к сердечнику 1
(ведущая полумуфта) и поверхности фрикционных дисков 10
сомкнутся.
При этом вращение с ведущего вала 8
передается на ведомый вал 3
за счет сил трения между фрикционными дисками. При необходимости отключить муфту следует снять напряжение с контактных щеток. При этом под действием пружины 7
якорь сместиться в право, а поверхности фрикционных дисков разомкнутся и вращение ведомого вала прекратиться.
Основной недостаток рассмотренной муфты – наличие скользящего контакта «щетки – контактные кольца», что снижает надежность муфты.
Бесконтактная электромагнитная фрикционная муфта
состоит из трех основных элементов, рисунок 5.8. Неподвижный элемент 2
с катушкой 3
посажен на ведомый вал через шарикоподшипник 1
.
Благодаря такой конструкции при передаче вращения на ведомый вал эта часть муфты остается неподвижной, что позволяет катушку 3
непосредственно включать в сеть, не применяя скользящих контактов, как это сделано в контактной фрикционной муфте, рисунок 37.1.
Элемент 5
представляет собой ведущую полумуфту, посаженную на ведущий вал посредством шпонки 6
. Конструкция этого элемента аналогична ведущей полумуфте контактной фрикционной муфты, т.е. он имеет возможность небольшого осевого перемещения, преодолевая сопротивление возвратной пружины (на рисунке 39.2 не показана).
Элемент 4
рассматриваемой муфты является промежуточным способным благодаря шпонке 7
передать вращение на ведомый вал, т.е. этот элемент представляет собой ведомую полумуфту. При включении катушки 3
в сеть в магнитной системе муфты, составленной из трех элементов, возбуждается магнитный поток Ф, замыкающийся по контуру Ф и создающий на ведущей полумуфте 5
, являющейся якорем электромагнита, тяговое усилие, которое смещает эту полумуфту влево вдоль ведущего вала.
При этом фрикционные диски смыкаются, и вращающийся момент с ведущего вала передается на ведомый вал. Чтобы магнитный поток не замыкался в промежуточном элементе 4
, что нарушило бы работу муфты, этот элемент имеет «окна» по периметру цилиндрической катушки 3
.
Рисунок 5.8 Бесконтактная электромагнитная фрикционная муфта
Для уменьшения магнитных потерь во вращающихся частях бесконтактной муфты эти части иногда делают шихтованными. Бесконтактная электромагнитная муфта сложнее и дороже контактной, но отсутствие в ней скользящего контакта делает ее более надежной.
Промышленность выпускает электромагнитные фрикционные муфты серии Э1ТМ. Муфты рассчитаны на включение в сеть постоянного тока напряжением 24 В и имеет степень защиты IP00.
Основные характеристики электромагнитных муфт: Мном
– передаваемый вращающий момент; nном
– номинальная частота вращения; nmax
– предельно допустимая частота вращения; Р20
– мощность, потребляемая катушкой электромагнита в холодном состоянии (при температуре 20° С).
Принцип действия электромагнитной порошковой муфты основан на свойстве жидкого или порошкообразного ферромагнитного вещества (наполнителя муфты) под действием магнитного поля увеличивать свою вязкость и прочно прилипать к стенкам намагниченных элементов.
В принципе порошковая муфта является фрикционной. Однако, в отличие от последней, передача вращающего момента от ведущей части муфты к ведомой в порошковой муфте происходит не за счет сил трения сжимаемых поверхностей, а за счет повышения вязкости ферромагнитного наполнителя муфты.
Рисунок 5.9 Электромагнитная порошковая муфта
На рисунке 39.3 показано устройство контактной порошковой муфты. Ведущая часть муфты состоит из зубчатого колеса 1
, полого ферромагнитного стального цилиндра 3
и крышки 7
. Ведомая часть муфты состоит из ведомого вала 9
, на котором жестко закреплен ферромагнитный сердечник 2
с катушкой 4
.
Питание в катушку подается через контактные кольца 8
и щетки. Провода, соединяющие кольца 8
с катушкой 4
, прокладывают по поверхности вала 9
. При подаче напряжения на катушку магнитный поток Ф, замыкаясь в магнитопроводе, проходит через воздушный зазор, разделяющий ведущую и ведомую части муфты.
Этот зазор заполнен смесью, содержащей порошкообразный ферромагнитный материал 5
(на рисунке показан точками). При отключенной катушке 4
указанная смесь практически не создает связи между ведущей и ведомой частями муфты.
Когда же в катушке появляется ток и в магнитопроводе возникает магнитный поток Ф, ферромагнитные частицы 5
, заполняющие зазор, намагничиваются и создают жесткую связь между частями муфты. В итоге вращение с ведущей части муфты передается на ведомый вал 9
. Уплотнители 6
необходимы для удержания наполнителя в рабочем объеме.
Отечественная промышленность изготовляет электромагнитные порошковые муфты серии БПМ.
Обладая высоким быстродействием (ферромагнитная смесь практически безынерционная), что является достоинством порошковой муфты, эти муфты имеют недостаток, обусловленный сложностью конструкции: необходимость защиты подшипников от попадания в них порошка и периодической замены ферромагнитного наполнителя из-за постепенного его «старения» и утраты ферромагнитных свойств.
Электромагнитная асинхронная муфта
состоит из индуктора 6
с катушкой возбуждения 3
на ведомом валу 5
и якоря 2
на ведущем валу 1
, рисунок 5.10, а
.
Катушка питается от источника постоянного тока через контактные кольца (изолированные от вала и друг от друга) и щетки 4
. якорь 2
вращается вместе с ведущим валом 1
в магнитном поле индуктора. При этом магнитное поле индуцирует в массивном якоре 2
вихревые токи.
В результате взаимодействия этих токов с полем индуктора на индукторе возникает вращающий момент, направленный в сторону вращения якоря. Под действием этого момента индуктор приходит во вращение, т.е. вращение якоря передается на индуктор. Вращающий момент, переданный таким образом с якоря на индуктор, является асинхронным, т.е. в рассматриваемой муфте имеет место скольжения, а следовательно, частота вращения ведомого вала n2
всегда меньше частоты вращения ведущего вала n1
, так как только при этом условии в якоре индуцируются вихревые токи.
Рисунок 5.10 Электромагнитная асинхронная муфта
Свойства рассмотренной электромагнитной муфты во многом схожи со свойствами асинхронного двигателя и определяются ее механической характеристикой рисунок 5.10, б
. С увеличением статического нагрузочного момента Мс
на ведомом валу частота вращения снижается.
Механическая характеристика муфты мягкая и зависимость частоты вращения от нагрузки в асинхронной муфте более значительна, чем в асинхронном двигателе. Изменяя ток в индукторе Iв
можно менять частоту вращения ведомого вала.
Если момент нагрузки приводного механизма оказывается больше максимального момента муфты, то происходит опрокидывание – вращение ведомой части прекращается. Благодаря способности к опрокидыванию муфта может защищать приводной двигатель от больших перегрузок.
В целях повышения КПД в некоторых конструкциях на якоре асинхронной муфты располагаю короткозамкнутую обмотку 2
, аналогичную обмотке ротора асинхронного двигателя, а сердечники индуктора 1
и якоря делают шихтованными, рисунок 5.11.
Рисунок 5.11 Асинхронная муфта с короткозамкнутой обмоткой
Достоинства
муфты: плавность передачи вращающего момента на ведомый вал; простота конструкции, возможность регулирования частоты вращения ведомого вала, отсутствие изнашиваемых элементов.
Недостатки
муфты: низкий КПД из-за значительных потерь на вихревые токи, низкие габаритно-массовые показатели.
Контрольные вопросы:
1. Чем отличаются электромагниты постоянного и переменного токов?
2. Что такое тяговая характеристика электромагнита?
3. Каково назначение электромагнитных муфт в автоматических системах?
4. Приведите классификацию электромагнитных муфт?
5. Какие существуют типы фрикционных муфт и как они работают?
6. Как устроены и работают ферропорошковые муфты?
7. Каковы назначения и особенности работы муфт скольжения?
Электродвигательные исполнительные механизмы постоянной скорости по характеру действия делят на позиционные и пропорциональные. В качестве исполнительных двигателей таких механизмов используют одно-, двух- и трехфазные короткозамкнутые асинхронные двигатели.
К таким механизмам относятся механизмы типа ДР (поворотные или прямолинейные), ДР-1 (поворотные) и др.
Схема исполнительного механизма ДР, рисунок 6.1 включает однофазный конденсаторный двигатель с редуктором 1
, устройство старт-контактов с блокирующей шиной 2
и скользящего контакта 3
, который приводится в движение рабочим валом.
Исполнительный механизм имеет два фиксированных положения рабочего вала соответственно при левом и правом положениях скользящего контакта. Пусть скользящий контакт 3
расположен на левом старт-контакте. При этом исполнительный механизм работает только при включении управляющего контакта К1
. после начала работы двигателя скользящий контакт переходит на блокирующую шину и двигатель работает, минуя блок управления контактов, до тех пор, пока скользящий контакт не перейдет на правый старт-контакт.
В этом случае цепь двигателя разрывается. Для повторного включения двигателя необходимо включение управляющего контакта К2
. Контакты К1
и К2
включаются с помощью релейного блока управления РБУ
или кнопочных станций оператором.
Рисунок 6.1 – Схема исполнительного механизма типа ДР
Технические данные исполнительных механизмов ДР, ДР-1: мощность двигателя р
= 60
Вт; частота вращения n
= 1500 об/мин; шесть пар сменных шестерен; перестановочный момент Мпс
= 3,2 ÷ 10 Н·м; время одного оборота Тс
= 20 ÷ 240 с; ДР; ДР-1 используют в системах автоматики с двухпозиционными регуляторами.
Такими являются механизмы с резисторными или индуктивными устройствами обратной связи типа ПР, ИМ, КДУ, МЭО, МЭМ, МЭК и др.
В электрических схемах исполнительных механизмов типа ПР-1М используется двухфазный асинхронный двигатель, блок управляющих контактов, конечные выключатели SQ1
, SQ2
и резисторное устройство обратной связи, рисунок 6.
2, а
. При замыкании контакта К1
напряжение на одну из обмоток двигателя подается непосредственно от сети, а на другую – через конденсатор С
(емкость конденсатора обеспечивает сдвиг 900
между фазами тока в обмотках).
Двигатель вращается в одном направлении. При замыкании контакта К2
двигатель реверсируется. Контакты SQ1
и SQ2
включаются последовательно с соответствующими контактами К1
и К2
, обеспечивая разрыв цепи питания двигателя при подходе регулирующего органа к крайним положениям.
Ниже приведены технические данные исполнительных механизмов:
ПР-1М | ИМ | |
Мощность, Гном | 60 | 25 |
Частота вращения, n, об/мин……………………………… | 1500 | 3000 |
Данные редуктора (передаточное отношение i | 6 пар сменных шестерен | |
Перестановочный момент М | 3,2 – 10 | 20 |
Время одного оборота Тс | 20 – 240 | 120 |
Сопротивление резисторного датчика Rос | 185 | 120 |
Напряжение U, В…………………………………………… | 24 | 12 |
Угол поворота вала φ, град………………………………… | 0 – 180 | 5 – 120 |
У исполнительных механизмов типа КДУ (колонки дистанционного управления) используют трехфазный асинхронный короткозамкнутый двигатель с редуктором, реверсивный магнитный пускатель с ключом управления КУ
и дистанционным указателем положения ДУП
. В КДУ-1 используют резисторный, а в КДУ-2 – индуктивный указатели положения.
Принципиальная схема КДУ приведена на рисунке 6.2, б
. Ключом управления КУ
включают цепи трехфазного реверсивного магнитного пускателя, обеспечивая требуемое направление вращения исполнительного двигателя (вперед, назад).
Движок резистивного датчика указателя ДУП
связан с рабочим валом. Резистор указателя ДУП
с сопротивлением R
образует мостовую измерительную схему, в диагональ которой включен миллиамперметр, проградуированный в процентах от максимального угла поворота рабочего вала.
Для ограничения угла поворота в колонке используют концевые выключатели SQ1
– SQ4
. Выключатели SQ1
и SQ3
служат для предупреждающей сигнализации.
При приближении к крайнему положению размыкается SQ1
и зажигается сигнальная лампа. Если ключ управления не выключен, то исполнительный механизм продолжает работать до отключения SQ2
. теперь движение исполнительного механизма возможно при противоположном положении ключа КУ
с использованием в цепи управления выключателей SQ2
и SQ4
. В КДУ предусмотрен штурвал ручного поворота рабочего вала.
а
– типа ПР-1М; б
– типа КДУ
Рисунок 6.2 – Схемы исполнительных механизмов
Электрический исполнительный механизм постоянной скорости типа МЭО однооборотный и предназначен для перемещения регулирующего органа в системах релейного регулирования и дистанционного управления.
Принципиальная электрическая схема исполнительного механизма типа МЭО приводится на рисунке 6.3. На клеммы 1 – 2
выведены концы обмотки возбуждения электродвигателя ОВ
, последовательно с которой включен конденсатор С
.
Преобразователи предельной информации по своему назначению бывают концевыми
и предельных моментов.
Первые выключают электродвигатели при достижении исполнительным устройством заданного положения, вторые – при превышении заданного предельного момента в системе «электродвигатель – редуктор».
Основой этих устройств являются различного рода контактные и бесконтактные переключатели; из них наиболее распространены контактные микропереключатели. Переключатель (В1 – В4
) имеет один размыкающий и один замыкающий контакты с независимыми цепями.
Микропереключатели конструктивно объединены в один узел, унифицированный для различных исполнительных механизмов; таким узлом является блок типа БДИ-6. На передней его стенке находится шкала местного указателя положения со стрелкой и флажки для указания пределов настройки конечных положений.
Дифференциально – трансформаторный датчик состоит из корпуса, внутри которого помещены две одинаковые катушки. Внутри катушек находится сердечник, перемещение которого вызывает перераспределение падений напряжений на катушках датчика. Датчики положения используются для подачи сигналов на дистанционные указатели положения регулирующего органа и в качестве отрицательной обратной связи на вход регулятора.
Рисунок 6.3 – Электрическая схема исполнительного механизма типа МЭО
В механизмах МЭО могут устанавливаться и другие модификации датчиков положения: реостатный БДР или токовый БСПТ. В БДР встроены четыре реостата на 120 Ом с токосъемниками и контактными кольцами, в БСПТ – блоки магнитных датчиков и усилителей.
Рассмотрим блок сигнализации положения реостатный БСПР-12. Блок предназначен для установки в электрические исполнительные механизмы с целью преобразования положения выходного органа механизма в электрический сигнал, сигнализации и блокирования в крайних положениях или промежуточных положениях выходного органа. Для визуального наблюдения положения выходного органа блок может иметь шкалу со стрелкой.
Блок состоит из следующих основных составных частей: блока микропереключателей в составе 4-х микропереключателей и блока датчика, рисунок 6.4.
1- корпус; 2 – микропереключатели; 3 – кулачок; 4 – вал; 5 – гайка; 6 – шарик;
7 – резистор; 8, 9 – шестерни;
Рисунок 6.4 – Блок без шкалы
Блок микропереключателей состоит из корпуса 1
с установленными на нем микропереключателями 2
.
Микропереключатели предназначены для ограничения перемещения и сигнализации положения выходного вала механизма. Микропереключатели расположены компактно и образуют собственно блок концевых выключателей БКВ. Каждый микропереключатель имеет размыкающийся и замыкающийся контакты с раздельными выводами на контакты штепсельного разъема механизма.
Четыре кулачка закреплены на валу 4
с помощью гайки 5
.
При повороте вала кулачка через шарики 6
, упор, пружину нажимают на толкатели микропереключателей и вызывают их срабатывание.
Блок датчика предназначен для преобразования углового перемещения выходного механизма в пропорциональный электрический сигнал.
Блок датчика состоит из закрепленного на корпусе 1
резистора 7
, соединенного с валом 4
посредством зубчатой передачи, состоящей из шестерен 8
и 9
.
При повороте вала 4
на полный рабочий ход валик резистора проходит полный диапазон.
Блок может быть изготовлен в одном из двух исполнений: с указателем положения выходного вала, состоящим из шкалы 10
и стрелки 11
, рисунок 6.5 и 6.6 или без указателя положения рисунок 6.4. Шкала крепится к корпусу блока винтами 12
.
Схема электрическая принципиальная блока приведена на рисунке 6.7.
10 – шкала; 11 – стрелка; 12 – винт
Рисунок 6.5 – Блок со шкалой
Рисунок 6.6 – Блок со шкалой на диапазон регулирования 1800
Рисунок 6.7 – Схема электрическая принципиальная БСПР-12
Рисунок 6.8 – Схема управления исполнительным механизмом типа МЭО
На рисунке 6.8 и приведены схемы соединений регулирующих приборов с пускателями и исполнительными механизмами.
Если регулируемая величина отклоняется от заданного значения за пределы зоны нечувствительности регулирующего прибора, на выходе электронного блока прибора появляется сигнал, в результате чего пускатель срабатывает и включает электродвигатель исполнительного механизма, который начинает перемещать регулирующий орган в сторону восстановления заданного значения регулируемой величины.
В этот момент, когда воздействие устройства обратной связи уравновесит воздействие внешнего сигнала, поступающего от преобразователей, катушки пускателей обесточатся и электродвигатель остановится. Периодические включения электродвигателя будут происходить до тех пор, пока значение регулируемой величины не станет равным заданному.
Чтобы уменьшить угол выбега исполнительного механизма, после отключения электродвигателя от сети параллельно одной из фаз обмотки двигателя через нормально замкнутые блок-контакты магнитного пускателя включается электрический тормоз ЭМ
.
Тормоз имеет электромагнитный привод в виде соленоида, включаемого параллельно с обмоткой управления двигателя. При обесточенном электромагните с помощью рабочей пружины обеспечивается необходимое усилие торможения. При появлении силового напряжения на управляющей обмотке электродвигателя появляется ток и в обмотке соленоида.
Исполнительные механизмы МЭО выпускаются в различных модификациях, отличающихся номинальным крутящим моментом на выходном валу (первая цифра), номинальным временем полного хода выходного вала исполнительного механизма в секундах (вторая цифра), номинальным полным ходом выходного вала в оборотах (третья цифра).
Примеры обозначений исполнительных механизмов МЭО:
МЭО-16/25-0,25 | МЭО-250/25-0,25 |
МЭО-16/63-0,25 | МЭО-250/63-0,25 |
МЭО-40/10-0,25 | МЭО-400/160-0,63 |
МЭО-100/10-0,25 | МЭО-630/25-0,25 |
МЭО-100/25-0,25 | МЭО-630/63-0,25 |
Примеры обозначений выпускаемых исполнительных механизмов типа МЭОБ и МЭОК:
МЭОБ-25/100-1 | МЭОК-25/100-1 |
МЭОБ-25/100-2 | МЭОК-25/100-2 |
МЭОБ-25/100-3 | МЭОК-25/100-3 |
МЭОБ-63/100-1 | МЭОК-63/100-1 |
МЭОБ-63/100-2 | МЭОК-63/100-2 |
МЭОБ-63/100-3 | МЭОК-63/100-3 |
Последняя цифра означает тот или иной вариант использования блока сервомотора.
Электрические исполнительные механизмы переменной скорости используют в системах автоматики непрерывного действия. Скорость управления через управляющее устройство непрерывного действия плавно изменяет скорость перестановки исполнительного органа механизма.
В таких исполнительных механизмах используют двухфазные и трехфазные асинхронные двигатели, частота вращения которых изменяется регулированием подведенного напряжения переменного тока. Широко используются исполнительные механизмы с бесконтактным управлением ИМ-Б, БИМ, МЭК-Б и др., так как они наиболее полно отвечают современным требованиям улучшения качества и надежности работы систем автоматического управления.
Рассмотрим схему бесконтактного управления исполнительным механизмом переменной скорости с двухфазным асинхронным двигателем, рисунок 6.3.1, а
. В управляющую часть схемы входят ФЧУВ
, магнитные усилители МУ1
и МУ2
и цепь обратной связи по частоте вращения исполнительного двухфазного асинхронного двигателя, использующая косвенный метод измерения частоты вращения двигателя, использующая косвенный метод измерения частоты вращения двигателя путем введения положительной обратной связи по току от трансформатора тока ТА
и отрицательной обратной связи по напряжению от трансформатора напряжения ТV
.
Рабочие обмотки усилителей МУ1
и МУ2
включают последовательно с обмотками двухфазного асинхронного двигателя. Сдвиг по фазе в 900
между токами в обмотках двигателя обеспечивается за счет конденсатора С
, включенного параллельно обмоткам двигателя. Вращение двигателя через редуктор воздействует на регулирующий орган РО
.
В зависимости от значения и фазы управляющего сигнала переменного тока U~вх
изменяются токи в выходных цепях ФЧУВ
, а следовательно, и сопротивления рабочих обмоток МУ
. Если при одной фазе управляющего сигнала открывается МУ1
и запирается МУ2
, то при изменении фазы входного сигнала на 1800
запирается МУ1
и открывается МУ2
.
При этом двухфазный асинхронный двигатель реверсируется. Если U~вх
= 0, то МУ1
и МУ2
не подмагничены, сопротивление рабочих обмоток МУ
одинаковы и значительно превосходят сопротивления обмоток двигателя.
Для расширения диапазона пропорциональной зависимости между частотой вращения двигателя и управляющим сигналом используют отрицательную обратную связь по частоте вращения. Коэффициент пропорциональности определяется значением обратной связи в зависимости от положения движка делителя напряжения сопротивления Roc
.
Следует отметить, что в крайних положениях исполнительного органа возможны колебательные процессы из-за нелинейности характеристик МУ
и особенностей их балансировки.
Рисунок 6.9 – Схемы бесконтактного управления исполнительными механизмами
переменной скорости с двухфазным (а
) и трехфазным (б
) двигателями
На рисунке 6.9, б
приведена принципиальная схема бесконтактного управления исполнительного механизма с трехфазным асинхронным двигателем. В управляющую часть схемы входят: ФЧУВ
– для управления магнитными усилителями МУ
1 и МУ
2 в зависимости от входного сигнала переменного тока U~вх
;
МУ
1 и МУ
2 – для усиления сигналов постоянного тока, управляющие блоком из пяти дросселей насыщения БДН
; цепь обратной связи по частоте вращения исполнительного трехфазного асинхронного двигателя, использующей косвенный метод с сигналами от ТА
и TV
.
В отличии от предыдущей схемы здесь выходной ток усилителей МУ
1 и МУ
2 выпрямляется. Он является током управления пятью дросселями насыщения. В зависимости от значения и фазы управляющего сигнала на входе ФЧУВ
устанавливаются частота и направление вращения вала двигателя.
Для расширения диапазона пропорциональной зависимости между частотой вращения двигателя и управляющим сигналом настраивается отрицательная обратная связь по частоте с помощью делителя напряжения сопротивления Roc
. Конечные выключатели SQ
1 и SQ
2, ограничивающие перемещение исполнительного органа механизма, включены в цепи управления соответственно магнитных усилителей МУ
1 и МУ
2.
При увеличении тока Iу1
через управляющую обмотку усилителя МУ
1 подмагничивается группа дросселей (1
, 2
, 5
) и на статорные обмотки двигателя подается напряжение, обеспечивающее вращение двигателя.
При увеличении тока Iу2
через управляющую обмотку усилителя МУ
2 подмагничивается другая группа дросселей (3
, 4
, 5
) и на обмотки двигателя подается напряжение, вызывающее вращение двигателя в обратном направлении.
В исполнительных механизмах переменной скорости с бесконтактным управлением типа МЭК-К используют двухфазный асинхронный двигатель, который получает питание от двухтактных магнитных усилителей с внутренней положительной обратной связью. В схему исполнительного механизма МЭК-25Б, рисунок 6.10 входят: двухтактный дифференциальный магнитный усилитель с выходом на переменном токе МУ
; дистанционное УД
или автоматическое УА
управление через командоаппарат SH
; конечные выключатели SQ
1 и SQ
2 – для ограничения угла поворота выходного вала двигателя; индуктивный датчик указателя ДУП
; электромагнитный тормоз YA
– для торможения двигателем, переключатель П
при дистанционном управлении.
Вращение двигателя через редуктор воздействует на регулирующий орган РО
.
Рисунок 6.10 – Схема исполнительного механизма типа МЭК-25КБ
1. Основные типы электрических исполнительных механизмов.
2. Из каких элементов состоит электрических исполнительный механизм? Их назначение.
3. Особенности управления электрическими исполнительными механизмами постоянной и переменной скорости.
Магнитные усилители
Магнитные усилители применяются для управления электродвигателями самых различных типов, в том числе и электрическими исполнительными устройствами.
Основным элементом МУ является замкнутый сердечник из ферромагнитного материала, рисунок 7.1. На сердечнике имеется две обмотки, одна из которых питается постоянным током и называется управляющей, а вторая – переменным током и называется рабочей.
а
– с О-образным сердечником; б
– с Ш-образным вердечником
Рисунок 7.1 – Упрощенные схемы магнитных усилителей
Намагничивание сердечников осуществляется постоянным и переменным магнитными полями. Сигнал в виде напряжения U1
постоянного тока подается на управляющую обмотку, ток которой создает постоянную составляющую магнитного поля. Синусоидальное изменение переменной составляющей индукции обусловлено синусоидальным напряжением, приложенным к рабочей обмотке.
К недостаткам простейшего МУ относятся следующие:
1) в обмотке управления постоянного тока наводится значительная ЭДС переменного тока;
2) усилитель не обладает чувствительностью к полярности входного постоянного сигнала;
3) усилитель имеет зону нечувствительности, в пределах которой изменение постоянного тока не вызывает заметного изменения силы тока в рабочей обмотке.
Для устранения перечисленных недостатков используются более сложные схемы, рисунок 7.1, б
. В них управляющая обмотка расположена на средней части Ш-образного сердечника. Магнитные потоки Ф1
и Ф2
, создаваемые намагничивающими силами переменного тока в среднем сердечнике, направлены навстречу друг другу и исключают индуктирование ЭДС переменного тока в обмотке управления.
Сечение средней части сердечника равно сумме сечений крайних сердечников. Поэтому при равенстве магнитных потоков Ф1
и Ф2
в обмотке управления, размещенной на среднем сердечнике, не будет наводиться ЭДС переменного тока.
Для того, чтобы МУ стал чувствительным к полярности входного сигнала, необходимо на среднем сердечнике МУ иметь дополнительную обмотку, называемую обмоткой смещения, к которой подводится постоянное напряжение смещения, на рисунке 7.1, б
не показана.
С увеличением подмагничивающего поля изменяется магнитное состояние материала сердечника, т.е. уменьшается его магнитная проницаемость.
Сила тока в рабочей обмотке МУ (в А)
где R
= Rр
Rн
– активное сопротивление обмотки и нагрузки, Ом; xL
= ωL
= 0,8πƒω2 ~
sµ~
/l
– реактивное сопротивление, Ом;
ƒ – частота ЭДС сети, Гц; ω2 ~
– число витков в обмотке; s – сечение магнитопровода, см2
; µ~
– магнитная проницаемость, Гн/м; l
– длина средней силовой линии магнитопровода, м.
Уменьшение µ~
приводит к увеличению xL
и I2
.
Если через обмотку управления пропустить постоянный ток I1
, то в сердечнике будут действовать постоянная и переменная слагающие магнитной индукции. По мере увеличения постоянного напряжения постоянная составляющая магнитной индукции возрастает и магнитная проницаемость в сердечнике меняется.
Коэффициент усиления по мощности МУ (без обратных связей) имеет сравнительно небольшое значение (порядка нескольких десятков):
где Рн
– мощность, выделяемая в нагрузке при подмагничивании, кВт; Ру
– мощность, затрачиваемая в цепи управления, кВт.
Для изменения коэффициента усиления в МУ используются обратные связи – внешние и внутренние.
Рассмотрим нереверсивную схему бесконтактного управления двигателем постоянного тока независимого возбуждения, см. рисунок 7.2. Ток I1
в первичной обмотке трансформатора, подключенной к источнику питания напряжением U1
, регулируется магнитным усилителем МУ
.
При отсутствии управляющего сигнала Uу
на обмотку управления ωу
магнитного усилителя сопротивление рабочих обмоток ωр
этого усилителя Zр
значительно, поэтому ток I1
настолько мал, что напряжение на выходе трансформатора U2
≈ 0.
При подаче управляющего сигнала Uу
происходит насыщение магнитопровода МУ
, сопротивление рабочих обмоток Zр
уменьшается, а ток в первичной обмотке трансформатора увеличивается. При этих условиях напряжение U2
на выходе трансформатора возрастает до требуемого значения.
Переменный ток I2
во вторичной цепи трансформатора посредством выпрямителя B
преобразуется в постоянный ток Iа
, который, проходя по обмотке якоря двигателя М
, вызывает вращение якоря. Обмотка возбуждения ОВ двигателя включена в сеть постоянного тока на напряжение Uа
.
Рисунок 7.2 Схема бесконтактного управления двигателем постоянного тока с применением магнитного усилителя
В зависимости от режима работы магнитного усилителя рассматриваемая система управления двигателем может работать в дискретном режиме («включено – выключено») либо в аналоговом режиме с регулированием частоты вращения двигателя путем изменения управляющего сигнала Uу
.
Схемы управления с применением магнитных усилителей из-за больших габаритных размеров, массы и неудовлетворительных динамических свойств последних заменяются схемами управления на полупроводниковых элементах.
Основными элементами бесконтактных коммутирующих устройств являются управляемые силовые полупроводниковые приборы, в качестве которых обычно применяют тиристоры, реже – транзисторы в ключевых режимах.
На рисунке 7.3 представлена принципиальная электрическая схема однофазного тиристорного контактора переменного тока. Для пуска контактора необходимо включить в сеть катушку КМ. Через контакты этого реле на резисторы R1
, R2
и диоды VD1 и VD2 будут поданы сигналы в цепи управления тиристоров VS1 и VS2.
При положительной полуволне синусоидального напряжения (плюс на клемме 2
) на анод тиристора VS1 будет подан положительный потенциал, а на анод тиристора VS2 – отрицательный потенциал. При этом откроется тиристор VS1 и в нагрузке Zнагр
появится ток положительной полуволны (тиристор VS2 остается закрытым).
Затем последует отрицательная полуволна переменного напряжения (плюс на клемме 1
и минус на клемме 2
), при которой закроется тиристор VS1 и откроется тиристор VS2, через который пройдет ток нагрузки отрицательной полуволны.
Рисунок 7.3 Принципиальная электрическая схема тиристорного контактора
Промышленность выпускает тиристорные контакторы на номинальное напряжение 380 В типа ТКЕО-250/380 на номинальный ток 250 А и типа ТКЕП-100/380 на ток 100 А. Изготовляют также тиристорные пускатели серии ПТ на напряжение 380 В и номинальный ток 16 и 40 А.
На рисунке 7.4 представлена нереверсивная схема управления электродвигателем постоянного тока независимого возбуждения ИМ
. Управление величиной тока в цепи якоря электродвигателя осуществляется тиристором Т
.
Обмотка возбуждения электродвигателя ОВ
включена непосредственно в сеть постоянного тока и напряжение Uв
. Значение тока через тиристор регулируют по принципу фазового управления тиристором. Сущность этого способа управления основана на изменении времени момента отпирания тиристора.
С этой целью в схеме применена фазосдвигающая цепочка r1C
, где r1
– резистор переменного сопротивления. Значение управляющего сигнала Uу
и его фазовый сдвиг относительно напряжения U1
зависят от сопротивления резистора r1
.
При полностью введенном сопротивлении r1
значительная часть напряжения U2
падает на переменном резисторе, так что падение напряжения на конденсаторе Uс
= Uу
оказывается недостаточным для создания напряжения управления, требуемого для отпирания тиристора.
С уменьшением сопротивления r
напряжение Uу
возрастает и достигает значения, достаточного для отпирания тиристора при положительной полуволне напряжения U2
. однако управляющее напряжение Uу
оказывается сдвинутым по фазе относительно напряжения U2
, так что отпирание тиристора происходит в конце положительной полуволны напряжения U2
. поэтому действующее значение тока Iа
в цепи якоря электродвигателя ИМ
невелико и якорь электродвигателя вращается с небольшой частотой.
Рисунок 7.4 – Управление электродвигателем постоянного тока тиристором
При дальнейшем уменьшении сопротивления электродвигателя r1
фаза напряжения на управляющем электроде тиристора Uу
меняется таким образом, что отпирание тиристора происходит в более ранний момент времени, когда положительная полуволна напряжения U2
проходит свой максимум или же еще не достигла этого значения.
Назначение диода в цепи управления тиристора состоит в том, чтобы исключить попадание отрицательного потенциала на управляющий электрод.
Тиристорное коммутирующее устройство: пускатель бесконтактный реверсивный ПБР-2М предназначен для бесконтактного управления электрическим исполнительным механизмом по ГОСТ 7192 с однофазным конденсаторным электродвигателем и имеет две модификации: ПБР-2М и ПБР-2М1. Пускатель ПБР-2М – для механизмов, имеющих электромагнитный тормоз, ПБР-2М1 – для механизмов, имеющих механический тормоз.
Схема пускателя приведена на рисунке 7.5 и состоит из схемы управления бесконтактными ключами, силовой схемы, коммутирующей напряжение питания механизма, источника питания для дистанционного управления пускателем.
В схеме управления резисторы R1, R2 задают входное сопротивление пускателя при малом уровне входного сигнала. Резистор R3 ограничивает бросок входного тока при подаче сигнала управления на вход пускателя. Конденсаторы С1, С2 и диоды V2, V3 сглаживают пульсацию управляющего сигнала.
Стабилитроны V6, V7 предназначены для защиты транзистора V8 от пробоя при перегрузке пускателя по входному сигналу.
Блокинг-генераторы, формирующие импульсы управления триаками, состоят из транзисторов V15, V16, диодов V10 – V13, V18, V19; трансформаторов Т1,Т2; конденсаторов С4, С5; резисторов R8 – R16.
В силовой схеме триаки V21, V22 коммутируют напряжение, от которого осуществляется электрическое питание механизма, а конденсаторы С8, С9 и резисторы R18, R19 улучшают условия коммутации. Дроссели L1, L2 ограничивают величину ударного тока при аварийных перегрузках триаков.
Источник питания цепи дистанционного управления состоит из трансформатора Т4 и выпрямительного моста V1. Вывод источника с отрицательным потенциалом соединен с клеммой 10 (выход «Д»), а с положительным – с клеммой 8 (выход «Ср»).
Входной сигнал управления пускателем – постоянное напряжение (24±6) В – подается на клеммы 8 – 7 или 8 – 9. На клемму 8 (вход «Ср») подается положительный потенциал, на клеммы 7 (вход «М») или 9 (вход «Б») – отрицательный потенциал сигнала управления.
Обозначения «М» (меньше) и «Б» (больше) приняты условно.
В исходном состоянии (входные сигналы отсутствуют) напряжение питания на схеме управления нет, триаки закрыты.
При подаче управляющего сигнала на клеммы 8 – 7 (8 – 9) заряжаются конденсаторыС1 (С2) и С3.
Напряжение с конденсатора С3 через выпрямительный мост V9 подается на вход эмиттерного повторителя, выполненного на транзисторе V8.
Напряжение с выхода эмиттерного повторителя подается на блокинг-генераторы, выполненные на транзисторах V15, V16 и трансформаторах Т1, Т2. Блокинг-генераторы формируют импульсы, отпирающие триаки V21, V22. питающее напряжение с клеммы 1 через открытые триаки V21, V22 подается на вход пускателя клемму 5.
Замыкание клемм 7 – 8 и 8 – 9 производится выходными ключами регулирующих приборов, либо блоком ручного управления.
К задающим элементам относятся устройства ввода задания (задатчики скорости, силы тока и т.д.) и задатчики интенсивности. По виду сигналов задающие элементы делятся на аналоговые и цифровые.
В электрических программных и следящих регуляторах носители программ, как правило, выполняют в виде функциональных потенциометров.
По способу реализации заданной функции потенциометры подразделяют на профильные; ступенчатые (частный случай профильных); с некруглым винтовым каркасом; с переменным шагом намотки; с секциями, выполненными из провода различного сечения; с дополнительными постоянными резисторами, шунтирующие обмотку, имеющую отводы, рисунок 7.7.
а
– профильный; б
– ступенчатый; в
– с некруглым каркасом; г
– с переменным шагом намотки; д
– с секциями, выполненными из провода различного сечения; е
– с шунтирующими резисторами
Рисунок 7.7 Функциональные потенциометры
Для автоматических устройств с малым диапазоном регулирования параметров (например, скорости или частоты вращения) используется один потенциометр, рисунок 7.8, большим – два, рисунок 7.9.
Рисунок 7.8 – Потенциометрический задатчик скорости
Потенциометр R1 служит для грубого задания скорости, R2 – для точного. Для повышения точности задания скорости, задающие элементы питаются стабилизированным напряжением ±Uпит
. Как правило, Uпит
= ±10 В.
Рисунок 7.9 – Потенциометрический задатчик скорости с точным заданием
Вместо потенциометров со скользящим контактом в системах автоматического управления используется бесконтактные задатчики скорости. Основой их являются бесконтактные сельсины и вращающиеся трансформаторы, выходное напряжение которых пропорционально углу поворота вала на требуемый угол.
В качестве цифровых задатчиков используются многопозиционные переключатели. Они представляют собой десятипозиционные (или более)переключатели сегментного типа с барабанным толкателем. На цилиндрической поверхности барабана нанесены номера сегментных ламелей, с которыми поочередно замыкается общий круговой вывод переключателя при переводе барабана из одного механически фиксируемого положения в другое.
В качестве бесконтактного цифрового задатчика используется фотоэлектрический преобразователь перемещения, число импульсов, на выходе которого пропорционально углу поворота вала на требуемый угол.
Задатчики интенсивности служат для получения линейного (в большинстве случаев) закона изменения во времени задающего сигнала, в частности сигнала задания скорости. Функциональная схема аналогового задатчика интенсивности представлена на рисунке 7,10 и состоит из компаратора А1 и интегратора А2, охваченных обратной связью, При ступенчатом изменении входного сигнала u1
, компаратор А1 входит в состояние насыщения с напряжением u2
, а интегратор А2 начинает интегрировать напряжение u2
.
Интегрирование продолжается до момента равенства напряжений u1
и u3
, С этого момента входное напряжение u3
интегратора А2 устанавливается на уровне u1
. Скорость изменения во времени напряжения u3
на выходе задатчика интенсивности.
где U2max
– напряжение насыщения компаратора А1.
Рисунок 7.10 – Функциональная схема задатчика интенсивности
Контрольные вопросы:
1. Преимущества бесконтактных коммутирующих устройств по сравнению с контактными.
2. Проанализируйте работу схемы, представленную на рисунке 7.3.
3. Поясните более подробно работу схемы на рисунке 7.4
4. Проанализируйте работу схемы, представленную на рисунке 7.5.
5. Расскажите классификацию задающих устройств.
8 ЭВМ и микропроцессоры в САУ
В современных САУ для реализации сложных алгоритмов управления применяют как аналоговые, так и цифровые ЭВМ. Аналоговые вычислительные устройства используют, например, для сложения и вычитания воздействий в контурах управления, вычитания производных и интегралов, построения перестраиваемых моделей ОУ в адаптивных системах, т.е. там, где реализуются основные достоинства аналоговой техники: большое быстродействие, возможность работы в реальном масштабе времени и непосредственного сопряжения с измерительными и исполнительными устройствами, относительная простота, высокая экономическая эффективность.
При использовании цифровой вычислительной техники в САУ необходимо преобразовывать аналоговые сигналы в цифровые при вводе их в цифровую вычислительную машину (ЦВМ) и цифровые сигналы в аналоговые при их выводе. Для этого используют соответственно аналого-цифровые (АЦП) и цифровые (ЦАП) преобразователи, рисунок 8.1.
ИУ – исполнительное устройство; ОУ – объект управления; U
– управляющее воздействие; F
– возмущающее воздействие
Рисунок 8.1 Упрощенная структурная схема цифровой САУ
В САУ используют как специализированные цифровые вычислительные устройства, так и серийные ЦВМ. Специализированные вычислительные устройства управления, иначе называют цифровыми регуляторами
, разрабатываются специально для конкретных САУ, т.е. использование их рационально в тех случаях, когда программы управления постоянны и перепрограммирование не требуется.
В настоящее время для этих целей все шире применяют встроенные микропроцессоры, сочетающие в себе большие алгоритмические возможности с высокой экономической эффективностью (например, при построении систем числового программного управления станками и промышленными роботами-манипуляторами).
Для многоточечного управления сложными ОУ используют серийно выпускаемые управляющие микро- и мини-ЭВМ (УВМ).
Основными особенностями малых ЭВМ, предназначенных для применения в САУ, являются:
упрощенная система команд;
ограниченный объем оперативной памяти (примерно 64 Кбайт);
сокращенная длина машинных слов (обычно 2 байта);
упрощенный интерфейс;
наличие дополнительных устройств для автоматического схемного контроля работы всех блоков и резервирование особо важных блоков в целях повышения надежности работы ЭВМ.
В настоящее время в САУ вместо отдельных ЭВМ используют управляющие вычислительные комплексы (УВК), представляющие собой унифицированную систему технических и программных средств эксплуатационного обеспечения и стандартов. УВК используются в автоматизированных системах управления технологическими процессами (АСУТП), при автоматизации научных и технических эксперементов, в испытательных и измерительных САУ.
Набор технических средств УВК включает в себя процессорные устройства различной производительности, устройства ввода-вывода, устройства связи с объектом (УСО), устройства передачи данных (УПД), мультисистемные средства и другие устройства, позволяющие компоновать самые разнообразные САУ.
Области применения САУ все время расширяются, и сложность ОУ непрерывно возрастает, например Единая автоматизированная система связи (ЕАСС), автоматизированные системы управления предприятиями и целыми отраслями промышленности и т.д. Во всех перечисленных САУ необходимо оперативно обрабатывать столь большие объемы информации, что в качестве центрального вычислительного устройства в них используются универсальные высокопроизводительные ЭВМ.
В последние годы появились задачи управления, для реализации которых недостаточно возможностей ни аналоговых (малы точность и алгоритмические возможности), ни цифровые (малы точность и алгоритмические возможности), ни цифровых (мало быстродействие) ЭВМ. К таким задачам относятся:
управление движущимися объектами, когда траектория формируется в процессе движения;
моделирование и идентификация сложных объектов (включая биологические) в реальном масштабе времени;
создание комплексных тренажеров;
Для решения подобных задач используют гибридные (аналого-цифровые) вычислительные системы, сочетающие в себе достоинства аналоговых и цифровых ЭВМ.
автоматики
Бесконтактные логические элементы используются при реализации различных логических законов управления и для осуществления блокировок и защит в системах управления.
Логический элемент выполняет те же функциональные операции, что и электромагнитное контактное реле. Он имеет два устойчивых состояния – «включено» и «выключено», которые обозначаются соответственно цифрами 1 и 0.
Для электромагнитного реле цифра 1 обозначает, что его контакт замкнут, а цифра 0 – разомкнут. Для бесконтактного логического элемента цифра 1 указывает на наличие напряжения на его выходе, цифра 0 – на отсутствие. Аналогично обозначаются и входные сигналы элементов.
Рисунок 8.2 Реализация простейших логических функций
Логический элемент НЕ
, рисунок 8.2, а
, выполняет операцию отрицания (инвертирования). При наличии входного сигнала, т.е. при X
= 1, выходной сигнал отсутствует (Y
= 0), а при отсутствии входного сигнала (X
= 0) выходной сигнал Y
= 1.
Логический элемент ИЛИ
. Сигнал на выходе этого элемента появляется при наличии хотя бы одного входного сигнала X1
или X2
, рисунок 8.2, б
. Операция ИЛИ может выполняться для любого числа входных сигналов.
Логический элемент И
. Сигнал на выходе этого элемента Y
= 1, рисунок 8.2, в
, появляется только в том случае, когда оба входных сигнала 1. В остальных случаях Y
= 0.
Логический элемент ИЛИ – НЕ
, рисунок 8.2, г
. В этом случае более сложном элементе при наличии хотя бы одного сигнала на входе (X1
, X2
= 1) сигнал на выходе Y
= 0, а при отсутствии входных сигналов (X1
, X2
= 0) выходной сигнал Y
= 1.
Кроме рассмотренных примеров логические элементы могут выполнять запоминание уровня входного сигнала (операция ПАМЯТЬ), блокировку (операция ЗАПРЕТ), выдержку времени на включение и отключение электрических аппаратов, и другие операции.
В большинстве схем управления на логических элементах используется типовой узел «Память». Этот узел образуется соединением двух элементов ИЛИ – НЕ, рисунок 8.3, а
и работает следующим образом. Допусти, что требуется запомнить информацию, характеризующуюся верхним уровнем дискретного сигнала Uвх1
= 1, и иметь возможность «стереть» из памяти эту информацию.
Запоминаемый сигнал Uвх1
= 1 подается на вход 1
первого элемента ИЛИ – НЕ. Так как элементы этого узла осуществляют функцию НЕ, то сигнала на выходе первого элемента не будет, а на выходе второго появится напряжение Uвых
.
Этот сигнал по цепи обратной связи поступит на вход 2
первого элемента. Теперь сигнал включения Uвх1
= 1 можно снять с входа 1
, а сигнал на выходе узла Uвых
будет существовать сколь угодно долго.
Для стирания из памяти записанной информации надо подать сигнал Uвх1
= 1 на вход 4
второго элемента схемы, который снимет сигнал Uвых
. С его выхода, а память будет «очищена».
Рисунок 8.3 Реализация схем управления на логических элементах
Рассмотрим типовой узел реверсивной схемы, рисунок 8.3, б
, управления двигателем реализованный на логических элементах. В нем использованы два узла «Память» (элементы П1
…П4
, ИЛИ – НЕ) и два согласующих усилителя А1
и А2
, от которых питается катушки контакторов КМ1
и КМ2
, обеспечивающие включение двигателя в условных направлениях «Вперед» и «Назад».
Включение двигателя осуществляется кнопками «Вперед» SB1
и «Назад» SB2
, воздействие на которые запоминается соответствующими узлами памяти. При этом кнопки SB1
и SB2
взаимно заблокированы, а нажатие кнопки SB3
«Стоп» приводит к отключению любого из включенных в данный момент контакторов КМ1
и КМ2
.
Система управления двумя двигателя, рисунок 8.3, в
, на логических элементах выполняет следующие функции: включение двигателей М1
(контактор КМ1
) и М2
(контактор КМ2
) с помощью кнопок SB1
и SB2
; отключение двигателей М1
при срабатывании конечного выключателя SQ1
и М2
при срабатывании выключателя SQ2
; отключение двигателей кнопкой SB3
«Стоп»; блокировку, запрещающую одновременную работу двух двигателей М1
и М2
.
Схема рисунок 8.3, в
, во многом повторяет схему рисунок 8.3, б
. Для размножения сигналов запрета в ней применяются диодные элементы ИЛИ, входящие в состав серии логических элементов.
На рисунке 8.3, г
, приведен типовой узел, с помощью которого может быть реализовано управление по принципу времени. В этой схеме узел «Память» представлен одним элементом, а логический элемент задержки времени обозначен ЭВ
.
Узел работает следующим образом. При нажатии кнопки SB1
«Пуск» через усилитель А
подается питание на катушку контактора КМ
, который включает двигатель. Одновременно с этим сигнал поступает на вход элемента задержки ЭВ
, которой, отсчитав свою выдержку времени, включает реле КТ
.
Увеличение уровня интеграции ИС и улучшения их технико-экономических характеристик позволили использовать вычислительные устройства во многих областях: от устройств промышленного оборудования и контрольно-испытательной аппаратуры до ЭВМ. Процесс применения ИС для построения различной вычислительной техники значительно ускорился с применением микропроцессоров.
Название «микропроцессор» связано с исполнением процессора на одной или нескольких кристаллах полупроводниковой ИС. Микропроцессоры служат главными функциональными частями микро-ЭВМ, которые реализуются на БИС. Подготовительным этапом развития микропроцессоров стали микрокалькуляторы.
Микропроцессор
– самостоятельное или входящее в состав ЭВМ устройство, осуществляющее обработку информации и управляющее этим процессом, выполненное в виде одной или нескольких БИС. В общем случае в состав микропроцессора входят, рисунок 8.4: арифметико-логическое устройство (АЛУ
), устройство управления УУ и регистровое запоминающее устройство РЗУ
.
Рисунок 8.4 Структурная схема микропроцессора
Арифметически-логическое устройство
предназначено для выполнения арифметических и логических операций над данными, представленными в виде двоичных чисел. Данные, с которыми производятся эти операции, называются операндами. Обычно в операции участвуют два операнда, один из которых находится в специальном регистре – аккумуляторе А
, а другой – в регистрах РЗУ
(или памяти МП). Иногда АЛУ
называют операционной частью МП.
Регистровое запоминающее устройство
содержит несколько регистров общего назначения (РОН
), а также регистры специального назначения, в частности счетчик команд СК
. Иногда РЗУ
называют внутренней памятью МП.
Управляющее устройство
предназначено для выработки сигналов управления, обеспечивающих работу блоков в МП. В состав УУ
входит регистр команд РК
, в котором фиксируется выполняемая в данный момент команда.
Работа МП обеспечивается программой, записанной в его памяти.
Последовательность команд, обеспечивающих реализацию заданного алгоритма обработки информации, образует программу. Важной особенностью работы МП является то, команды программы в нем выполняются в пошаговом режиме строго в записанной последовательности.
Каждая команда программы содержит информацию о том, что нужно делать, с какими операндами и по какому адресу поместить результат операции. Для этого команда имеет структуру, приведенную на рисунке 8.4, б
. Первая часть ее содержит код операции КОП, т.е. информацию о характере операции над операндами (например, сложение, логическое сравнение и др.).
Команды, адреса и операнды МП выражаются двоичными многоразрядными числами, представляемыми, как и во всех цифровых устройствах, комбинацией двух уровней напряжения – высокого и низкого. Первые МП оперировали четырехразрядными числами, а в современных МП используются восьми- и шестнадцатиразрядные числа. Использование в МП многоразрядных двоичных чисел позволяет повысить их быстродействие и точность работы.
Программа (совокупность команд) МП может быть записана несколькими способами. Первый из них предусматривает запись команд непосредственно в виде двоичных чисел, т.е. в виде так называемого машинного кода, понятного для данного МП. Такой способ составления программ в большинстве случаев оказывается малоудобным и требует больших затрат времени, особенно при создании больших программ.
Более удобным является использование языков программирование. Языки низкого уровня типа АССЕМБЛЕР, как средство общения с МП включают в себя несколько десятков типовых команд, представленных в условных мнемокодах. Например, язык этого типа для отечественного восьмиразрядного МП типа К580 включает в себя около 80 типовых команд – арифметических, логических, пересылки данных, передачи управления и ряд других.
Большие возможности и удобства пользователю микропроцессорными схемами управления представляют языки программирования высокого уровня: ФОРТРАН, ПАСКАЛЬ, ПЛ/М, БЕЙСИК, СИ, АДА и их разновидности (диалекты). Составленные на этих языках программы далее транслируются (переводятся) с помощью специальных программ, получивших название кросс-программ, в систему машинных кодов, понятных для МП.
Представленный на рисунке 8.4, а
МП не может быть непосредственно использован для управления объектом автоматизации. Для выполнения функций управления схема МП должна быть дополнена целым рядом блоков, к числу которых относятся устройства памяти, устройства согласования с другими блоками объекта управления, устройства ввода-вывода, генератор тактовых импульсов и ряд других.
Совокупность МП и перечисленных выше устройств образует микропроцессорную систему (МПС), структурная схема, которой приведена на рисунке 8.5.
Состав МПС наряду с МП входят устройства памяти оперативной ОЗУ
и постоянной ПЗУ
, интерфейсное устройство ИУ
, устройства сопряжения УС
с внешними объектами; внешние запоминающее устройства ВЗУ
, устройства ввода-вывода информации УВВ
, общая шина ОШ
, включающая в себя ШД
, ШУ
, и ША
.
Рисунок 8.5 Микропроцессорная система
Устройства памяти ОЗУ
и ПЗУ
служат для размещения подлежащих обработке данных и программы, в соответствии с которой эта обработка должна вестись, а также результатов обработки. Для расширения возможностей МПС, кроме ОЗУ
и ПЗУ
, могут использоваться ВЗУ
, к числу которых относятся накопители информации на гибких магнитных дисках и др.
Устройства ввода-вывода информации (УВВ)
предназначены для обеспечения взаимодействия МПС и человека в удобной для него форме. К устройствам ввода-вывода относятся клавиатура пульта управления, принтер, графопостроители, устройства визуального представления информации (мониторы) и др.
Устройства сопряжения (УС)
обеспечивают связь МПС с различными внешними (периферийными) устройствами. Они могут иметь самые разнообразные схемные и элементные реализации. В частности, для связи МПС с датчиками координат ЭП (Д
) и блоками схемы управления ЭП (СУЭП
) широко используются аналого-цифровые (АЦП) и цифроаналоговые (ЦАП) преобразователи электрических сигналов, обозначенных на схеме УС1
и УС2
.
Устройства сопряжения УС3
и УС4
, предназначенные для связи МПС с ВЗУ и УВВ, представляют собой в простейшем случае буферные (промежуточные) регистры памяти для хранения данных, передаваемых с общей шины ОШ
на внешние устройства или обратно.
Устройства сопряжения УС5
, выполняющие согласование работы МПС с другими МПС и ЭВМ, называются адаптерами.
Интерфейсное устройство (ИУ)
– это совокупность электронных схем, шин и алгоритмов (программ), обеспечивающая управление передачей информации между МП, памятью и внешними устройствами (УВВ, ВЗУ, Д
). Другими словами, интерфейсное устройство обеспечивает требуемое взаимодействие МПС с указанными внешними устройствами при изменении режима ее работы.
Типичным примером является переход от выполнения одной программы к выполнению другой при поступлении от какого-либо внешнего устройства сигнала управления. Такой переход получил название прерывания. После завершения прерывающей программы ИУ обеспечивает возврат МПС к работе по прерванной программе. Примерами ИУ являются таймер, блок прямого доступа к памяти, блок организации прерываний.
Отметим, что совокупность МП, памяти и интерфейса, который включает в себя ИУ, УС, и ОШ, получили название микро-ЭВМ.
По назначению МПС и микро-ЭВМ подразделяются на универсальные и специализированные.
К универсальным относятся МПС и микро-ЭВМ, способные как обеспечивать управление различными объектами (в том числе и ЭП), технологическими процессами, промышленными предприятиями, так и выполнять различные вычислительные операции. Для выполнения этих функций МПС имеет широкий набор внешних (периферийных) устройств, показанных на рисунке 8.5.
Специализированными называются МПС, которые уже на стадии своего создания ориентированы на конкретное применение – схемы управления станка или робота, измерительные системы и др. В этом случае МПС содержат только те устройства и имеют такое программное обеспечение, которое обеспечивают выполнение конкретных, заранее определенных функций.
Широко распространенным примером специализированной МПС является программируемый контроллер (ПК).
Для лучшего понимания выполняемых ПК функций и особенностей его структуры обратимся к схеме, рисунок 8.6, реализующим различные логические операции при управлении: запрещение включения одного контактора при включенном другом, разрешение включения двигателя при нажатии кнопки управления и отсутствии запрещающего сигнала защиты и др.
Подобные схемы получили название жесткой (или монтажной) логики, так как осуществление заданных логических операций обеспечивается определенным набором элементов и связями между ними. При реализации сложных систем управления (20…30 элементов и более) схемы с жесткой логикой приобретают большие массу и габаритные размеры, возрастает их энергопотребление, усложняются наладка и диагностика их работы и соответственно ремонт.
Альтернативным (технически и экономически более целесообразным) решением при создании сложных схем управления является применение программируемых контроллеров как разновидности МПС. Применение ПК позволяет избежать всех тех недостатков, которые характерны для схем с жесткой логикой, и в первую очередь отсутствия гибкости при реализации сложных законов управления.
Программируемый контроллер – это специализированная МПС, предназначенная для обработки логических входных сигналов, их преобразование и выработки управляющих воздействий и работающая по заранее заданной программе. Процесс обработки поступающей информации и выработки управляющих воздействий осуществляется в ПК по программе и происходит в реальном масштабе времени.
Рисунок 8.6 Структурная схема программируемого контроллера
В состав ПК, рисунок 8.6 входят запоминающее устройство ЗУ
, в котором содержится программа его работы; логический процессор ЛП
(АЛУ
на схеме рисунок 8.4), осуществляющий логические операции над последовательно вводимыми в него сигналами; коммутаторы входных К1
и выходных К2
сигналов; устройства сопряжения ПК
с входными УС1
и выходными УС2
сигналами, а также память П
, в которую поступают результаты выполнения логических операций.
Входные сигналы uвх1
, uвх2,
… uвх3
, содержащие информацию о ходе технологического процесса, режимах работы отдельных частей системы управления, состоянии защиты, поступают на вход устройства сопряжения УС1
, которое обеспечивает их гальваническую развязку и формирование их них сигналов, соответствующих по значению и виду, используемым в данном ПК.
Сформированные таким образом сигналы поступают на вход коммутатора К1
, который последовательно подает на ЛП
тот из них, адрес которого содержится в очередной команде, поступающей из ЗУ
.
После выполненных ЛП
преобразований, которые также определяются заложенной в ЗУ
программой, сигналы через коммутатор К2
поступают в регистр памяти П
и далее через УС2
на выход ПК
.
Заметим, что последовательный принцип выполнения операций увеличивает время обработки информации, но так как время выполнения одной отдельной операции составляет всего лишь несколько микросекунд, быстродействие ПК в большинстве случаев оказывается вполне достаточным.
В качестве входных допускаются сигналы напряжением от 5 до 250 В постоянного или переменного тока, общее число которых может достигать тысячи и более. Выходные устройства сопряжения УС2
обычно строятся на основе оптронных тиристоров, обеспечивающих гальваническую развязку выходных цепей и позволяющих управлять достаточно мощными исполнительными устройствами – реле, контакторами, катушками электромагнитов и др.
В теории цифровых систем управления показывается, что любые логические преобразования могут быть выполнены с помощью простейших логических операций И, ИЛИ, НЕ. Это положение определяет простоту программного обеспечения работы ПК, доступного, в том числе персоналу, не имеющему специальных знаний в области программирования МПС.
Контрольные вопросы:
1. Что называется логическим элементом и какие основные логические элементы применяются в САУ?
2. Назначение аналого-цифрового преобразователя.
3. Назначение цифро-аналогового преобразователя.
4. Что называется микропроцессором?
5. Какие функциональные блоки включают в себя микропроцессорная система?
6. Дайте определение микропроцессорной системы.
7. Что представляет собой программируемый логический контроллер?
Для отображения информации в системах автоматического управления широко используются индикаторные устройства. Чаще всего информация отображается с помощью оптических индикаторов, поскольку именно с помощью зрения человек воспринимает основной объем информации, используемой в производственной деятельности.
Кроме оптических индикаторов используются звуковые (акустические) индикаторы. Например, для сигнализации аварийных ситуаций наиболее приемлемы именно звуковые сигналы (звонок громкого боя, сирена, гудок, ревун) в сочетании с привлекающими внимание персонала световыми (т.е. оптическими) сигналами.
Оптические индикаторные устройства.
Различают активные и пассивные оптические индикаторы. К активным индикаторам относятся лампы накаливания, газоразрядные приборы и другие устройства, излучающие свет в видимой части спектра. К пассивным индикаторам относятся те устройства, которые сами не излучают свет, а лишь отражают свет внешних источников.
Светодиод в настоящее время является одним из наиболее простых и распространенных активных индикаторов. Принцип действия его основан на том, что при протекании прямого тока через полупроводниковый диод происходит излучение фотона (т.е. световой энергии).
В кремниевых и германиевых диодах это излучение происходит в невидимом глазом диапазоне длин волн. А если выполнить диод на основе арсенида-фосфида галлия (GaPAs), то излучение происходит в диапазоне волн от 0,58 до 0, 65 микрон. Это излучение человек воспринимает как желтый (0,58 мкм)
, оранжевый (0,63 мкм) или красный (0,65 мкм) свет. Светодиод, изготовленный на основе фосфида галлия (GaP), излучает зеленый (0,56 мкм) свет, а изготовленный на основе арсенида галлия (GaAs), – инфокрасный (0,90 мкм), хотя и невидимый человеческим глазом, свет, но удобный для дистанционного управления объектами.
В зависимости от количества и пропорции примесей можно изменять длину волны максимума излучения, т.е. цвет свечения фотодиода. Материалы, используемые для изготовления светодиодов, дороже кремния и германия, поэтому светодиоды дороже обычных диодов.
Коэффициент полезного действия светодиодов очень мал, только у инфокрасных диодов он составляет примерно 5%, а у других в сто раз меньше. Быстродействие светодиодов очень высокое: при подаче скачкообразного входного сигнала яркость диода изменяется за сотую долю миллисекунды.
Входным сигналом для светодиода является прямой ток. От его величины зависит и яркость свечения. Хорошая видимость даже при дневном свете обеспечивается при прямом токе от 5 до 20 мА. При этом напряжение на светодиодах составляет 2 – 3 В. Светодиоды по своим параметрам хорошо согласуются с транзисторными и интегральными схемами. На рисунке 9.
1 показаны схемы включения светодиодов VD
с помощью транзисторного ключа (а
– высоким уровнем напряжения, б
– низким уровнем). Поскольку транзистор VТ
обладает усилительными свойствами, ток, потребляемый от источника сигнала, в десятки раз меньше прямого тока светодиода.
Рисунок 9.1 – Схемы включения светодиодов
Сопротивление резистора Rогр
ограничивает прямой ток светодиода и его величина равна: Rогр = (Е – UVD)/IVD
.
Светодиоды выпускаются в различном исполнении: точечном, линейном, цифрознаковом. Наибольшее распространение получили семисегментные цифровые светодиодные индикаторы. Стилизованное изображение цифры составляется из семи светодиодных сегментов, расположенных в виде цифры 8.
При подаче сигналов на определенные сегменты высвечивается требуемая цифра. Например, для высвечивания цифры 5 необходимо подать сигналы на сегменты a, f ,q, c, d
, рисунок 9.2.
Рисунок 9.2 – Семисегментный индикатор
Линейный светодиодный индикатор представляет собой интегральную схему в виде светящегося столбика, образованного последовательно включенными светодиодными сегментами, и блока управления. Внешне такой индикатор выглядит как линейная шкала, он служит для отображения непрерывно меняющейся информации и является аналогом стрелочного измерительного прибора.
Люминесцентные индикаторы также относятся к типу активных. Они представляют собой электронную вакуумную лампу с катодом, управляющей сеткой и несколькими анодами. Аноды покрыты слоем люминофора, который светится, если на него попадает поток электронов, испускаемых катодом.
Устройство люминесцентного индикатора показано на рисунке 9.3. В стеклянном баллоне 5
расположены катод 1
, сетка 3
и аноды 2
на подложке 4
. Катод выполнен в виде двух тонких вольфрамовых нитей, натянутых параллельно анодам.
Между катодом и анодами находится плоская сетка. На катод подается напряжение накала, он нагревается и испускает поток электронов. На сетку и аноды подаются положительные (по отношению к катоду) напряжения. Поток электронов из катода устремляется к положительно заряженной сетке, пролетает ее по инерции и попадает в ускоряющее поле тех анодов, на которые подано напряжение.
Серийно выпускаемые промышленностью люминесцентные индикаторы работают при напряжении накала до 5 В и сеточном напряжении 20 – 30 В.
Рисунок 9.3 – Люминесцентный индикатор
К пассивным относятся жидкокристаллические индикаторы. Считывание с них информации возможно лишь при наличии внешнего освещения – естественного или искусственного. Принцип действия таких индикаторов основан на изменении степени прозрачности органических жидкокристаллических веществ, находящихся в электрическом поле.
Конструктивно жидкокристаллический индикатор, рисунок 9.4 выполнен в виде двух плоских стеклянных пластин 1
, разделенных по периметру прокладкой 2
. На внутреннюю поверхность одной пластины наносятся прозрачные проводящие электроды-сегменты 3, форма и взаимное расположение которых будут определять индицируемые знаки.
На всю вторую пластину 1
наносится проводящий прозрачный электрод 4
. Пространство между пластинами заполняется жидкокристаллическим веществом, толщина слоя которого составляет примерно 10 микрон. Собранный таким образом пакет из стеклянных пластин, электродов и жидкого кристалла герметизируют.
Рисунок 9.4 – Жидкокристаллический индикатор
Величина тока жидкокристаллического индикатора очень мала, поскольку вещество жидкого кристалла обладает большим удельным сопротивлением – несколько МОм на см. Поэтому и потребление энергии таким индикаторам существенно меньше, чем у индикаторов других типов, хотя не следует забывать, что для жидкокристаллического индикатора требуется внешний источник света и не всегда бывает достаточно естественной освещенности.
В этом случае требуется дополнительная энергия для питания источника света. При хорошей внешней освещенности контрастность знаков по отношению к фону составляет 70 – 90%. Жидкокристаллические индикаторы относятся к высоконадежным элементам автоматики (наработка на отказ составляет несколько десятков тысяч часов), однако необходимо не допускать их нагрев выше 60 о
С, а также исключить постоянную составляющую в перемененном напряжении.
Оптимальным с точки зрения сочетания качества изображения и стоимости является индикаторный экран на базе электронно-лучевой трубки. С их помощью технологический персонал оперативно, практически мгновенно, получает интерисующую его информацию о состоянии объекта управления и (или) системы управления, причем в самом льготном режиме – диалоговом, т.е. в режиме «вопрос – ответ».
В мониторе персонального компьютера используются именно электронно-лучевая трубка (в ноутбуке с целью экономии энергии применяется жидкокристаллический экран). В электронно-лучевой трубке с помощью двух отклоняющих катушек можно изменять пространственное положение электронного луча на экране и выполнить изображение, состоящее более чем из миллиона точек.
Но устройства управления электронно-лучевой трубки с трудом согласуются с наиболее перспективными цифровыми системами формирования изображения. В настоящее время более удачным средством для индикации большого объема информации являются плоские информационные экраны или панели.
Работа их основана на различных физических принципах, но все они выполняют две задачи: обеспечивают пространственное распределение электрических сигналов для включения любого элемента индикации на всей поверхности экрана-панели и осуществляют преобразование электрического сигнала в оптическое излучение.
Для этого светоизлучающие элементы экрана располагаются в строго фиксированных точках. При этом возможны два способа адресации: параллельный (все элементы индикации независимы и могут включаться в любом порядке) и последовательный (в каждый, очень короткий момент времени включен лишь один элемент и вся информация создается путем поочередного включения всех необходимых элементов).
При параллельной адресации каждый элемент (точка на экране) должен быть соединен с источником сигнала проводником. Это технически трудно осуществимо. Например, для квадратного экрана с 10000 элементов (сто точек в каждой из ста строчек) потребуется 10000 проводников и столько же ключей для управления экраном.
При последовательной адресации число соединительных проводников и ключей (элементов управления) может быть резко уменьшено за счет применения матричного построения экрана. Такой экран выполняется с матричной (решетчатой) структурой, как показана на рисунке 9.5.
Рисунок 9.5 – Информационный матричный экран
На нижнюю стеклянную пластину 1
наносятся параллельные электроды 2
, на верхнюю стеклянную пластину 3
– параллельные вертикальные электроды 4
. между электродами 2
и 4
помещается слой активного оптического материала 5
, изменяющего свои оптические свойства при прохождении тока или под воздействием электрического поля.
При одновременной подаче напряжения на один из горизонтальных электродов 2
и один из вертикальных электродов 4
происходит включение элемента индикации, находящегося на их пересечении. При этом для экрана с 10000 элементов при последовательной матричной адресации потребуется всего 200 соединительных проводников и ключевых элементов управления, т.е.
в 50 раз меньше, чем при параллельной адресации. Но при последовательной адресации необходимы весьма быстродействующие электрооптические преобразователи. Для нормального восприятия человеком – оператором картинка на экране должна повторяться 50 раз в секунду.
Следовательно, каждый элемент экрана будет включаться на время 1/950 · 10000) = 2 мкс. Используемые в настоящее время оптические материалы, реагирующие на электрические сигналы (жидкие кристаллы, газоразрядная плазма, многие электролюминофоры), слишком инерционны и не успевают выдать световой сигнал.
Большая часть информации, по которой принимаются управленческие решения, может быть не только получена на экране дисплея (монитора), но и зафиксирована на машинограмме
с помощью АЦПУ (принтера). Например, по команде оперативного персонала могут быть отпечатаны мгновенные текущие значения режимных параметров, их позиции на технологической схеме, регламентные значения и отклонения текущих значений от регламентных; составы материальных потоков (в этом случае фиксируется позиция пробоотборного устройства, время отбора и результаты анализа) и другая информация.
Для отображения положения регулирующего органа используются дистанционные указатели ДУП. Данный указатель, рисунок 9.6 состоит из измерительного моста и узла питания (на рисунке не показан). Для подключения к датчику положения регулирующего органа используются клеммы 3 – 4 – 5
указателя.
Плечи неуравновешенного измерительного моста образуются потенциометром R3
, обмотками ДП
или активным сопротивлением в случае реостатного преобразователя, а также резисторами R4
и R6
.
В диагональ моста включен измерительный прибор ИП
(микроамперметр 0 – 100 мкА); чувствительность его выбирается потенциометром R5
. выпрямление тока производится полупроводниковыми диодами Д3
и Д4
. мост балансируется потенциометром R3
. резисторы R2
, R4
, и R6
служат для ограничения тока в цепях питания моста и питания преобразователя.
Рисунок 9.6 – Принципиальная схема дистанционного указателя положения ДУП
R1
обеспечивает режим работы стабилитронов. При изменении положения выходного вала исполнительного механизма меняется соотношение сопротивлений плеч ДП
; это приводит к изменению тока в диагонали моста, измеряемого прибором ИП
, шкала которого отградуирована в процентах.
Контрольные вопросы
1. Перечислите типы индикаторных устройств.
2. Как устроен жидкокристаллический индикатор?
3. Каким образом формируется на экране монитора изображение?
Важнейшим свойством систем автоматического управления является надежность. Надежностью
называется свойство устройства выполнять необходимые функции, сохраняя в течение заданного промежутка времени эксплуатационных показателей в требуемых пределах.
Отказ может наступить не только при механических или электрических повреждениях (обрывы, короткие замыкания), но и при нарушении регулировки, из-за «ухода» параметров элементов за допустимые пределы и т.п. Отказы отдельных элементов, а также изменения параметров элементов могут привести к нарушению устойчивости САУ и ухудшению показателей качества переходного процесса (времени установления переходного процесса установившегося значения регулируемого параметра, перерегулирования, установившейся ошибки), что также является отказом системы.
Различают внезапные и постепенные отказы. Внезапныеотказы
возникают в результате скачкообразного изменения эксплуатационных параметров элемента или устройства. Они являются результатом скрытных недостатков технологии производства или скрытых изменений параметров, накапливающихся в процессе эксплуатации при ударах, вибрациях и т.д.
Примеры внезапных отказов – обрыв провода, короткое замыкание, пробой полупроводникового прибора. Постепенные отказы
характеризуются, плавными изменениями во времени параметров элементов или устройств, вызванными необратимыми процессами старения, износа, а также нарушением условий регулировки.
Надежность проявляется через безотказность, долговечность, ремонтопригодность и сохраняемость.
Безотказность
– свойство системы (элемента) непрерывно сохранять работоспособность в течение некоторого времени.
Долговечность
– свойство системы (элемента) сохранять работоспособность до наступления предельного состояния с перерывами для технического обслуживания и ремонтов. Предельное состояние может устанавливаться по изменениям параметров, условиям безопасности, экономическими показателями, необходимости капитального ремонта и т.д.
Ремонтопригодность
– свойство системы (элемента), заключающееся в приспособлении ее к предупреждению, обнаружению и устранению отказов путем проведения технического обслуживания и ремонта.
Сохраняемость
– свойство системы (элемента) непрерывно сохранять исправное, работоспособное состояние в течение всего времени хранения.
Надежность системы управления зависит от условий эксплуатации, схемного и конструктивного исполнения, количества и качества формирующих ее элементов. Надежность элементов зависит от качества материалов, технологии изготовления и т.п.
Поскольку отказы являются случайными событиями, то для исследования надежности применяют теорию вероятностей и математическую статистику.
Количественные характеристики надежности – вероятность безотказной работы, интенсивность отказов, средняя наработка до отказа (среднее время безотказной работы) и др.
Вероятность безотказной работы Р(t)
– вероятность того, что в заданном интервале времени t
не возникает отказ. При испытании или эксплуатации изделий вероятность безотказной работы определяется следующей статистической оценкой:
где N0
– число изделий в начале испытаний; n(t)
– число изделий, вышедших из строя за время t
; t
– время, для которого определяется вероятность безотказной работы.
При увеличении числа изделий N0
статическая оценка вероятности Р*
(t)
практически не меняется, т.е. Р(t)
= Р*
(t)
.
Интенсивность отказов
называется отношение числа изделий, отказавших в единицу времени, к среднему числу изделий, продолжающих исправно работать:
где n(Δt)
– число изделий, отказавших в интервале времени от t
– Δt/2
до t
Δt/2
; N
= (Ni
Ni 1
)/2
– среднее число изделий, исправно работающих в интервале Δt
;
Рисунок 10.1 – Типичная зависимость интенсивности отказов аппаратуры во времени
Типичная кривая изменения интенсивности отказов во времени представлена на рисунке 10.1. На участке 0 – t1
(участок приработки) из-за скрытых дефектов интенсивность отказов высока, но с течением времени уменьшается. Для систем управления длительность участка составляет десятки, а иногда сотни часов. Уменьшить его можно за счет предварительной отбраковки и обкатки элементов и блоков.
Участок t1
– t2
(участок нормальной эксплуатации) характеризуется примерным постоянством интенсивности отказов. Длительность участка – тысячи и десятки тысяч часов.
На участке t1
> t2
в результате износа и старения интенсивность отказов начинает возрастать. При достижении времени t2
дальнейшая эксплуатация системы нецелесообразна.
При постоянной интенсивности отказов λ(t)
= λ вероятность безотказной работы Р(t)
= е-λt
.
Средняя наработка до отказа
(среднее время безотказной работы) при постоянной интенсивности отказов Tср
= 1/λ.
Количественные показатели надежности используются при формировании требований к надежности проектируемых изделий, сравнении изделий по уровню надежности, определении объема запасных частей, расчете сроков службы изделий и т.д.
10.2.1 Общие сведения
Расчет надежности предназначен для определения количественных показателей надежности. Обычно определяют вероятность безотказной работы устройства.
Рассмотрим методы расчета надежности, применяемые на стадии проектирования устройств, при внезапных отказах, отсутствие резервирования, предположении равнонадежности всех однотипных элементов и постоянное интенсивности отказов элементов.
Надежная работа систем управления зависит от электрических режимов работы элементов, механических нагрузок и окружающей среды.
Перегрузка элементов током или напряжением приводит соответственно к перегреву или пробою электрической изоляции. Повышенные механические нагрузки (вибрации, удары и т.п.) вызывают повреждения элементов, ослабление монтажных соединений, обрывы, нарушения регулировок и т.д.
Повышенная влажность способствует снижению сопротивления изоляции, что может вызвать пробои и замыкания цепей. Влага вызывает коррозию рабочих поверхностей контактов и ухудшает их работу. При отрицательных температурах меняются свойства многих изоляционных материалов, происходят трещины и разрывы. Действие повышенной температуры окружающей среды эквивалентно увеличению электрической нагрузки.
Влияние электрических нагрузок и температуры окружающей среды на интенсивность отказов элементов оценивается с помощью соответствующих графиков, рисунок 10.2, 10.3.
Рисунок 10.2 – Зависимость интенсивности отказов конденсаторов от температуры окружающей среды и коэффициента нагрузки
Под коэффициентом нагрузкиКн
понимают отношение рабочего значения нагрузки Uр
к номинальному значению Uном
. Для конденсаторов определяющим параметром нагрузки является рабочее напряжение, для резисторов – мощность рассеяния, для электрических двигателей – рабочая мощность.
Учет влияния окружающей среды на интенсивность отказов осуществляется с помощью коэффициента k
= λ’/λтабл
, где λтабл
– табличное значение интенсивности отказов. Для лабораторных условий k
= 1, для производственных помещений k
= 2,5, для открытых площадок k
= 10.
Рисунок 10.3 – Зависимость интенсивности отказов углеродистых резисторовот температуры окружающей среды и коэффициента нагрузки
Исходные данные для проведения расчетов надежности получают из принципиальной электрической схемы устройства, с помощью которой определяют типы применяемых элементов и количество элементов каждого типа.
10.2.2 Методы расчета по среднегрупповым значениям интенсивностей отказов
Надежность рассчитывается следующим образом:
1) по принципиальной схеме системы управления (устройства) определяют тип применяемых элементов (резисторы, конденсаторы, реле, двигатели, транзисторы, диоды и т.д.), а также виды соединений (пайки, штепсельные разъемы и т.п.);
2) определяют количество элементов каждого типа и количество соединений;
3) по справочникам устанавливают интенсивность отказов элементов и соединений (как правило, в справочниках указаны максимальные и минимальные значения интенсивностей отказов);
4) учитывают влияние электрических нагрузок и окружающей среды;
5) определяют вероятность P(t)
и среднее время Тср
безотказной работы.
Пример
. Определить вероятность P(t)
и среднее время Тср
безотказной работы устройства, применяемого в производственном помещении, без учета влияния электрических нагрузок и температуры окружающей среды.
По принципиальной схеме определяем типы применяемых элементов (r
– число типов элементов) и количество элементов каждого типа (Ni
). Исходные данные результаты расчета целесообразно оформить в виде таблицы.
Таблица 10.1 – Расчет надежности
Элемент | N1 | λi, | Ni | ||
λi min | λi max | Ni | Ni | ||
Транзистор | 10 | 0,4 | 0,5 | 4 | 5 |
Резистор | 40 | 0,02 | 0,04 | 0,8 | 1,6 |
Конденсатор | 40 | 0,02 | 0,04 | 0,8 | 1,6 |
Интегральная схема | 10 | 0,1 | 1 | 1 | 10 |
Пайка | 300 | 0,001 | – | 0,3 | – |
Для производственных помещений k
= 2,5
Интенсивность отказов с учетом категорий помещений:
Среднее время безотказной работы:
Время безотказной работы рассчитывается по следующим формулам:
где t
– необходимое время эксплуатации устройства.
10.2./ Коэффициентный метод расчета надежности
При коэффициентном методе расчета надежности не абсолютные значения λi
интенсивностей отказов элементов, а их коэффициенты надежности Ki
, определяемые по соотношению
где λб
– интенсивность отказов базового элемента. За базовый принимается элемент, количественные характеристики надежности которого известны достоверно. Обычно в качестве базового элемента выбираются резисторы, конденсаторы.
Так как предполагается, что интенсивности отказов элементов всех типов меняются при изменении условий эксплуатации в одинаковой степени, то значение коэффициента надежности практически одно и то же в различных эксплуатационных условиях. Режимы работы и условия окружающей среды учитываются поправочными коэффициентами, как и в предыдущем методе.
Так как предполагается, что интенсивности отказов элементов всех типов меняются при изменении условий эксплуатации в одинаковой степени, то значение коэффициента надежности практически одно и то же в различных эксплуатационных условиях. Режимы работы и условия окружающей среды учитываются поправочными коэффициентами, как и в предыдущем методе.
Показатели надежности рассчитываются следующим образом:
В таблице 10.2 приведены значения коэффициентов надежности отдельных элементов.
Таблица 10.2 – Значения коэффициентов надежности
Элемент | Ki min | Ki max |
Полупроводниковый триод | 2,5 | 4,0 |
Полупроводниковый диод | 1 | 2,5 |
Реле | 3,3 | 5,5 |
Электродвигатель | 17 | 22 |
Разъем | 10,7 | 15,3 |
Коэффициентный метод расчета надежности прост и не требует знания значений интенсивностей отказов элементов, входящих в систему. Достаточно иметь сведения о коэффициентах надежности элементов и знать значение интенсивности отказов только одного базового элемента. Рассмотрим случаи, когда это обстоятельство является определяющим.
Как правило, в каждом литературном источнике представлены интенсивности отказов не всех элементов, входящих в сложную систему. Поэтому приходится использовать различные источники. Анализ показывает, что интенсивности отказов одних и тех же элементов в разных источниках могут различаться на один-два порядка.
Это объясняется тем, что авторы приводят значения интенсивностей отказов элементов для различных режимов и условий эксплуатации, которые существенно влияют на λi
. Применение коэффициентов надежности устраняет данный недостаток.
Проверка показала, что значения коэффициентов надежности элементов, приведенные в различных источниках, практически одни и те же, если в качестве λб
в каждом случае использовать интенсивность отказов базового элемента, указанную в том же источнике.
Наиболее целесообразно применение этого метода при сравнении надежности различных систем. Сравнение производится чаще по среднему времени безотказной работы:
где индексы «1» и «2» обозначают номера сравниваемых систем.
Из последнего выражения видно, что для сравнения систем по надежности необходимо знать элементный состав систем и коэффициенты надежности элементов. При этом не нужно количественные характеристики надежности элементов, в том числе базового.
Повысить надежность системы можно применением внутриэлесентной и структурной избыточности. Используются следующие способы введения внутриэлементной избыточности
: снижение коэффициентов электрических нагрузок; применение элементов с более высокими показателями надежности) облегчение условий работы элементов.
Снижение коэффициента электрической нагрузки может быть догтигнуто заменой данного элемента функционально подобным, но с бóльшей номинальной мощностью).
Облегчение условий работы элементов в местах их установки достигается за счет лучшей компоновки элементов в блоках, создания лучших условий для отвода теплоты с помощью вентиляционных отверстий, принудительного охлаждения и т.д.
Структурная избыточность
– это резервирование с применением дополнительных элементов структуры системы. Резервирование позволяет создавать надежные системы (устройства) из недостаточно надежных элементов. Но при этом усложняется схема, увеличиваются масса, габариты, стоимость устройства, время отыскания повреждения, затрудняется эксплуатационное обслуживание. Поэтому к резервированию прибегают, когда не удается обеспечить требуемую надежность другими методами.
Контрольные вопросы:
1. Что такое надежность, работоспособность, безотказность, долговечность, отказ?
2. Какие бывают отказы?
3. Поясните количественные характеристики надежности.
4. Как интенсивность отказов зависит от времени?
5. Как влияют на надежность электрические режимы работы элементов и окружающая среда? Как это влияние учитывается при расчете надежности?
6. каковы особенности метода расчета по среднегрупповым значениям интенсивностей отказов и коэффициентов метода расчетов?
7. Перечислите методы повышения надежности систем.
8. Каковы достоинства и недостатки резервирования?
1. Андреев А.В., Горлов М.И. Основы электроники /Серия «Учебники, учебные пособия». – Ростов н/Д: Феникс, 2003. – 416 с.
2. Брюханов В.Н. Автоматизация производства: Учеб. для сред. проф. учеб. заведений /В.Н. Брюханов, А.Г. Схиртладзе, В. П. Вороненко; Под ред. Ю.М. Соломенцева. – М.: Высш. Шк., 2005. – 367 с.: ил.
3. Гинзбург И.Б. Автоматическое регулирование и регуляторы в промышленности строительных материалов: Учебник для техникумов. Изд. 3-е, перераб. И доп. – Л.: Строиздат. Ленингр. отд-ние, 1985, 256 с., ил.
4. Дайнеко В.А. Электрооборудование сельскохозяйственных предприятий: учеб. пособие /В.А. Дайнеко, А.И. Ковалинский. – Минск: Новое знание, 2008. _ 320 с. : ил. – (Техническое преобразование).
5. Кацман М.М. Электрические машины автоматических устройств: учебное пособие для электротехнических специальностей техникумов. – М.: ФОРУМ, ИНФРА-М, 2002. – 264 с. – (Серия «Профессиональное образование»).
6. Кацман М.М. Электрический привод: Учебник для студ. образоват. учреждений сред. Проф. Образования /Марк Михайлович Кацман. – М.: Издательский центр «Академия», 2005. – 384 с.
7. Келим Ю.М. Типовые элементы автоматического управления. Учебное пособие для студентов учреждений среднего профессионального образования. – М.: ФОРУМ: ИНФРА-М, 2002. – 384 с.: ил. – (Серия «Профессиональное образование»).
8. Келим Ю.М. Электромеханические и магнитные элементы систем автоматики: Учеб. Пособие для средн. проф. учеб. заведений /Ю.М. Келим. – 2-е изд., исправл. и доп. – М.: Высш. шк., 2004. – 352 с.: ил.
9. Москаленко В.В. Электрический привод: Учеб. Пособие для студ. учреждений сред. Проф. Образования – М.: Мастерство; Высшая школа, 2001. – 368 с.
10. Тихонов В.Я. Элементы и системы электроавтоматики в пищевой промышленности. – М.: Легкая и пищевая пром-сть, 1984 – 264 с.
11. Системы автоматизированного управления электроприводами: Учеб. пособие./Г.И. Гулько, Ю.Н. Петренко, Е.П. Раткевич, О.Л. Симоненкова; Под общ. ред. Ю.Н. Петренко. – Мн.: Новое знание, 2004. – 384 с.: ил.
12. Шишмарев В.Ю. Автоматика: Учебник для сред. Проф. образования /Владимир Юрьевич Шишмарев. – М.: Издательский центр «Академия», 2005. – 288 с.
13. Шишмарев В.Ю. Типовые элементы систем автоматического управления: Учебник для сред проф. Образования /Владимир Юрьевич Шишмарев. – М.: Издательский центр «Академия», 2004. – 304 с.
Энергетическая безопасность государства. курсовая работа (т). физика. 2021-01-07
Введение
Актуальность работы обусловлена тем,
что энергоресурсы имеют важное значение для улучшения качества жизни и
расширения возможностей, открывающихся перед гражданами стран мира – как
развитых, так и развивающихся. Поэтому обеспечение эффективного, надежного и
экологически безопасного энергоснабжения по ценам, отражающим фундаментальные
принципы рыночной экономики, представляет собой вызов для нашей страны и всего
человечества.
Можно сказать, что на данный момент
не выработано единое понимание самого понятия энергетической безопасности
государства (ЭБГ), а в ряде случаев значения, которые страны вкладывают в это
понятие, прямо противоположны друг другу. Но в контексте понимания этого
понятия как глобального, энергетическая безопасность означает не только
предотвращение конфликтов за энергетические ресурсы между поставщиками и
потребителями, внутри группы стран-поставщиков и внутри группы
стран-потребителей, но и расширение доступа к энергетическим ресурсам.
Невозможность развития экономики без энергетики означает также невозможность
преодоления проблем, которые давно признаны мировым сообществом как глобальные:
бедность, эпидемии, низкий уровень образования, угрозы экологии и др. Из этого
следует вывод, что энергетическая безопасность является составной частью
глобальной системы безопасности.
На данный момент в мировом сообществе
существует понимание того, что углеводородные ресурсы, являющиеся на данный
момент базовыми, могут быть исчерпаны через определенное время. Соответственно
страны-поставщики, так же, как и все остальные, будут постепенно приходить к
необходимости изменения структуры своего топливно-энергетического баланса,
уделяя все большее внимание альтернативным источникам энергии.
Сохранение ситуации, при которой 2
млрд. людей не имеют доступа к энергетическим ресурсам, грозит гуманитарными
катастрофами, ростом напряженности в мире, появлением новых конфликтов и
усугублением имеющихся глобальных проблем. И именно в рамках международного
механизма по обеспечению энергетической безопасности возможен выход за пределы
исключительно торгово-финансовых энергетических взаимоотношений отдельных
стран, и создание системы устойчивого обеспечения энергетическими ресурсами
всех стран.
Основной сферой деятельности данной
инстанции должно стать обеспечение глобальной энергетической безопасности путем
предотвращения и разрешения конфликтов в данной сфере, а также путем управления
глобальным сбалансированным энергетическим потенциалом. Для этого необходимо
достижения максимально широкого согласия стран, которые на данный момент в
качестве поставщиков или потребителей имеют устойчивый доступ к энергетическим
ресурсам. Ключевой целью управления глобальным энергетическим потенциалом
должно стать как поддержание энергетической ресурсной базы планеты, так и ее
справедливое распределение. В ближайшее время на первый план в этом направлении
выйдет задача обеспечения энергетическими ресурсами тех стран, которые пока не
имеют к ним устойчивого доступа и лишены возможности обеспечить это за счет
слабости экономики или иных факторов.
Международный механизм глобальной
энергетической безопасности мог бы стать той инстанцией, которая от имени
международного сообщества управляла как подобными международными
энергетическими центрами, так и иными организациями или формами, нацеленными на
создание глобального сбалансированного энергетического потенциала.
Цель работы – раскрыть сущность
понятия энергетической безопасности и указать на основные проблемы, связанные с
ее обеспечением.
Для достижения поставленной цели
необходимо решение следующих задач:
·
дать определение
энергетической безопасности;
·
описать критерии,
по которым можно оценить энергетическую безопасность страны;
·
дать анализ
состояния энергетической безопасности РФ;
·
описать возможные
угрозы энергетической безопасности государства и пути их нейтрализации.
Объектом данного исследования
является проблема энергетической безопасности. Предмет изучения – современная
мировая экономика в части обеспеченности природными ресурсами и энергетический
потенциал отдельных стран.
Информационная база курсовой работы
включает: нормативно-правовые акты, статистические материалы, труды ведущих
отечественных и зарубежных авторов, посвященные проблемам экономической
безопасности, статьи, опубликованные в периодических изданиях, а также
Интернет-ресурсы.
Курсовая работа состоит из введения,
трех глав основного текста, заключения, списка использованных источников,
приложений. Содержание работы изложено на 35 страницах машинописного текста, и
включает 1 рисунок, 3 таблицы. Список использованных источников включает 21
наименований.
1. Теоретические аспекты исследования
энергетической безопасности государства
1.1 Энергетическая безопасность
государства: понятие, сущность
В последнее время в высших эшелонах
власти большое внимание уделяется вопросам энергетической безопасности (ЭБ).
Эта тема была обозначена Россией как одна из важнейших при формулировке
повестки дня саммита лидеров стран «Группы восьми», состоявшегося в 2006 г. в Санкт-Петербурге. Вопросы ЭБ признаны актуальными мировым сообществом.
Однако, несмотря на повышенный
интерес к проблемам ЭБ со стороны политических лидеров, понятие ЭБ не
определено даже в таком документе как документ о Глобальной энергетической
безопасности, принятый на саммите «Группы восьми» в 2006 г. Напротив, в научных работах это понятие подвергается анализу.
Такая ситуация может привести к
недопониманию сущности ЭБ, нестыковки теории (научных разработок) и практики
(государственного регулирования, поддержки отдельных проектов в сфере
энергетики и др.).
В общем виде безопасность – это
состояние защищенности жизненно важных интересов личности, общества и
государства от внутренних и внешних угроз. Как следует из приведенного
определения, к объектам безопасности относятся: личность – ее права и свободы;
общество – его материальные и духовные ценности; государство – его
конституционный строй, суверенитет и территориальная целостность[1].
Жизненно важные интересы представляют
собой совокупность потребностей, удовлетворение которых надежно обеспечивает
существование и возможности прогрессивного развития объекта безопасности. Под
угрозой, в свою очередь, понимается совокупность условий и факторов, стечение
обстоятельств, значительно увеличивающих риски жизнедеятельности объекта.
Энергетическая безопасность
подразумевает состояние защищенности страны (региона), ее граждан, общества,
государства, экономики от угрозы дефицита в обеспечении их обоснованных
потребностей в энергии экономически доступными топливно-энергетическими
ресурсами приемлемого качества, а также защищенности от нарушений стабильности,
бесперебойности топливо- и энергоснабжения[2].
1.2 Цель и принципы обеспечения энергетической
безопасности государства
Целью политики ЭБГ является
последовательное достижение качественно нового уровня ее главных характеристик[3]:
· способности ТЭК надежно обеспечивать
экономически обоснованный внутренний и внешний спрос энергоносителями
соответствующего качества и приемлемой стоимости;
· способности потребительского сектора
экономики эффективно использовать энергоресурсы, предотвращая тем самым
нерациональные затраты общества на свое энергообеспечение и дефицитность
топливно-энергетического баланса;
· устойчивости энергетического сектора
к внешним и внутренним экономическим, техногенным и природным угрозам, а также
его способности минимизировать ущерб, вызванный проявлением различных
дестабилизирующих факторов.
Важнейшими принципами обеспечения
энергетической безопасности являются[4]:
· гарантированность и надежность
энергообеспечения экономики и населения страны в полном объеме в обычных
условиях и в минимально необходимом объеме при угрозе или возникновении
чрезвычайных ситуаций различного характера;
· восполняемость исчерпаемого ресурса
(темпы потребления исчерпаемых ресурсов топлива должны согласовываться с
темпами освоения замещающих их источников энергии);
· диверсификация используемых видов
топлива и энергии (экономика не должна чрезмерно зависеть от какого-либо одного
энергоносителя);
· учет требований экологической
безопасности (развитие энергетики должно быть сбалансировано с возрастающими
требованиями охраны окружающей среды);
· предотвращение энергорасточительства
(взаимосвязь с политикой энергетической эффективности);
· создание экономических условий
(прежде всего за счет налоговых и таможенных мер), обеспечивающих
равновыгодность поставок энергоресурсов на внутренний и внешние рынки и
рационализацию структуры экспорта;
· максимально возможное использование
во всех технологических процессах и проектах конкурентоспособного
отечественного оборудования.
1.3 Критерии и показатели оценки
уровня энергетической безопасности государства
Для оценки уровня энергетической
безопасности государства можно применить следующий состав показателей
(индикаторов)[5]:
1. Индикаторы обеспеченности
электроэнергией:
· доля собственной выработки (отношение выработки
электроэнергии электростанциями к годовому потреблению электроэнергии);
· производство электроэнергии на душу населения
(отношение производства электроэнергии к численности населения);
· потребление электроэнергии на душу населения в
коммунально-бытовом комплексе (отношение потребления электроэнергии в
коммунально-бытовом комплексе к численности населения).
2. Индикаторы обеспеченности тепловой
энергией:
· коэффициент покрытия (отношение суммарной
располагаемой мощности источников теплоснабжения к максимальной годовой
потребности в тепловой нагрузке);
· производство тепловой энергии на душу населения
(отношение производства тепловой энергии к численности населения);
· расход котельно-печного топлива (КПТ) (отношение
фактического расхода топлива к нормативу);
· доля введённых источников теплоснабжения (отношение введённых
источников теплоснабжения к числу действующих источников теплоснабжения);
· коэффициент потерь тепловой энергии (отношение потери
тепловой энергии к произведенному количеству);
· среднее число аварий на один источник теплоснабжения (отношение числа аварий на источниках теплоснабжения к числу
источников теплоснабжения);
· коэффициент износа тепловых и паровых сетей (отношение
протяженности тепловых и паровых сетей, нуждающихся в замене к общей
протяженности).
2. Анализ и оценка уровня энергетической
безопасности государства (на примере России)
2.1 Основные энергетические
показатели развития страны
В таблице 1 собраны основные
энергетические показатели развития России по электрической и тепловой
энергетике с 2000 по 2009 годы. На основании этих данных в параграфе 2.2 дан
анализ и оценка уровня энергетической безопасности.
Таблица 1. Сведения об основных
энергетических показателях России по годам[6].
Показатель | Год | ||||||||||
2000 | 2001 | 2002 | 2003 | 2004 | 2005 | 2006 | 2007 | 2008 | 2009 | ||
1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | |
1 | Численность населения РФ, в чел. | 146596869 | 145976482 | 145306497 | 144565928 | 143821212 | 143113885 | 142487259 | 142114903 | 141956409 | 141842844 |
2 | Выработка эл. эн. электростанциями, в млрд. кВтч | 877,8 | 891,3 | 894,3 | 916,3 | 939,9 | 954,1 | 996,2 | 1042,1 | 1040,3 | 1013,5 |
3 | Потребление электроэнергии по РФ, в млрд. кВтч | 861 | 874,5 | 877,5 | 899,5 | 923,1 | 937,3 | 979,4 | 1025,3 | 1022,7 | 995,9 |
4 | Потребление электроэнергии в коммунально-бытовом комплексе | 187,4 | 196,0 | 207,4 | 222,2 | 243,5 | 253,7 | 262,7 | 272,4 | 280,6 | 278,4 |
5 | Суммарная мощность источников теплоснабжения, гигакал. в | 664862,4 | 658330,9 | 654681,1 | 661933,4 | 657203,4 | 623210,6 | 619984,01 | 602622,5 | 590758,9 | 590686,8 |
6 | Максимальная годовая потребность в тепле, гигакал. в час. | 499339,3 | 495138,8 | 489876 | 491609 | 482195,3 | 476104,8 | 472354,3 | 452165,5 | 433702 | 434448 |
7 | Произведено тепловой энергии, в тыс. гигакал | 998678,3 | 990277,4 | 979751,9 | 983218,2 | 964390,6 | 952209,7 | 944708,37 | 904330,9 | 867403,88 | 868895,95 |
8 | Произведено тепловой энергии когенерационными тепловыми | – | – | – | – | – | – | 19705,3 | 18171,5 | 14356,8 | 13392,9 |
9 | Потери тепловой энергии, в тыс. гигакал. | 98083,2 | 108427 | 111702,7 | 112086,9 | 113014,3 | 115977,9 | 120316,23 | 112892,2 | 113088,8 | 118805,21 |
10 | Отпущено тепловой энергии потребителям, в тыс. гигакал. | 1039576,5 | 1005590,2 | 985238,1 | 978765 | 955423,5 | 945649,6 | 946124,87 | 925174,4 | 899839,73 | 894885,79 |
11 | Расход топлива фактически в РФ, в тыс. тонн условного | 176855,5 | 173186,1 | 207111,2 | 167120,6 | 162965,2 | 162135,5 | 174559,85 | 162033,61 | 150544,12 | 150947,11 |
12 | Расход топлива по норме в РФ, в тыс. тонн условного | 178118,8 | 174246,7 | 173215,7 | 168872,9 | 164677,7 | 163381,8 | 178572,5 | 164370,08 | 152797,71 | 152512,41 |
13 | Число источников теплоснабжения, в единицах | 67913 | 67775 | 67890 | 67703 | 66936 | 64895 | 65985 | 70232 | 72161 | 73136 |
14 | Введено источников теплоснабжения, в единицах | 1960 | 1643 | 1842 | 1706 | 1374 | 1576 | 2009 | 2400 | 2729 | 2887 |
15 | Количество котлов (энергоустановок), в единицах. | 192216 | 191513 | 190034 | 186933 | 183737 | 180063 | 179023 | 184763 | 188404 | 189053 |
16 | Число аварий на источниках теплоснабжения, паровых и | 96365 | 107539 | 86948 | 112087 | 34519 | 27605 | 22592 | 20217 | 17045 | 12943 |
17 | Протяженность тепловых и паровых сетей в двухтрубном | 186586,1 | 197546,6 | 183545,1 | 180727,7 | 179031,3 | 177174,9 | 176514,13 | 173073,7 | 172021 | 171995,6 |
18 | Протяженность тепловых и паровых сетей в двухтрубном | 30273,1 | 39325,8 | 33698,1 | 33135,6 | 34566,6 | 44669,3 | 44179,67 | 44830,2 | 45020,6 | 46318,4 |
19 | Заменено тепловых и паровых сетей в двухтрубном | – | – | – | – | – | 5912,5 | 5706,6 | 5151,2 | 5417,3 | 4540,7 |
20 | Экономия от работ по модернизации, тыс. руб. | – | – | – | – | – | – | – | – | 860133,5 | 507602 |
21 | Экономия от проведенных мероприятий по энергосбережению, | – | – | – | – | – | – | – | – | 1671334,6 | 2353904,5 |
2.2 Оценка уровня энергетической
безопасности государства
В таблице 2 приведён расчёт
показателей, перечисленных в параграфе 1.3 и вычисленных на основании данных в
таблице 1.
Таблица 2. Оценка энергетической безопасности
государства
Показатель (рассчитывается из табл. 1) | Год | ||||||||||
2000 | 2001 | 2002 | 2003 | 2004 | 2005 | 2006 | 2007 | 2008 | 2009 | ||
1 | 2 | 3 | 4 | 5 | 7 | 8 | 9 | 10 | 11 | ||
1 | Доля собственной выработки эл. эн. (строка 2 /строка3) | 1,01951 | 1,01921 | 1,01915 | 1,01868 | 1,0182 | 1,01792 | 1,01715 | 1,01639 | 1,01721 | 1,01767 |
2 | Производство электроэнергии на душу населения в кВтч, | 5988 | 6106 | 6155 | 6338 | 6535 | 6667 | 6992 | 7332 | 7328 | 7145 |
3 | Потребление электроэнергии на душу населения в | 1278 | 1343 | 1427 | 1537 | 1693 | 1773 | 1844 | 1917 | 1977 | 1963 |
4 | Коэф-т покрытия тепловой энергией, (ст.5/ст.6) | 1,33148 | 1,32959 | 1,33642 | 1,34646 | 1,36294 | 1,30898 | 1,31254 | 1,33275 | 1,36213 | 1,35963 |
5 | Производство тепловой энергии на душу населения в | 6,81241 | 6,78381 | 6,74266 | 6,80118 | 6,70548 | 6,65351 | 6,63013 | 6,36338 | 6,11035 | 6,12577 |
6 | Расход КПТ в %, (ст.11/ст.12) | 99,29 | 99,39 | 119,5 | 98,96 | 98,96 | 99,23 | 97,75 | 98,57 | 98,52 | 98,97 |
7 | Доля введённых источников теплоснабжения в %, | 2,886 | 2,424 | 2,713 | 2,519 | 2,052 | 2,428 | 3,044 | 3,417 | 3,781 | 3,947 |
8 | Коэф-т потерь тепловой энергии в %, (ст.9/ст.7) | 9,8213 | 10,9492 | 11,4011 | 11,4 | 11,7187 | 12,1799 | 12,7358 | 12,4835 | 13,0376 | 13,6731 |
9 | Среднее число аварий на один источник теплоснабжения, | 1,418 | 1,586 | 1,280 | 1,655 | 0,515 | 0,425 | 0,342 | 0,286 | 0,236 | 0,176 |
10 | Коэф-т износа тепловых и паровых сетей в %, (ст.18/ст.17) | 16,22 | 19,90 | 18,35 | 18,33 | 19,30 | 25,21 | 25,02 | 25,90 | 26,17 | 26,93 |
Россия отстаёт в производстве
электроэнергии на душу населения от большинства развитых стран (например от США
в 2 раза), но значительно превосходит развивающиеся страны (например Китай в 6
раз);
· В среднем по РФ большой запас
мощности по выработке тепла, более трети, об этом свидетельствует коэффициент
покрытия тепловой энергией;
· Расход топлива фактический
незначительно меньше, чем запланировано по норме. Об этом свидетельствует
показатель расхода КПТ в таблице 2;
· Огромны потери тепловой энергии
(строка 8), которые увеличиваются от года к году. Так с 2000 по 2009 годы они
выросли в 1,39 раза. Этот рост обусловлен старением энергетических установок и
тепловых сетей, а также отсутствием должного внимания к ним;
· Ещё более впечатляет коэффициент
износа тепловых и паровых сетей: в 2009 г. 26,93 %, а с 2000 по 2009 год он вырос в 1,66 раза;
· Среднее число аварий на один источник
теплоснабжения заметно сократилось: за 10 лет раз в 10.
2.3 Нормативно-правовые основы
обеспечения энергетической безопасности государства
Основная цель создания
нормативно-правовой базы энергетической безопасности – устранить и преодолеть
противоречия, определить круг ответственности в системе обеспечения
потребителей энергоресурсами. Ниже представлен типовой набор
нормативно-правовых документов[7].
1. Закон об энергетической безопасности.
Определяет ответственность органов
власти и участников процесса энергообеспечения области. Создает условия
функционирования системы энергетической безопасности.
2. Закон «Об обеспечении
потребителей тепловой и электрической энергией на территории».
Составляется с учетом изменения
статуса региональных энергетических комиссий и началом функционирования
независимых производителей энергии.
3. Закон «Об использовании газа на
территории».
Закладывает основы правового
регулирования в использовании газа, определяет ответственность органов власти и
участников процесса в использовании газа.
4. Закон об использовании газа в
виде газомоторного топлива.
Закон устанавливает условия
функционирования рынка моторного топлива, ответственность и права участников процесса
органов управления, предприятий и организаций, создает условия для
функционирования рынка топлива.
5. Закон «Об энергетическом
заказе».
Одной из причин нарастающей угрозы
энергетической безопасности – неплатежи и в первую очередь бюджетной сферы. Законом
устанавливается порядок ежегодного формирования заказа на обеспечение энергией
бюджетной сферы с дальнейшим включением этих затрат в ежегодный закон субъекта
РФ о бюджете с включением этих затрат в защищаемую строку.
6. Закон «О принципах тарифной политики
на топливо, электро- и теплоэнергии».
Сегодня РЭК пользуется методиками
ФЭК, зачастую нарушая законодательство. Закон приводит в соответствие
законодательную базу. Закон также определяет условия установки тарифов на
рынке.
7. Закон «О льготах на топливо,
электро и теплоэнергию и источниках покрытия выпадающих доходов
энергоснабжающих организаций».
Имеющиеся льготы, которые даются
потребителям на региональном и муниципальном уровне не обеспечивают покрытия
вкладывающих доходов энергоснабжающих организаций, что приводит к значительной
финансовой потере, а следовательно к снижению энергетической безопасности.
Закон позволяет устранить эти противоречия.
8. Закон «О сертификации продукции
и услуг по энергоэффективности».
Сертификации продукции по энергоэффективности
в Российской Федерации и в регионах нет. До введения в действие федеральных
законов, создается региональный закон, определяющий требования к качеству
энергии, услуг по передаче энергии, энергетической эффективности производимой
промышленной продукции.
9. Постановление «О нормировании
потребления энергоресурсов в бюджетной сфере и применении методики расчета
лимитов на энергопотребление».
Действующие нормативы потребления
значительно устарели и не дают реальной картины потребления. Постановление
определяет порядок введения в действие методик расчета норм и лимитов
потребления.
10. Пакет документов администрации
и РЭК о тарифной политике в исполнении закона.
В порядке реализации закона о порядке
формирования тарифов.
11. Пакет документов о мотивации
энергосбережения.
В порядке реализации закона «Об
основах энергосбережения на территории».
12. Пакет документов о
формировании энергосберегающего поведения.
13. Постановление «О создании
механизмов страховой защиты имущественных интересов производителей и
потребителей энергоресурсов.
Защита интересов участников
энергообеспечения от рисков и угроз.
14. Постановление «О создании
системы управления энергетической безопасностью.
3. Угрозы энергетической безопасности
и направления их нейтрализации (на примере России)
3.1 Возможные (потенциальные) угрозы энергетической
безопасности государства
На состояние энергетической
безопасности влияет широкий круг факторов, касающихся ресурсной и
производственной базы энергетики, уровень развития экономики и качество
межхозяйственных связей.
Выделяются следующие ее аспекты[8]:
·
функциональные
свойства систем энергетики, как системы повышенной опасности;
·
защищенность
энергетических интересов от внутренних и внешних угроз.
Если первое направление
обеспечивается техническими регламентами и правилами, то второе регулируется
управляющими воздействиями органами власти федерации и региона.
Для выявления тенденций и
формирования прогноза состояния необходимо провести учет, анализ и оценку угроз
(таблица 3).
Таблица 3. Угрозы и их последствия[9]
Угрозы | Последствия |
1. Экономические угрозы. | |
1.1. Острый дефицит инвестиционных ресурсов, | – Физический и моральный износ оборудования, вывод его из – Отставание ввода новых мощностей, опережение роста – Рост аварийности оборудования и недоотпусков энергии – Рост объемов аварийно-восстановительных и ремонтных – Увеличение потребления энергоресурсов от внешних – Увеличение доли неоптимальных, аварийновынужденных |
1.2. Диспропорции цен на ТЭР в результате неэффективности | – Отсутствие рыночных отношений и конкуренции в |
1.3. Рост неплатежей и задолженностей за поставляемые | – Цепная финансовая дестабилизация, задержки выплаты – Информационная «война», порождающая социальную – недополучение налоговых и иных платежей в бюджеты разных |
1.4. Неэффективное использование топливно-энергетических | – Перерасход энергетических ресурсов и финансовых средств |
1.5. Слабость хозяйственных связей. | – Недопоставки ресурсов, нарушения сроков поставки, |
2. Технические угрозы. | |
2.1. Низкий технический уровень и качество оборудования, | – Рост количества, объемов и последствий аварий и – Рост объемов недоотпуска энергоресурсов и экономических – Увеличение загрязнения окружающей среды. – Рост опасности для жизни людей (персонала и населения). |
2.2. Угроза – отсутствие владельцев электрической и | – Отсутствие ответственных за техническое состояние |
2.3. Нерациональное размещение производительных сил, | см. последствия 1.1. – Рост количества каскадных (цепных) аварий. – Рост последствий неэнергетических аварий. |
2.4. Нарушение устойчивости электроснабжения от внешних | – Недоотпуск электроэнергии потребителям, в т.ч. – веерное отключение потребителей. |
2.5. Нарушение устойчивости теплоснабжения населения и | – Резкий рост социальных проблем при низких температурах. – Рост числа заболеваний и обострение болезней. – Эвакуация жителей и охрана жилья |
2.6. Нарушение устойчивости топливоснабжения. | – Снижение объемов выработки и отпуска электрической и – Переход на топливо низшего качества. – Снижение объема предоставляемых энергетических услуг. |
2.7. Снижение технической безопасности ТЭК. | – Перспектива лавинообразного выхода из строя |
2.8. Отсутствие развитого рынка топлива и энергии. | – Дефицит электроэнергии при наличии внутренних топливных – Монополизм энергетического рынка. – Отсутствие резервов и взаимопомощи при авариях. |
2.9. Снижение экологической безопасности. | – Рост выбросов и загрязнений. |
2.10. Стихийные бедствия – наводнения, ураганы, оползни, | – Рост аварийности оборудования. – Рост объемов недоотпуска. |
3. Управленческо-правовые угрозы. | |
3.1. Неэффективность реализации экономической и | – Экономические последствия по п.1. |
3.2. Неэффективность энергосберегающей политики. | – Перерасход энергоресурсов. – Перерасход бюджетных средств. |
3.3. Низкий уровень правового обеспечения регулирования | – Перерасход ресурсов. – Криминализация энергетических бизнесов. – Монополизация энергетического рынка. |
3.4. Чрезмерное вмешательство органов власти в управление | – Угнетенный менеджмент энергоснабжающих организаций. |
4. Социально-политические угрозы | |
4.1. Забастовки и другие трудовые конфликты на | – Ограничение отпуска энергии. |
4.2. Региональные политические конфликты, сопровождаемые | – Повреждение оборудования, ограничение отпуска энергии. |
4.3. Действие общественных движений антиатомной, | – Блокирование принятия решений и осуществления |
4.4. Противоправные действия региональных органов власти и | – Рост тарифов. – Ограничения отпуска энергоресурсов. – Замораживание инвестиций. |
3.2 Стратегические направления
нейтрализации угроз энергетической безопасности государства
Для управления энергетической
безопасностью РФ необходимо обеспечить[10]:
• мониторинг энергетической
безопасности по показателям (индикаторам);
• идентификацию существующих и
прогнозируемых угроз энергетической безопасности;
• поиск наилучших путей
преодоления угроз;
• ввод в действие принятых
мероприятий;
• анализ эффективности
реализованных мероприятий.
Предлагается создать технологию,
основанную на использовании «сценарных» методов управления.
Для создания системы обеспечения
энергетической безопасности необходимо выполнение следующих мер[11].
1. Должна быть сформирована система
объективных показателей (индикаторов) энергетической безопасности. Для этого
необходимо собрать и проанализировать состояние защищенности жизненно важных
интересов населения, предприятий, муниципальных образований и субъекта РФ в
целом в настоящее время и в прогнозируемой перспективе. На основе этого анализа
формируется перечень показателей с указанием степени их значимости и связанных
с ними угроз. Примерный перечень индикаторов энергетической безопасности был
приведен выше.
Индикаторы могут быть как
количественными, так и качественными, отражающими мнение экспертов. По каждому
показателю необходимо разработать границы «нормального» изменения показателя, в
рамках которых считается, что угрозы энергетической безопасности нет.
2. Для идентификации уже существующих
угроз энергетической безопасности требуется проведение мониторинга показателей.
В результате мониторинга энергетической безопасности должно обеспечиваться
непрерывное (или периодическое) наблюдение за всей совокупностью процессов и
состояний топливно-энергетического комплекса с позиций энергетической
безопасности.
Объектами мониторинга являются:
• электрические станции,
котельные, электрические и тепловые сети и другие объекты энергетики, главной
хозяйственной функцией которых является снабжение потребителей энергией и
топливом;
• территориально-хозяйственные
объекты, обеспечивающие надежность, живучесть, резервируемость и
взаимозаменяемость в обеспечении населения, территории, и хозяйственные
комплексы топливом и энергией;
• системы управления регионом,
муниципальными образованиями и производственными комплексами;
• природно-климатические
объекты, изменение состояния которых может вызывать крупномасштабные негативные
последствия для топливо и энергообеспечения;
• система управления
персоналов важнейших энергетических объектов и производств.
Если мониторинг показывает, что
показатели не выходят за допустимые границы значений, угроза не фиксируется.
Если фиксируется выход некоторого показателя за установленные границы,
проводится анализ с целью локализации отклонения, выявления остроты угрозы
энергетической безопасности, характера и особенностей их проявления, а также
для выявления причин отклонений.
Для анализа может быть использованы
заранее составленные сценарии, связывающие перечень угроз со значениями
индикаторов. Выявленная причина фиксируется как проблемная ситуация.
3. Для идентификации потенциальных
угроз (рисков), проводится периодический анализ ситуации экспертами. Группа
экспертов проводит оценку (диагностику) существующего и ожидаемого уровня
энергетической безопасности. Сопоставляется перечень возможных угроз с текущим
положением дел. При прогнозировании определенной угрозы фиксируется проблемная
ситуация.
4. Для выявленных экспертами
проблемных ситуаций определяются наилучшие пути их устранения (комплексы
мероприятий).
Для каждой из проблемных ситуаций
может быть заранее сформирован комплекс мер по нейтрализации угроз (в виде
административных и экономических решений). Предлагаемые меры могут быть двух
типов: устраняющие ситуацию и компенсирующие. Компенсирующие меры применяются в
случае, когда невозможно устранить кризисную ситуацию. Они позволяют, не
устраняя проблемы, улучшить значение показателей.
Могут быть разработаны альтернативные
варианты мер. В этом случае должны быть разработаны критерии выбора лучших
альтернатив (например, время уст-ранения проблемной ситуации, уменьшение
потерь, затраты на устранение). Необходимо определить, как сочетаются комплексы
мер по устранению каждой из выявленных проблемных ситуаций и выбрать
оптимальное сочетание мероприятий.
5. Формируются планы по реализации
комплекса мероприятий (с указанием затрат, их источника, сроков, исполнителей)
и осуществляется их реализация. В хо-де выполнения мероприятий по преодолению
или нейтрализации угроз проводится контроль их выполнения и анализ
эффективности.
Для реализации описанной технологии
необходимо создать систему управления обеспечения энергетической безопасности (СУЭБ)
субъекта РФ. Для работы по данной технологии необходимо провести подготовку
кадров, участвующих в обеспечении энергетической безопасности.
Схема управления энергетической
безопасностью
Для управления энергетической
безопасностью субъекта РФ предлагается схема управления (рис.1), относящаяся к
матричному типу управления[12].
Матричная структура используется предприятиями и организациями со сложной
деятельностью, действующими в нестабильных условиях, когда возникает
потребность в реализации разнотипных масштабных мероприятий.
1. Государственная Дума (ГД). В общей
схеме управления реализацией программы она играет роль утверждающей инстанции и
осуществляющей общий контроль. В число задач, выполняемых ГД, входят:
• утверждение приоритетных
направлений обеспечения энергетической безопасности;
• контроль за ходом реализации
мероприятий по обеспечению энергетической безопасности.
2. Глава администрации субъекта РФ.
Осуществляет общее руководство. Основные функции, выполняемые им:
• постановка оперативных и
долгосрочных целей обеспечения ЭБ;
• общий контроль за бюджетом и
финансовой деятельностью;
• обеспечение развития процессов
управления и организационной структуры;
• назначение руководителя СУЭБ.
3. Руководитель СУЭБ. Назначается из
числа замов главы администрации субъекта РФ. Руководитель выполняет следующие
функции:
• осуществляет стратегическое и
тактическое управление;
• назначает руководителей направлений
и администратора СУЭБ;
• координирует деятельность
руководителей направлений;
• разрабатывает совместно с НТС сводный
годовой план и формирует сводный бюджет;
• контролирует выполнение годового
плана и исполнение бюджета.
4. Руководители направлений (по видам
ресурсов). Назначаются из числа руководителей высшего звена субъекта РФ. Их
основная задача состоит в привлечении квалифицированной команды для реализации
мероприятий по обеспечению ЭБ и в создании ей нормальных условий для работы.
Руководители направлений:
• подбирают администраторов и
исполнителей для работы над реализацией мероприятий;
• осуществляют стратегическое и
тактическое управление направлением;
• разрабатывают совместно с НТС
годовой план и формируют бюджет по направлению;
• контролируют выполнение плана и
исполнение бюджета по направлению.
5. Администратор СУЭБ. Назначается
руководителем программы. Администратор выполняет функции оперативного
руководителя всех мероприятий по обеспечению ЭБ и подчиняется непосредственно
руководителю СУЭБ. Он, во-первых, должен обеспечить условия для работы по
каждому направлению, а во-вторых, координирует мероприятия по всем
направлениям. К числу основных задач администратора относятся:
• оперативное руководство ходом
реализации мероприятий по обеспечению энергетической безопасности;
• текущий мониторинг по показателям
энергетической безопасности;
• организация оперативного
взаимодействия администраторов направлений;
• координация работы по всем
направлениям.
6. Администраторы направлений.
Назначаются руководителями направлений. Они выполняют функции оперативного
руководителя всех мероприятий по направлению и подчиняются непосредственно
руководителям направлений, находясь также в оперативном подчинении
администратору СУЭБ. Администраторы направлений:
• выполняют оперативное руководство
реализацией мероприятий по направлению;
• осуществляют мониторинг по
показателям направления.
7. Научно-технический совет (НТС).
НТС формируется из представителей высшего руководства администрации субъекта
РФ, руководителей и администраторов направлений. Совет выполняет штабные
функции при руководителе СУЭБ. Основная цель НТС – определение общей стратегии
по обеспечению ЭБ и стратегическое управление реализацией мероприятий.
Руководителем НТС назначается руководитель СУЭБ.
НТС решает следующие задачи:
• определение приоритетных
мероприятий;
• распределение мероприятий на две
группы: к первой относятся мероприятия, которые должны выполняться без
дополнительного финансирования (основные мероприятия); ко второй – мероприятия,
требующие дополнительного финансирования (дополнительные мероприятия);
• утверждение первоочередных
мероприятий, объемов их финансирования и сроков реализации;
• оценка выполнения мероприятий по
критериям;
• заслушивание и утверждение отчетов
руководителей направлений;
• утверждение изменений в комплексе
мероприятий;
• утверждение результатов экспертизы
отчетов о реализации мероприятий, проведенных экспертными группами;
• стимулирование работы подразделений
и отдельных лиц;
• разрешение конфликтных ситуаций.
8. Рабочая группа (РГ). Включает 2-3
исполнителей, находящихся в подчинении у главного администратора СУЭБ. РГ
создается для оперативной координации действий по реализации мероприятий. РГ
решает следующие основные задачи:
• подготовка материалов для работы
НТС, в том числе рекомендаций по исполнителям мероприятий, срока, объемам
финансирования и т.д.;
• оперативная оценка хода реализации
мероприятий;
• обеспечение оперативного
взаимодействия лиц и подразделений СУЭБ;
• организация работы по оценке
эффектов от внедрения мероприятий;
• подготовка информации для НТС о
расходовании денежных средств и эффективности их использования;
• подготовка предложений по
совершенствованию финансовых, экономических механизмов реализации мероприятий,
структуры управления;
• подготовка предложений по
корректировке комплекса мероприятий.
9. Информационная система.
Представляет собой централизованную базу данных СУЭБ, которая оперативно
обновляется и пополняется. База данных должна содержать: показатели
энергетической безопасности; границы их «нормальных» значений и фактические
значения; перечень возможных угроз (проблемных ситуаций); сценарии, связывающие
показатели с проблемными ситуациями; комплексы мероприятий по устранению
проблемных ситуаций. Система должна позволять:
• выявлять проблемные ситуации
(угрозы энергетической безопасности);
• выбирать меры устранения угроз,
сравнивать их с помощью некоторых критериев и выбирать оптимальные;
• формировать стратегические и
оперативные планы по направлениям;
• контролировать ход выполнения
мероприятий и оценивать их эффективность.
Централизованная информационная
система играет координирующую роль, позволяет исполнителям в максимальной
степени использовать результаты работы других исполнителей, использовать единые
методики, инструментальные средства.
10. Эксперты. При рабочей группе
формируется команда экспертов-консультантов, которые по мере необходимости
привлекаются для решения следующих задач:
• оценка качества выполнения
мероприятий;
• оказание консультационных услуг
НТС;
• подготовка предложений по
совершенствованию СУЭБ.
11. Исполнители. Исполнители
мероприятий набираются как из сотрудников администрации субъекта РФ, так и со
стороны (например, из предприятий АО «Энерго», АО «Водоканал» и т.д.). Привлечение
исполнителей осуществляется на основе контрактов на конкретные виды работ с
указанием взаимных обязательств сторон. Набор исполнителей осуществляется на
конкурсной основе.
Для реализации мероприятий
утверждается собственный бюджет. При этом четко разграничиваются мероприятия,
которые должны выполняться сотрудниками администрации в пределах штатного
расписания, и мероприятия, для выполнения которых используется специальный
бюджет, из которого оплачивается выполнение мероприятий. Распределение
мероприятий на основные и дополнительные проводится НТС.
Достоинствами предложенной схемы
управления являются:
1. Высокая контролируемость,
координируемость и управляемость СУЭБ за счет:
• введения администраторов,
занимающихся оперативным управлением;
• использования централизованной
информационной системы.
2. Высокое качество оценки
выполненных мероприятий за счет привлечения экспертов и участников НТС.
3. Возможность привлечения к
выполнению мероприятий высококвалифицированных специалистов за счет возможности
финансирования.
4. Повышение заинтересованности в
успешном выполнении мероприятий как у руководителей, так и у исполнителей за
счет возможности финансирования.
5. Возможность оперативного внесения
изменений в комплекс мероприятий за счет использования централизованной
информационной системы.
6. Сокращение времени сбора отчетной
и текущей информации за счет использования информационной системы.
Заключение
Для обеспечения энергетической
безопасности в РФ необходимо решение первоочередных проблем.
1. Должна быть сформирована система
объективных показателей (индикаторов) энергетической безопасности. Для этого
необходимо собрать и проанализировать состояние защищенности жизненно важных
интересов населения, предприятий, муниципальных образований и субъекта РФ в
целом в настоящее время и в прогнозируемой перспективе. На основе этого анализа
формируется перечень показателей с указанием степени их значимости и связанных
с ними угроз.
2. Необходимо осуществить
модернизацию во многом устаревшей морально и изношенной физически
технологической базы ТЭК и обеспечить воспроизводство его вырабатываемой
ресурсной базы – обычно в новых регионах и худших природно-геологических
условиях. Предусматривается, что в текущем десятилетии ввиду ограниченности
инвестиций (кроме нефтяной отрасли) технологическая модернизация будет
происходить в первую очередь на существующих производственных мощностях (с
учетом продления сроков их службы), а в дальнейшем – путём их коренной
реконструкции и создания новых мощностей с использованием лучших отечественных
и соответствующих нашим условиям зарубежных технологий[13].
3. Потребуется изменение структуры
потребления и размещения производства топливно-энергетических ресурсов.
Предусмотрено увеличение потребления атомной и гидроэнергии, угля и
возобновляемых источников, а также рассредоточение добычи углеводородов из
Западной Сибири по другим регионам страны.
4. Важнейшим условием обеспечения
энергетической безопасности и сбалансированного развития ТЭК необходимо
единство целей и методов государственной энергетической политики на федеральном
и региональном уровнях. В соответствии с законодательством предусматривается
следующее разграничение порядка управления энергетикой в центре и на местах.
Федеральные государственные органы
разрабатывают нормативно-правовую базу, в том числе законодательную основу
функционирования ТЭК и взаимоотношений в обществе в сфере топлива и энергии, в
директивном порядке осуществляют координацию и контроль за деятельностью
федеральных энергетических систем и атомной энергетики; управляют
стратегическими запасами энергетических ресурсов; устанавливают технические
регламенты, стандарты и нормативы безопасности и эффективности работы
энергетических объектов и установок, организацию государственного надзора за их
соблюдением; ведут лицензирование месторождений полезных ископаемых и деятельности
субъектов ТЭК; регулируют деятельность естественных монополий на основе
законодательной и нормативной базы, а также путем владения акциями компаний и
акционерных обществ.
Для своевременной и адекватной
реакции государства на возникающие угрозы энергетической безопасности, анализа
состояния безопасности регионов России, на этапе реализации Энергетической
стратегии предусматриваются разработка и реализация системы оперативных и
долгосрочных мер по предупреждению и нейтрализации внутренних и внешних угроз,
использование критериев (индикаторов) такой безопасности, создание системы ее
мониторинга и механизмов, позволяющих стабилизировать ситуацию.
Список использованных источников
2.
Энергетическая
безопасность России. В. В. Бушуев, Н. И. Воропай, А. М. Масцепанов, Ю. К.
Шафраник и др. Новосибирск, Сибирская издательская
фирма “Наука”, 302 с.
3.
Центральная база
статистических данных #”#_ftnref1″ name=”_ftn1″ title=””>[1] Энергетическая
безопасность #”#_ftnref2″ name=”_ftn2″ title=””>[2] Энергетическая
безопасность #”#_ftnref3″ name=”_ftn3″ title=””>[3] Энергетическая
безопасность России. В. В. Бушуев, Н. И. Воропай, А. М. Масцепанов, Ю. К. Шафраник
и др. Новосибирск, Сибирская издательская фирма “Наука”
[4] Энергетическая
безопасность и проблемы ее обеспечения
#”#_ftnref5″ name=”_ftn5″ title=””>[5] Энергетическая
эффективность. Состав показателей #”#_ftnref6″ name=”_ftn6″ title=””>[6] Центральная
база статистических данных #”#_ftnref7″ name=”_ftn7″ title=””>[7] Государственная
энергетическая политика #”#_ftnref8″ name=”_ftn8″ title=””>[8] Анализ
энергоэффективности экономики и развития электроэнергетики России
#”#_ftnref9″ name=”_ftn9″ title=””>[9] Угроза
энергетической безопасности #”#_ftnref10″ name=”_ftn10″ title=””>[10] Мастепанов
А.М. Топливно-энергетический комплекс России на рубеже веков – состояние,
проблемы и перспективы развития / Справочно-аналитический сборник. – М.: ГУ
ИЭС, 2008.
[11] Энергетическая
безопасность России. В. В. Бушуев, Н. И. Воропай, А. М. Масцепанов, Ю. К.
Шафраник и др. Новосибирск, Сибирская издательская фирма “Наука”
[12] Энергетическая
безопасность России. В. В. Бушуев, Н. И. Воропай, А. М. Масцепанов, Ю. К.
Шафраник и др. Новосибирск, Сибирская издательская фирма “Наука”
[13] Энергетическая
стратегия России на период до 2020 года http://www.minprom.gov.ru/docs/strateg/1





