
. Информатика, ВТ, телекоммуникации. 2013-10-23")
Усилитель импульсный. курсовая работа (т). информатика, вт, телекоммуникации. 2021-10-23
Министерство
образования и науки Российской Федерации
Федеральное
государственное бюджетное образовательное учреждение высшего профессионального
образования
ТОМСКИЙ
ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР)
Кафедра
радиоэлектроники и защиты информации (РЗИ)
Пояснительная
записка к курсовому проекту
по
дисциплине «Схемотехника аналоговых электронных устройств»
УСИЛИТЕЛЬ
ИМПУЛЬСНЫЙ
Выполнил: А.В. Черепанов
Руководитель работы: А.А. Титов
Реферат
Объектом исследования в данном курсовом проекте
являются методы расчета усилительных каскадов на основе транзисторов.
Цель работы – приобрести практические навыки в
расчете усилительных каскадов на примере решения конкретной задачи.
В процессе работы производился расчет различных
элементов импульсного усилителя.
Пояснительная записка выполнена в текстовом
редакторе Microsoft Word 2007.
Техническое задание
. Сопротивление источника сигнала и
нагрузки Rг=75 Ом.
. Сквозной коэффициент усиления ku=30дБ.
. Длительность усиливаемых импульсов Ти=4
мкс.
. Скважность усиливаемых импульсов Q=100.
. Время установления фронта импульсов tу=7нс.
. Спад вершины импульсов на выходе Δ=20%
. Полярность усиливаемых
импульсовотрицательная.
. Полярность импульсов на выходе
отрицательная.
. Максимальная амплитуда импульсов на
выходе Uвых=6 В.
Содержание
Введение
.
Расчетная часть
.1
Структурная схема усилителя
.2
Расчет выходного каскада
.2.1
Выбор рабочей точки
.2.2
Выбор транзистора
.2.3
Расчет эквивалентной схемы транзистора
.2.4
Расчёт цепей термостабилизации
.2.4.1
Эмиттерная термостабилизация
.3
Расчет входного каскада
.3.1
Выбор рабочей точки
.3.3
Расчет эквивалентной схемы транзистора
.3.4
Расчёт цепей термостабилизации
.4
Расчёт разделительных и блокировочных емкостей
Заключение
Список
использованных источников
Приложение
Введение
В настоящее время наблюдается стремительный рост
приборов, работающих не с аналоговыми сигналами, а именно с импульсными.
Преобладающее применение импульсных устройств обусловлено их высоким КПД, более
высокой точностью, меньшей критичностью к изменению температуры, большей
помехоустойчивостью. В связи с этим особо актуальной становится задача
разработки импульсных усилителей, способствующих более полному восприятию
поступающей в импульсной форме информации.
Целью данного курсового проекта являлся расчет
импульсного усилителя.
1. Расчетная часть
.1 Структурная
схема усилителя
Для обеспечения требуемого коэффициента усиления
равного 30 дБ и одинаковой полярности сигнала на входе и выходе примем число каскадов
усилителя равное 2, каждый каскад вносит свой вклад в усиление. Также входной
отвечает за обеспечение одинаковой полярности входного и выходного сигналов.
Структурная схема усилителя, приведенная на
рисунке 2.1, содержит кроме усилительных каскадов источник сигнала и нагрузку.
Рисунок 2.1 – Структурная схема усилителя
1.2 Расчет
выходного каскада
.2.1 Выбор рабочей
точки
Рассчитаем рабочую точку двумя способами:
. При использовании активного
сопротивления Rк в цепи коллектора.
. При использовании дросселя в цепи
коллектора.
. Рассчитаем рабочую точку при использовании
активного сопротивления Rк в цепи коллектора [2].
Рисунок 2.2 – Каскад с активным
сопротивлением ![]() в цепи
в цепи
коллектора.
Расчеты производятся при условии,
что:
![]() ,
, ![]() ;
;
 ;
;
 ;(2.2.1)
;(2.2.1)
![]() ;
;
![]() ;
;
Рассчитаем ток рабочей точки:
 ;(2.2.2)
;(2.2.2)
Для ИУ однополярных сигналов с
большой скважностью:
 ;(2.2.3)
;(2.2.3)
Постоянная мощность, рассеиваемая на
коллекторе:
Мощность, рассеиваемая на ![]() :
:
![]() ;(2.2.5)
;(2.2.5)
Требуемое значение напряжения
источника питания ![]() для
для
рассмотренных выше случаев равно:
![]() ;(2.2.6)
;(2.2.6)
Потребляемая мощность:
![]() ;(2.2.7)
;(2.2.7)
Выходная мощность:
![]() ;(2.2.8)
;(2.2.8)
Коэффициент полезного действия:
 ;(2.2.9)
;(2.2.9)
Пусть![]() ,
, ![]() .
.
Найдем ![]() по формуле
по формуле
(2.2.1):
 .
.
Рассчитаем рабочую точку по формулам
(2.2.2) и (2.2.3):
 ;
;
Т.к. ![]() оказываются значительно меньше
оказываются значительно меньше
аналогичных справочных значений для маломощных транзисторов, то положим ![]() .
.
 ;
;
Определим ![]() по (2.2.6):
по (2.2.6):
![]() ;
;
Найдём потребляемую мощность,
мощность, рассеиваемую на коллекторе, выходную мощность и мощность,
рассеиваемая на Rк по формулам (2.2.7), (2.2.4), (2.2.8) и (2.2.5)
соответственно:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Из формулы (2.2.9) находим КПД:
 .
.
. Рассчитаем рабочую точку при
использовании дросселя ![]() в цепи
в цепи
коллектора [2].
Рисунок 2.3 – Каскад с дросселем ![]() в цепи
в цепи
коллектора.
Пусть![]() ,
, ![]()
![]() , т.к. сопротивление дросселя по
, т.к. сопротивление дросселя по
переменному току ![]() .
.
Рассчитаем рабочую точку по формулам
(2.2.2) и (2.2.3):
 .
.
Т.к. ![]() оказываются значительно меньше
оказываются значительно меньше
аналогичных справочных значений для маломощных транзисторов, то положим ![]() .
.
![]() ;
;
Найдем Еп по формуле (2.2.6) с
учетом того, что сопротивление дросселя по постоянному току ![]() :
:
![]() .
.
Найдём потребляемую мощность,
мощность, рассеиваемую на коллекторе и выходную мощность (2.2.7), (2.2.4) и
(2.2.8) соответственно:
![]() ;
;
![]() ;
;
![]() .
.
Из формулы (2.2.9) находим КПД:
 .
.
Результаты выбора рабочей точки
двумя способами приведены в таблице 2.1.
Таблица 2.1 – Результаты расчетов рабочей точки
двумя способами
Каскад |
| ||||||
Резистивный | 5,4 | 5 | 0,005 | 0,027 | 0,015 | 37,5 | 56 |
Дроссельный | 5,4 | 5 | 0,005 | 0,027 | 0,015 | 75 | 56 |
Для данного курсового задания выберем
резистивный каскад.
1.2.2 Выбор
транзистора
Выбор транзистора для оконечного каскада
осуществляется с учетом следующих предельных параметров [2]:
![]() ;
;
![]() ;
;
![]() ;
;
 ,
,
 .
.
Этим требованиям полностью
соответствует транзистор 2T607A-4.
Его основные технические
характеристики приведены ниже [3].
Электрические параметры:
Граничная частота коэффициента
передачи тока в схеме с ОЭ ![]() ;
;
Постоянная времени цепи обратной
связи![]() при
при ![]() ;
;
Статический коэффициент передачи
тока в схеме с ОЭ![]() ;
;
Ёмкость коллекторного перехода ![]() при
при ![]() .
.
Предельные эксплуатационные данные:
Постоянное напряжение коллектор-эмиттер
![]() ;
;
Постоянный ток коллектора ![]() ;
;
Постоянная рассеиваемая мощность
коллектора ![]() .
.
1.2.3 Расчет эквивалентной схемы
транзистора
Многочисленные исследования показывают, что даже
на умеренно высоких частотах транзистор не является безынерционным прибором.
Свойства транзистора при малом сигнале в широком диапазоне частот удобно
анализировать при помощи физических эквивалентных схем. Наиболее полные из них
строятся на базе длинных линий и включают в себя ряд элементов с
сосредоточенными параметрами. Наиболее распространенная эквивалентная схема –
схема Джиаколетто, которая представлена на рисунке 2.4 [1].
Рисунок 2.4 – Эквивалентная схема Джиаколетто
Значения элементов схемы Джиаколетто могут быть
рассчитаны по паспортным данным транзистора по следующим формулам:
 (2.2.10)
(2.2.10)
где U¢кэо
– справочное или паспортное значение напряжения;
Uкэо
– требуемое значение напряжения.
 ;(2.2.11)
;(2.2.11)
 ;(2.2.12)
;(2.2.12)
 ;(2.2.13)
;(2.2.13)
 ;(2.2.14)
;(2.2.14)
 ;(2.2.15)
;(2.2.15)
 ;(2.2.16)
;(2.2.16)
 ;(2.2.17)
;(2.2.17)
где ![]() – ток эмиттера в рабочей точке в
– ток эмиттера в рабочей точке в
миллиамперах;
![]() .
.
Получим следующие значения:
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 .
.
Перейдем к однонаправленной модели.
Схема однонаправленной модели
транзистора приведена на рисунке 2.5.
Рисунок 2.5 – Однонаправленная
модель
Значения элементов схемы замещения,
приведенной на рисунке 2.5, могут быть рассчитаны по следующим формулам:
 ;(2.2.18)
;(2.2.18)
 .(2.2.19)
.(2.2.19)
Расчет некорректированного каскада:
 ;(2.2.20)
;(2.2.20)
![]() ;(2.2.21)
;(2.2.21)
![]() ;(2.2.22)
;(2.2.22)
![]() ;
;
 ;(2.2.23)
;(2.2.23)
![]() .(2.2.24)
.(2.2.24)
Подставив соответствующие значения
параметров элементов, получим:
 ;
;
 ;
;
 ;
;
Расчет некорректированного каскада:
 ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
 ;
;
![]() .
.
Видно, что время установления
получилось небольшим, следовательно, выходной каскад можно использовать без
какой-либо коррекции.
1.2.4 Расчёт цепи
термостабилизации
Существует несколько вариантов схем
термостабилизации. Их использование зависит от мощности каскада и от того,
насколько жёсткие требования к термостабильности. В данной работе рассмотрим
эмиттерную термостабилизацию.
1.2.4.1 Эмиттерная
термостабилизация
Рисунок 2.6 – Схема эмиттерной термостабилизации
Выбираем падение напряжения на
резисторе ![]() из условия
из условия ![]() (пусть
(пусть ![]() ), также Uбэ0 примем за
), также Uбэ0 примем за
0,7(В) затем производим следующий расчёт:
импульсный усилитель транзистор эмиттерный
 ;(2.2.25)
;(2.2.25)
![]() ;(2.2.26)
;(2.2.26)
![]() ;(2.2.27)
;(2.2.27)
 ;(2.2.28)
;(2.2.28)
![]() ;(2.2.29)
;(2.2.29)
 ;(2.2.30)
;(2.2.30)
 ;(2.2.31)
;(2.2.31)
![]() .(2.2.32)
.(2.2.32)
В результате расчетов получим:
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
 ;
;
 ;
;
![]() .
.
1.3 Расчет входного каскада
Входной каскад будем рассчитывать на
2Т608А с использованием резистивного каскада.
Электрические параметры [3]:
Граничная частота коэффициента
передачи тока в схеме с ОЭ ![]() ;
;
Постоянная времени цепи обратной
связи![]() при
при ![]() ;
;
Статический коэффициент передачи тока
в схеме с ОЭ![]() ;
;
Ёмкость коллекторного перехода ![]() при
при ![]() .
.
Предельные эксплуатационные данные:
Постоянное напряжение
коллектор-эмиттер ![]() ;
;
Постоянный ток коллектора ![]() ;
;
Постоянная рассеиваемая мощность
коллектора ![]() .
.
1.3.1 Выбор рабочей точки
Оценим значение ![]() входного
входного
каскада:
 ,
,
где ![]() – выходное напряжение следующего
– выходное напряжение следующего
каскада;
![]() – коэффициент усиления следующего
– коэффициент усиления следующего
каскада.
Нагрузкой входного каскада являются
входное сопротивление ![]() и входная
и входная
динамическая емкость ![]() следующего
следующего
каскада.
Рассчитаем рабочую точку по формулам
(2.2.1) – (2.2.3), учитывая, что ![]() ,
, ![]()
![]() .
.
 ;
;
 ;
;
 .
.
Т.к. ![]() и
и ![]() оказываются значительно меньше
оказываются значительно меньше
аналогичных справочных значений для маломощных транзисторов, то положим ![]() , а
, а ![]() .
.
1.3.3 Расчет
эквивалентной схемы транзистора
Рассчитаем элементы эквивалентной схемы
транзистора по формулам (2.2.10) – (2.2.17).
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
 ;
;
![]() ;
;
![]() ;
;
 .
.
По формуле (2.2.18) рассчитаем
входную проводимость транзистора:
 ;
;
![]() ;
;
![]() ;
;
 ;
;
 ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
 ;
;
![]()

Сквозной коэффициент усиления
каскада будет равным 31 дБ.
1.3.4 Расчёт цепей термостабилизации
Будем применять эмиттерную
термостабилизацию.
Пусть ![]() . Выбираем падение напряжения на резисторе
. Выбираем падение напряжения на резисторе
![]() из условия
из условия ![]() (пусть
(пусть ![]() ), затем
), затем
произведем следующий расчёт по формулам (2.2.25) – (2.2.32).
 ;
;
![]() ;
;
![]() ;
;
 ;
;
![]() ;
;
 ;
;
![]() .
.
1.4 Расчёт разделительных и
блокировочных емкостей
Рассчитаем разделительные емкости
[2]:
 ,
,
где![]() – сопротивление предыдущего каскада,
– сопротивление предыдущего каскада,
![]() – сопротивление следующего каскада,
– сопротивление следующего каскада,
![]() – кол-во разделительных
– кол-во разделительных
конденсаторов.
 ;
;
 ;
;
 .
.
Для расчета емкости эмиттера воспользуемся
формулой (“*” обозначаются элементы с выходного каскада):
 ;
;
 .
.
Заключение
В данном курсовом проекте был разработан
импульсный усилитель с характеристиками указанным в техническом задании.
Выходной каскад обеспечивает требуемое выходное напряжение, а также вместе с
входным обеспечивает необходимое усиление.
. Сопротивление источника сигнала и
нагрузки Rг=75 Ом.
. Сквозной коэффициент усиления ku=31дБ.
. Длительность усиливаемых импульсов Ти=4
мкс.
. Скважность усиливаемых импульсов Q=100.
. Время установления фронта импульсов tу=6,9нс.
. Спад вершины импульсов на выходе Δ=20%
. Полярность усиливаемых импульсовотрицательная.
. Полярность импульсов на выходе
отрицательная.
. Максимальная амплитуда импульсов на
выходе Uвых=6 В.
Усилитель имеет небольшой запас по усилению .
Это необходимо для того, чтобы в случае ухудшения усилительных свойств
коэффициент передачи усилителя не опускался ниже заданного уровня,
определённого техническим заданием.
Проверка рассчитанной схемы была выполнена в
программе Multisim.
Спроектированный усилитель удовлетворяет всем
требованиям, указанным в задании, что говорит о правильности проделанной
работы.
Список
использованных источников
. Титов А.А. Расчёт элементов высокочастотной
коррекции усилительных каскадов на биполярных транзисторах: учебно-методическое
пособие. – Томск: ТУСУР, 2002. – 45 стр.
. Красько А.С., Проектирование аналоговых
устройств: методические указания. – Томск: ТУСУР, 2000 – 28 стр.
. Полупроводниковые приборы: транзисторы.
Справочник Под ред. Горюнова Н.Н. -М.: Энергоатомиздат, 1985 – 903стр.
Приложение
Принципиальная схема
Таблица
Наименование | Кол-во | Примечание | ||
VT1 | 2T607A-4 | 1 | ||
VT2 | 2Т608А | 1 | ||
Конденсаторы | ||||
C1 | CC0603JRNPO9BN270 | 1 | ||
C2 | GRM1885C1H150JA01D | 1 | ||
C3 | GRM188F51H473ZA01D | 1 | ||
C4 | CC0805ZKY5V6BB106 | 1 | ||
C5 | CC0805ZKY5V6BB106 | |||
Резисторы | ||||
R1 | RC0603JR-073K9 | 1 | ||
R2 | RC0603JR-072K2- | 1 | ||
R3 | RC0805JR-0751R | 1 | ||
R4 | CRCW0402715RFKED | 1 | ||
R5 | CRCW040215K0JN- | 1 | ||
R6 | RC0805JR-078K2 | 1 | ||
R7 | RC0805JR-0768R | 1 | ||
R8 | RC0603JR-07680R | 1 | ||
Электродвижущая сила и электромагнитный момент машины постоянного тока — киберпедия
Электродвижущая сила. Она наводится в обмотке якоря основным магнитным потоком. Для получения выражения этого потока обратимся к графику распределения индукции в зазоре машины (в поперечном сечении), который при равномерном зазоре в пределах каждого полюса имеет вид криволинейной трапеции (рис. 25.14, а, график 1). Заменим действительное распределение индукции в зазоре прямоугольным (график 2), при этом высоту прямоугольника примем равной максимальному значению индукции  , а ширину — равной величине
, а ширину — равной величине  , при которой площадь прямоугольника равна площади, ограниченной криволинейной трапецией. Величина называется расчетной полюсной дугой. В машинах постоянного тока расчетная полюсная дуга мало отличается от полюсной дуги
, при которой площадь прямоугольника равна площади, ограниченной криволинейной трапецией. Величина называется расчетной полюсной дугой. В машинах постоянного тока расчетная полюсная дуга мало отличается от полюсной дуги  :
:
 , (25.13)
, (25.13)
или, воспользовавшись коэффициентом полюсного перекрытия  , получим
, получим
 (25.14)
(25.14)
С учетом (25.14) основной магнитный поток (Вб)
 (25.15)
(25.15)
Здесь  — полюсное деление, мм;
— полюсное деление, мм;  — расчетная длина якоря, мм.
— расчетная длина якоря, мм.

Рис. 25.14. Распределение магнитной индукции
в воздушном зазоре машины постоянного тока
Коэффициент полюсного перекрытия  имеет большое влияние на свойства машины постоянного тока. На первый взгляд кажется целесообразным выбрать наибольшее значение
имеет большое влияние на свойства машины постоянного тока. На первый взгляд кажется целесообразным выбрать наибольшее значение  , так как это способствует увеличению потока Ф, а следовательно, и увеличению мощности машины (при заданных размерах). Однако слишком большое , приведет к сближению полюсных наконечников полюсов, что будет способствовать росту магнитного потока рассеяния и неблагоприятно отразится на других свойствах машины. При этом полезный поток машины может оказаться даже меньше предполагаемого значения (см. § 26.1). Обычно = 0,6÷0,8, при этом меньшие значения соответствуют машинам малой мощности.
, так как это способствует увеличению потока Ф, а следовательно, и увеличению мощности машины (при заданных размерах). Однако слишком большое , приведет к сближению полюсных наконечников полюсов, что будет способствовать росту магнитного потока рассеяния и неблагоприятно отразится на других свойствах машины. При этом полезный поток машины может оказаться даже меньше предполагаемого значения (см. § 26.1). Обычно = 0,6÷0,8, при этом меньшие значения соответствуют машинам малой мощности.
На рис. 25.14, б показан продольный разрез главного полюса и якоря с радиальными вентиляционными каналами. График распределения магнитной индукции в воздушном зазоре по продольному разрезу машины имеет вид зубчатой кривой (кривая 1). Заменим эту кривую прямоугольником высотой  и основанием , величина которого такова, что площадь прямоугольника равна площади, ограниченной зубчатой кривой. Это основание представляет собой расчетную длину якоря (мм)
и основанием , величина которого такова, что площадь прямоугольника равна площади, ограниченной зубчатой кривой. Это основание представляет собой расчетную длину якоря (мм)
 , (25.16)
, (25.16)
где  — длина полюса, мм;
— длина полюса, мм;
 (25.17)
(25.17)
— длина якоря без радиальных вентиляционных каналов, мм;  — общая длина якоря, включая вентиляционные каналы, мм;
— общая длина якоря, включая вентиляционные каналы, мм;  — ширина вентиляционного канала (обычно 10 мм), мм.
— ширина вентиляционного канала (обычно 10 мм), мм.
При выводе формулы ЭДС будем исходить из прямоугольного закона распределения индукции в зазоре, при этом магнитная индукция на участке расчетной полюсной дуги  равна
равна  , а за ее пределами равна нулю и в проводниках, расположенных за пределами , ЭДС не наводится. Это эквивалентно уменьшению общего числа пазовых проводников в обмотке якоря до значения
, а за ее пределами равна нулю и в проводниках, расположенных за пределами , ЭДС не наводится. Это эквивалентно уменьшению общего числа пазовых проводников в обмотке якоря до значения  . Исходя из этого и учитывая, что ЭДС обмотки определяем с суммой ЭДС секций, входящих лишь в одну параллельную ветвь с числом пазовых проводников
. Исходя из этого и учитывая, что ЭДС обмотки определяем с суммой ЭДС секций, входящих лишь в одну параллельную ветвь с числом пазовых проводников  , запишем
, запишем
 , (25.18)
, (25.18)
где
 (25.19)
(25.19)
— ЭДС одного пазового проводника обмотки, активная длина которого .
Окружную скорость вращающегося якоря (м/с) заменим частотой вращения (об/мин):  , где
, где  .
.
С учетом (25.18), (25.19) получим

или, учитывая, что произведение  , получим выражение ЭДС машины постоянного тока (В):
, получим выражение ЭДС машины постоянного тока (В):
 , (25.20)
, (25.20)
где  (25.21)
(25.21)
— постоянная для данной машины величина; Ф — основной магнитный поток, Вб;  — частота вращения якоря, об/мин.
— частота вращения якоря, об/мин.
Значение ЭДС обмотки якоря зависит от ширины секции  . Наибольшее значение ЭДС соответствует полному (диаметральному) шагу
. Наибольшее значение ЭДС соответствует полному (диаметральному) шагу  , так как в этом случае с каждой секцией обмотки сцепляется весь основной магнитный поток Ф. Если же секция укорочена (у <
, так как в этом случае с каждой секцией обмотки сцепляется весь основной магнитный поток Ф. Если же секция укорочена (у <  ), то каждая секция сцепляется лишь с частью основного потока, а поэтому ЭДС обмотки якоря уменьшается. Таков же эффект при удлиненном шаге секций (у >
), то каждая секция сцепляется лишь с частью основного потока, а поэтому ЭДС обмотки якоря уменьшается. Таков же эффект при удлиненном шаге секций (у >  ), так как в этом случае каждая секция обмотки сцепляется с основным потоком одной пары полюсов и частично с потоком соседней пары, имеющим противоположное направление, так что результирующий поток, сцепленный с каждой секцией, становится меньше потока одной пары полюсов. По этой причине в машинах постоянного тока практическое применение получили секции с полным или укороченным шагом.
), так как в этом случае каждая секция обмотки сцепляется с основным потоком одной пары полюсов и частично с потоком соседней пары, имеющим противоположное направление, так что результирующий поток, сцепленный с каждой секцией, становится меньше потока одной пары полюсов. По этой причине в машинах постоянного тока практическое применение получили секции с полным или укороченным шагом.
На ЭДС машины влияет положение щеток: при нахождении щеток на геометрической нейтрали ЭДС наибольшая, так как в этом случае в каждой параллельной ветви обмотки все секции имеют одинаковое направление ЭДС; если же щетки сместить с нейтрали, то в параллельных ветвях окажутся секции с противоположным направлением ЭДС, в результате ЭДС обмотки якоря будет уменьшена.
При достаточно большом числе коллекторных пластин уменьшения ЭДС машины при сдвиге щеток с нейтрали учитывается множителем  :
:
 , (25.22)
, (25.22)
где  — угол смещения оси щеток относительно нейтрали (рис. 25. 15).
— угол смещения оси щеток относительно нейтрали (рис. 25. 15).

Рис. 25.15. Наведение ЭДС в обмотке якоря при сдвиге
щеток с геометрической нейтрали на угол 
Электромагнитный момент. При прохождении по пазовым проводникам обмотки якоря тока  на каждом из проводников появляется электромагнитная сила
на каждом из проводников появляется электромагнитная сила
 . (25.23)
. (25.23)
Совокупность всех электромагнитных сил  на якоре, действующих на плечо, равное радиусу сердечника якоря
на якоре, действующих на плечо, равное радиусу сердечника якоря  , создает на якоре электромагнитный момент М.
, создает на якоре электромагнитный момент М.
Исходя из прямоугольного закона распределения магнитной индукции в зазоре (см. рис. 25.14, а, график 2), следует считать, что сила одновременно действует на число пазовых проводников  . Следовательно, электромагнитный момент машины постоянного тока (Н∙м)
. Следовательно, электромагнитный момент машины постоянного тока (Н∙м)

Учитывая, что  , а также что ток параллельной ветви
, а также что ток параллельной ветви  , получим
, получим
 .
.
Используя выражение основного магнитного потока (25.15), а также имея в виду, что  , получим выражение электромагнитного момента (Н·м):
, получим выражение электромагнитного момента (Н·м):
 , (25.24)
, (25.24)
где  — ток якоря, А;
— ток якоря, А;
 (25.25)
(25.25)
— величина, постоянная для данной машины.
Электромагнитный момент машины при ее работе в двигательном режиме является вращающим, а при генераторном режиме — тормозящим по отношению к вращающему моменту приводного двигателя.
Подставив из (25.20) в (25.24) выражение основного магнитного потока  , получим еще одно выражение электромагнитного момента:
, получим еще одно выражение электромагнитного момента:
 , (25.26)
, (25.26)
где  — угловая скорость вращения;
— угловая скорость вращения;
 (25.27)
(25.27)
— электромагнитная мощность машины постоянного тока, Вт.
Из (25.26) следует, что в машинах равной мощности электромагнитный момент больше у машины с меньшей частотой вращения якоря.
Выбор типа обмотки якоря
Применение в машине постоянного тока того или иного типа обмотки якоря определяется технико-экономическими требованиями. Выбранный тип обмотки должен обеспечивать в машине необходимую ЭДС при заданном токе. При этом следует стремиться к минимальному числу уравнительных соединений. Требования экономического характера при выборе типа обмотки сводятся к возможно лучшему использованию пазов сердечника якоря, что определяется значением коэффициента заполнения паза медью [см. (8.4)].
Выбранный тип обмотки должен содержать возможно меньшее число пазовых проводников N, так как в противном случае значительная часть площади паза будет занята изоляцией этих проводников. Преобразуя выражения (25.20), получим
 . (25.28)
. (25.28)
Отсюда следует, что при заданных  и
и  число проводников в обмотке прямо пропорционально числу пар параллельных ветвей. Поэтому при выборе типа обмотки следует отдавать предпочтение обмоткам якоря с минимальным числом параллельных ветвей, например, простой волновой обмотке с 2
число проводников в обмотке прямо пропорционально числу пар параллельных ветвей. Поэтому при выборе типа обмотки следует отдавать предпочтение обмоткам якоря с минимальным числом параллельных ветвей, например, простой волновой обмотке с 2 = 2, которая к тому же не требует уравнительных соединений. В табл. 25.1 приведены рекомендации по выбору типа обмотки якоря для двигателей постоянного тока общепромышленного назначения в зависимости от числа полюсов и силы тока якоря.
= 2, которая к тому же не требует уравнительных соединений. В табл. 25.1 приведены рекомендации по выбору типа обмотки якоря для двигателей постоянного тока общепромышленного назначения в зависимости от числа полюсов и силы тока якоря.
Таблица 25.1
К условиям, ограничивающим применение простой волновой обмотки, следует отнести в первую очередь предельно допустимое значение тока в параллельной ветви (300—400 А) и среднее значение напряжения между смежными коллекторными пластинами  , которое не должно превышать (В):
, которое не должно превышать (В):
| Машины мощностью до 1 кВт | 25—30 |
| Машины мощностью более 1 кВт без компенсационной обмотки | 16 |
| Машины с компенсационной обмоткой | 20 |
Указанные предельные значения  распространяются и на обмотки якоря других типов. При превышении указанных пределов появляется вероятность возникновения в машине опасного явления, называемого круговым огнем (см. § 27.4).
распространяются и на обмотки якоря других типов. При превышении указанных пределов появляется вероятность возникновения в машине опасного явления, называемого круговым огнем (см. § 27.4).
Контрольные вопросы
1. В чем принципиальное отличие обмоток якоря от обмоток статора бесколлекторных машин переменного тока?
2. Какими параметрами характеризуется обмотка якоря?
3. Сколько параллельных ветвей имеет обмотка якоря шестиполюсной машины в случаях простой петлевой и простой волновой обмоток?
4. Во сколько раз изменится ЭДС обмотки якоря шестиполюсной машины, если простую волновую обмотку заменить простой петлевой при том же числе секций?
5. Что такое магнитная несимметрия и каковы ее последствия?
6. В каких обмотках якоря применяют уравнители первого и второго рода?
7. Каковы достоинства комбинированной обмотки?
8. Как влияют ширина секции и положение щеток на ЭДС машины?
9. Какими соображениями руководствуются при выборе типа обмотки якоря?
Глава 26
§
Магнитная система машины постоянного тока состоит из станины (ярма), сердечников главных полюсов с полюсными наконечниками, воздушного зазора и сердечника якоря.
На рис. 26.1 показана картина магнитного поля четырехполюсной машины. При этом имеется в виду машина, работающая в режиме х.х., когда МДС создается лишь обмоткой возбуждения, а в обмотке якоря и обмотке добавочных полюсов тока нет или он настолько мал, что его влиянием на картину магнитного поля можно пренебречь. В целях упрощения на рисунке не показаны добавочные полюсы, так как в режиме х.х. их влияние на картину магнитного поля машины незначительно. Как это следует из рис. 26.1, магнитный поток главных полюсов состоит из двух неравных частей: большая часть образует основной магнитный поток  , а меньшая — магнитный поток рассеяния полюсов
, а меньшая — магнитный поток рассеяния полюсов  . Поток рассеяния учитывается коэффициентом рассеяния
. Поток рассеяния учитывается коэффициентом рассеяния  (см. § 20.1).
(см. § 20.1).
Магнитодвижущая сила обмотки возбуждения на пару полюсов в режиме х.х. определяется суммой магнитных напряжений на участках магнитной цепи (рис. 26.2):
 , (26.1)
, (26.1)
где  — магнитные напряжения воздушного зазора, зубцового слоя якоря, главного полюса, спинки якоря, станины (ярма) соответственно.
— магнитные напряжения воздушного зазора, зубцового слоя якоря, главного полюса, спинки якоря, станины (ярма) соответственно.
Если машина имеет компенсационную обмотку (см. § 26.4), то в (26.1) следует ввести еще одно слагаемое  , представляющее собой магнитное напряжение зубцового слоя главного полюса.
, представляющее собой магнитное напряжение зубцового слоя главного полюса.
Порядок расчета магнитных напряжений на участках магнитной цепи машины постоянного тока в принципе такой же, что и в случае асинхронной машины (см. гл. 11). При этом расчет магнитных напряжений станины и сердечника главного полюса ведут по магнитному потоку главного полюса  , который больше основного потока на значение потока рассеяния
, который больше основного потока на значение потока рассеяния  :
:

где  — коэффициент магнитного рассеяния.
— коэффициент магнитного рассеяния.

Рис. 26.1. Магнитное поле машины постоянного тока в режиме х.х.
При заданном значении ЭДС машины  определяют требуемое значение основного магнитного потока (Вб) [см. (25.20)]:
определяют требуемое значение основного магнитного потока (Вб) [см. (25.20)]:
 . (26.2)
. (26.2)
Далее рассчитывают магнитную индукцию для каждого участка магнитной цепи:
 , (26.3)
, (26.3)
где  — магнитный поток на данном участке магнитной цепи. Вб;
— магнитный поток на данном участке магнитной цепи. Вб;
 — площадь поперечного сечении этого участка, м2.
— площадь поперечного сечении этого участка, м2.

Рис. 26.2. Расчетный участок магнитной цепи
четырехполюсной машины постоянного тока
По таблицам или кривым намагничивания для соответствующих ферромагнитных материалов находят напряженность магнитного поля на участках магнитной цепи  ,а затем определяют магнитное напряжение (А)
,а затем определяют магнитное напряжение (А)

и МДС обмотки возбуждения на пару полюсов по (26.1).
Значения магнитных напряжений для различных участком магнитной цепи неодинаковы и зависят от магнитных сопротивлений этих участков. Наибольшим магнитным сопротивлением обладает воздушный зазор, поэтому магнитное напряжение  намного больше любого из слагаемых выражения (26.1).
намного больше любого из слагаемых выражения (26.1).
Другие участки магнитной цепи выполняют из ферромагнитных материалов. В машинах постоянного тока для изготовления различных элементов магнитной цепи применяют следующие материалы.
Сердечник якоря — тонколистовые электротехнические стали марок 2021, 2312 и 2411 толщиной 0,5 мм (см. табл. 11.1).
Сердечник главного полюса — листовая анизотропная (холоднокатаная) сталь марки 3411 толщиной 1 мм, пластины не изолируют.
Станина — в машинах малой мощности станину изготовляют из стальных цельнотянутых труб, а для машин средней и большой мощности станины делают, сварными из листовой конструкционной стали марки СтЗ.
Магнитное напряжение воздушного зазора (А)
 , (26.4)
, (26.4)
где  — величина воздушного зазора, мм;
— величина воздушного зазора, мм;  — коэффициент воздушного зазора, учитывающий увеличение магнитного сопротивления зазора из-за зубчатости якоря (
— коэффициент воздушного зазора, учитывающий увеличение магнитного сопротивления зазора из-за зубчатости якоря (  > 1).
> 1).
Магнитная индукция в воздушном зазоре  (Тл) пропорциональна основному магнитному потоку Ф. В машинах постоянного тока общего назначения
(Тл) пропорциональна основному магнитному потоку Ф. В машинах постоянного тока общего назначения  Тл (большие значения
Тл (большие значения  соответствуютболее крупным машинам).
соответствуютболее крупным машинам).
Обычно расчет МДС  ведут для ряда значений магнитного потока
ведут для ряда значений магнитного потока  и
и  , а затем строят магнитную характеристику машины
, а затем строят магнитную характеристику машины  , где
, где  — относительное значение магнитного потока;
— относительное значение магнитного потока;  — относительное значение МДС обмотки возбуждения на пару полюсов в режиме х.х.;
— относительное значение МДС обмотки возбуждения на пару полюсов в режиме х.х.;  и
и  — номинальные значения магнитного потока и МДС в режиме х.х., соответствующие номинальному значению ЭДС [см. (26.2)]. В начальной части магнитная характеристика прямолинейна (рис. 26.3). Объясняется это тем, что при небольших значениях
— номинальные значения магнитного потока и МДС в режиме х.х., соответствующие номинальному значению ЭДС [см. (26.2)]. В начальной части магнитная характеристика прямолинейна (рис. 26.3). Объясняется это тем, что при небольших значениях  магнитная цепь не насыщена и МДС возбуждения определяется, в основном, магнитным напряжением воздушного зазора
магнитная цепь не насыщена и МДС возбуждения определяется, в основном, магнитным напряжением воздушного зазора  .
.

Рис. 26.3 Магнитная характеристика
Затем с ростом наступает насыщение магнитной цепи и магнитная характеристика становится криволинейной. Коэффициент насыщения магнитной цепи машины
 . (26.5)
. (26.5)
Для машин постоянного тока  .
.
§
Размагничивающее влияние реакции якоря при нагрузке машины постоянного тока учитывают при расчете числа витков полюсных катушек возбуждения. С этой целью при расчете числа витков такой катушки  , используют значение МДС обмотки возбуждения
, используют значение МДС обмотки возбуждения  , соответствующее номинальной нагрузке машины:
, соответствующее номинальной нагрузке машины:
 , (26.8)
, (26.8)
где  — ток в обмотке возбуждения, А.
— ток в обмотке возбуждения, А.
Значение МДС обмотки возбуждения на пару полюсов должно быть таким, чтобы ЭДС якоря при работе машины с номинальной нагрузкой была такой же, что и в режиме холостого хода, когда МДС возбуждения  [см. (26.1)].
[см. (26.1)].
В современных машинах постоянного тока щетки устанавливают на геометрической нейтрали. В этом случае МДС обмотки возбуждения при нагрузке машины:
 . (26.9)
. (26.9)
Здесь  представляет собой приращение МДС обмотки воз буждения, компенсирующее размагничивающее влияние реакции якоря по поперечной оси на пару полюсов (А).
представляет собой приращение МДС обмотки воз буждения, компенсирующее размагничивающее влияние реакции якоря по поперечной оси на пару полюсов (А).
Количественный учет размагничивающего действия реакции якоря усложнен тем, что МДС поперечной реакции якоря действует перпендикулярно оси главных полюсов и вызывает искажение магнитного потока обмотки возбуждения. Возникающее при этом размагничивание машины происходит из-за магнитного насыщения элементов магнитной цепи машины, в первую очередь зубцов сердечника якоря.

Рис. 26.6. График 
Размагничивающее действие реакции якоря по поперечной оси учитывают введением коэффициента реакции якоря  . Этот коэффициент получен в результате исследования большого количества некомпенсированных машин постоянного тока при различных значениях магнитной индукции в зубцах якоря
. Этот коэффициент получен в результате исследования большого количества некомпенсированных машин постоянного тока при различных значениях магнитной индукции в зубцах якоря  .
.
Приращение МДС, компенсирующее реакцию якоря по поперечной оси (А),
 , (26.10)
, (26.10)
где  — МДС обмотки якоря на пару полюсов (26.6), А.
— МДС обмотки якоря на пару полюсов (26.6), А.
Для большинства машин постоянного тока магнитная индукция в зубцах якоря  Тл. Приращение МДС
Тл. Приращение МДС  определяют по графику
определяют по графику  (рис. 26.6), где нижняя граница графика соответствует
(рис. 26.6), где нижняя граница графика соответствует  = 1,7 Тл, а верхняя — =2,3 Тл.
= 1,7 Тл, а верхняя — =2,3 Тл.
Значение тока в обмотке возбуждения [см. (26.8)] принимают в зависимости от вида возбуждения машины постоянного тока: при параллельном возбуждении при мощности машин от 10 до 1000 кВт ток  принимают соответственно от 4,0 до 1,0% от номинального тока машины, а в машинах мощностью от 1 до 10 кВт -соответственно от 8,0 до 4,0%; в машинах последовательного возбуждения ток возбуждения принимают равным току якоря (см. § 29.6).
принимают соответственно от 4,0 до 1,0% от номинального тока машины, а в машинах мощностью от 1 до 10 кВт -соответственно от 8,0 до 4,0%; в машинах последовательного возбуждения ток возбуждения принимают равным току якоря (см. § 29.6).
В машинах постоянного тока с компенсационной обмоткой (см. § 26.4)  , т. е. расчет числа витков полюсной катушки (26.8) ведут по величине
, т. е. расчет числа витков полюсной катушки (26.8) ведут по величине  .
.
Пример 26.1. Двигатель постоянного тока параллельного возбуждения мощностью  кВт работает от сети напряжением
кВт работает от сети напряжением  = 220 В. КПД двигателя при номинальной нагрузке
= 220 В. КПД двигателя при номинальной нагрузке  = 0,89. Двигатель четырехполюсный, обмотка якоря простая волновая (2
= 0,89. Двигатель четырехполюсный, обмотка якоря простая волновая (2  =2), число эффективных проводников в обмотке N = 164, ток возбуждения составляет 1,3% от номинального потребляемого двигателем тока. Определить число витков в полюсной катушке возбуждения
=2), число эффективных проводников в обмотке N = 164, ток возбуждения составляет 1,3% от номинального потребляемого двигателем тока. Определить число витков в полюсной катушке возбуждения  , если все они соединены последовательно, воздушный зазор
, если все они соединены последовательно, воздушный зазор  =2,0 мм, коэффициент воздушного зазора
=2,0 мм, коэффициент воздушного зазора  = 1,3, магнитная индукция в зазоре
= 1,3, магнитная индукция в зазоре  = 0,76 Тл, в зубцах якоря = 1,8 Тл, а коэффициент насыщения магнитной цепи машины
= 0,76 Тл, в зубцах якоря = 1,8 Тл, а коэффициент насыщения магнитной цепи машины  =1,35.
=1,35.
Решение. Ток, потребляемый двигателем при номинальной нагрузке.
 А.
А.
Ток в обмотке возбуждения
 А.
А.
Ток в обмотке якоря
 А.
А.
Магнитное напряжение воздушного зазора по (26.4)
 А.
А.
МДС возбуждения в режиме холостого хода на пару полюсов
 А.
А.
МДС обмотки якоря на пару полюсов по (26.6)
 А.
А.
Коэффициент реакции якоря по рис. 26.6 при  и
и  Тл равен
Тл равен  0,19.
0,19.
Приращение МДС, компенсирующее реакцию якоря по поперечной оси, по (26.10)
 А.
А.
МДС возбуждения при номинальной нагрузке двигателя по (26.9)
 А.
А.
Число витков в полюсной катушке возбуждения по (26.8)

§
В связи с тем что реакция якоря неблагоприятно влияет на рабочие свойства машины постоянного тока 1, при проектировании машины принимают меры к устранению реакции якоря или хотя бы к ослаблению ее влияния до допустимых пределов.
Компенсационная обмотка. Наиболее эффективным средством подавления влияния реакции якоря по поперечной оси является применение в машине компенсационной обмотки. Эту обмотку укладывают в пазы полюсных наконечников (рис. 26.7) и включают последовательно с обмоткой якоря таким образом, чтобы МДС компенсационной обмотки  была противоположна по направлению МДС обмотки якоря . Компенсационную обмотку делают распределенной по поверхности полюсного наконечника всех главных полюсов машины. При этом линейную нагрузку для компенсационной обмотки принимают равной линейной нагрузке обмотки якоря.
была противоположна по направлению МДС обмотки якоря . Компенсационную обмотку делают распределенной по поверхности полюсного наконечника всех главных полюсов машины. При этом линейную нагрузку для компенсационной обмотки принимают равной линейной нагрузке обмотки якоря.
Включение компенсационной обмотки последовательно в цепь якоря обеспечивает автоматичность компенсации МДС якоря при любой (в пределах номинальной) нагрузке машины. Таким образом, в машине постоянного тока с компенсационной обмоткой при переходе от холостого хода к режиму нагрузки закон распределения магнитной индукции в зазоре главных полюсов остается практически неизменным. Однако в межполюсном пространстве часть МДС якоря остается нескомпенсированной. Нежелательное влияние этой МДС на работу щеточного контакта устраняют применением в машине добавочных полюсов (см. § 27.4).
Компенсационные обмотки применяют лишь в машинах средней и большой мощности — более 150—500 кВт при > 440 В, работающих с резкими колебаниями нагрузки, например в двигателях для прокатных станов. Объясняется это тем, что компенсационная обмотка удорожает и усложняет машину и ее применение в некоторых случаях экономически не оправдывается.
1 Исключение составляют машины постоянного тока, в которых поперечное поле’ якоря используется полезно, например электромашинные усилители поперечного поля (см. § 30.1).

Рис. 26.7. Компенсационная обмотка
Увеличение воздушного зазора под главными полюсами. В машинах малой и средней мощности, не имеющих компенсационной обмотки, вредное влияние реакции якоря по поперечной оси ослабляют соответствующим выбором воздушного зазора под главными полюсами. При этом следует иметь в виду, что при достаточно малом воздушном зазоре и значительной линейной нагрузке реакция якоря по поперечной оси может не только ослабить магнитное поле под одной из частей главного полюса, но и перемагнитить его, т. е. изменить полярность — «опрокинуть поле». Некоторое увеличение воздушного зазора под главными полюсами, особенно на их краях, значительно ослабляет действие реакции якоря. Однако не следует забывать, что увеличение воздушного зазора ведет к необходимости повышения МДС обмотки главных полюсов, а следовательно, и к увеличению размеров полюсных катушек, полюсов и габарита машины в целом.
На этом же принципе уменьшения МДС поперечной реакции якоря за счет повышенного магнитного сопротивления на пути ее действия основан и другой способ ослабления действия реакции коря. Этот способ состоит в том, что сердечники главных полюсов делают из листовой анизотропной (холоднокатаной) стали (обычно применяют сталь марки 3411). Эта сталь в направлении проката обладает повышенной магнитной проницаемостью, а «поперек проката» — небольшой магнитной проницаемостью. Штамповать пластины полюсов из такой стали следует так, чтобы ось полюса совпадала с направлением проката листа стали.
§
Период коммутации в современных машинах постоянного тока весьма мал и составляет приблизительно 10-3 – 10-5 с. При этом средняя скорость изменения тока в коммутирующей секции (di/ dt)ср = 2iа/ Тк очень велика, что приводит к появлению в коммутирующей секции ЭДС самоиндукции
eL = – Lc ( di / dt ), (27.5)
где Lс — индуктивность секции; i — ток в коммутирующей секции.

Рис. 27.3. Магнитная связь одновременно коммутирующих секций:
а — при полном шаге (у1 = τ); б — при укороченном шаге обмотки якоря (у1 < τ)
Обычно в каждом пазу якоря находится несколько пазовых сторон (не менее двух), принадлежащих разным секциям. При этом если шаг обмотки полный (у1 = τ), то все эти секции одновременно находятся в состоянии коммутации, будучи замкнутыми разными щетками (рис. 27.3, а). Обычно ширина щетки больше коллекторного деления и каждая щетка замыкает одновременно несколько секций. Так как пазовые части коммутирующих секций лежат в одних пазах, то изменяющийся магнитный поток каждой из этих частей наводит в пазовых частях других секций ЭДС взаимоиндукции
ем = – Мс ( di / dt ), (27.6)
где Мс — взаимная индуктивность одновременно коммутирующих секций.
Обе ЭДС создают в коммутирующей секции реактивную (результирующую) ЭДС
ер = е L ем = -( Lc M с )( di / dt ) (27.7)
которая препятствует изменению тока в коммутирующей секции. Кроме того, под влиянием реакции якоря магнитная индукция в зоне коммутации (на геометрической нейтрали) приобретает некоторое значение Вк (см. рис. 26.4, в), под действием которой в коммутирующей секции наводится ЭДС вращения
евр = Вк 2 lwcv , (27.8)
где l — длина пазовых частей секции; wс — число витков в секции; v — линейная скорость движения секции.
Электродвижущая сила вращения в отличие от реактивной ЭДС может иметь разное направление в зависимости от полярности внешнего магнитного поля в зоне коммутации. Если машина не имеет добавочных полюсов, то ЭДС вращения направлена согласованно с реактивной ЭДС. В этом случае в контуре коммутирующей секции действует сумма ЭДС
∑ e = e р e в.р. (27.9)
С учетом изложенного уравнение по второму закону Кирхгофа для коммутирующей секции замкнутой щеткой имеет вид
i 1 r 1 – i 2 r 2 = ∑ e (27.10)
или с учетом (27.3) запишем выражение тока в коммутирующей секции при криволинейной замедленной коммутации:
i = [ia(r2 – r1)/ (r2 r1)] [∑e/ (r2 r1)] (27.11)
Первое слагаемое правой части полученного выражения представляет собой ток прямолинейной коммутации [см. (27.3)]
i пр = i а ( r 2 – r 1 )/ ( r 2 r 1 ) (27.12)
Второе слагаемое правой части выражения (27.11) определяет значение дополнительного тока коммутации, возникающего в контуре коммутирующей секции под действием ЭДС ∑e:
i д = ∑ e /( r 2 r 1 ). (27-13)
Таким образом, ток в коммутирующей секции при криволинейной замедленной коммутации равен сумме двух составляющих:
i = i пр i д . (27.14)
Характер изменения тока iпр определяется графиком, показанным на рис. 27.2. Что же касается дополнительного тока коммутации iд, то для определения характера его изменения за период коммутации необходимо предварительно выяснить, как меняются за период коммутации величины, определяющие этот ток, а именно ЭДС ∑e и сумма сопротивлений (r2 r1).
Если в машине нет добавочных полюсов и магнитная индукция в зоне коммутации Вк невелика, то ЭДС ∑e определяется главным образом реактивной ЭДС ер = -(Lс Мс)(di/dt). При прямолинейном законе изменения тока di/dt = соnst, а следовательно, ∑e = const.
Закон изменения суммы сопротивлений (r1 r2) определяется выражением
r 2 r 1 = (27.15)
(27.15)
где R — сопротивление переходного контакта «щетка—пластина», когда пластина коллектора полностью перекрыта щеткой и площадь ее переходного контакта равна Sk.
В начале (t = 0) и в конце (t = Tк) коммутации r1 r2 = ∞; при t = 0,5 Tk Гц сумма сопротивлений r2 r1 = 4R. На рис. 27.4, а представлен график (r2 r1) = f(t). Этому закону изменения суммы сопротивлений и постоянству ЭДС ∑e соответствует кривая 1 изменения добавочного тока коммутации iд = f(t)представленная на рис. 27.4, б.

Рис. 27.4. Графики изменений сопротивлений (r1 r2) и тока iд
График изменения результирующего тока коммутации i = iпр iд = f(t), полученный сложением ординат графиков тока прямолинейной коммутации iпр = f(t) (см. рис. 27.2) и добавочного тока коммутации iд = f(t) (см. рис. 27.4, б, график 1), представлен на рис. 27.5. Криволинейный вид этого графика обусловлен криволинейностью графика iд = f(t). Физически это объясняется реактивным действием суммарной ЭДС ∑e, наводимой в коммутирующей секции, препятствующей изменениям тока в этой секции от iа в начале коммутации до – ia в ее конце. По этой причине в середине периода коммутации (точка а) ток в коммутирующей секции ia = iд, т.е. он не равен нулю, как это имело место при прямолинейной коммутации (см. рис. 27.2), а равен добавочному току коммутации iд, который в этот момент времени (t = 0,5 Tк) имеет наибольшее значение (см. рис. 27.4, б, график 1). Уменьшение тока ia до нуля и изменение его направления наступают во второй половине периода коммутации в момент времени t > 0,5 Тк (точка b), т. е. по сравнению с прямолинейной в рассматриваемом виде коммутации процесс изменения направления тока в коммутирующей секции затягивается во времени. В итоге график коммутации приобретает криволинейный вид. По этой причине такую коммутацию называют криволинейной замедленной. Характерный признак этого вида коммутации — неодинаковая плотность тока под щеткой в начале и в конце периода коммутации.
В этом можно убедиться, воспользовавшись построениями, сделанными на рис. 27.5, для момента времени t = 0,5 Тк.
Среднее значение плотности тока под набегающим краем щетки j2, имеющим контакт с пластиной 2 (рис. 27.6, а), меньше среднего значения плотности тока j1 под сбегающим краем щетки, имеющим контакт с пластиной 1. С одной стороны, это объясняется тем, что tg α2 < tg α1, (см. рис. 27.5), а с другой стороны, тем, что при t = 0,5 Tк токи, отходящие в обмотку якоря через пластины 1 и 2, не равны: i2 < i1. При криволинейной замедленной коммутации площадь S1 соприкосновения пластины 1 с щеткой уменьшается быстрее, чем ток i1 = iа iд, а поэтому плотность тока под сбегающим краем щетки повышается. К концу периода коммутации эта плотность тока достигает наибольшего значения j ≡ tg α/1, где α/1 соответствует t ≈ Тк (см. рис. 27.5).

Рис. 27.5. График тока криволинейной замедленной коммутации
При значительных нагрузках машины плотность тока под сбегающим краем щетки может достигнуть недопустимо больших значений и вызвать искрение на коллекторе. Однако, как показывает опыт, возможно появление искрения и при небольших нагрузочных токах в цепи якоря. Это свидетельствует о том, что увеличение плотности тока под сбегающим краем щетки не единственная причина искрения на коллекторе. Искрение возникает также при размыкании замкнутой накоротко щеткой цепи коммутирующей секции при выходе сбегающей пластины коллектора из-под щетки. В момент размыкания коммутирующей секции с добавочным током коммутации накопленная в ней энергия магнитного поля (Дж)
W = 0,5 Lc i 2д (27.16)

Рис. 27.6. Распределение плотности тока под щеткой при криволинейной
замедленной (а) и ускоренной (б) видах коммутации
затрачивается на создание электрической дуги между сбегающим краем щетки и сбегающей коллекторной пластиной.
Изложенные выше свойства криволинейной замедленной коммутации — повышение плотности тока под сбегающим краем щетки и выход сбегающей пластины из-под щетки с разрывом цепи тока коммутации — создают условия к возникновению искрения на коллекторе под сбегающими краями щеток.
§ 27.4. Способы улучшения коммутации
Основная причина неудовлетворительной коммутации в машинах постоянного тока — добавочный ток коммутации
i д = ∑ e / ∑ r к (27.17)
Здесь ∑rк — сумма электрических сопротивлений добавочному току коммутации iд:
сопротивления мест пайки в петушках, переходного контакта между коллекторными пластинами и щеткой и собственно щетки.
Однако из перечисленных сопротивлений, входящих в ∑rк, наибольшее значение имеет сопротивление щетки и переходного контакта, поэтому, обозначив их rщ, с некоторым приближением можно записать
i д = ∑ e / r щ (27-18)
Из полученного выражения следует, что уменьшить ток iд, а следовательно улучшить коммутацию, можно либо увеличением сопротивления rщ, либо уменьшением суммарной ЭДС ∑e в коммутирующей секции. Отсюда вытекает ряд способов улучшения коммутации, основные из которых рассмотрены ниже.
Выбор щеток. С точки зрения обеспечения удовлетворительной коммутации целесообразнее применять щетки с большим переходным падением напряжения в переходном контакте и собственно щетке, т. е. щетке с большим сопротивлением rщ. Однако допустимая плотность тока в щеточном контакте этих щеток невелика, а поэтому их применение в машинах со значительным рабочим током ведет к необходимости увеличения площади щеточного контакта, что требует увеличения площади коллектора за счет его длины. Это привело бы к увеличению габаритов машины и дополнительному расходу меди. Поэтому щетки с большим rщ применяют преимущественно в машинах с относительно высоким напряжением, а следовательно, и с небольшим рабочим током.
Щетки для электрических машин разделяют на четыре группы, различающиеся составом, способом изготовления и характеристиками (табл. 27.1). Выбирают щетки в соответствии с рекомендациями, выработанными на основании многолетнего опыта проектирования и эсплуатации электрических машин. Наибольшее применение в машинах постоянного тока напряжением 110 — 440 В имеют электрографитированные щетки.
Увеличению переходного сопротивления щеточного контакта, а следовательно улучшению коммутации, способствует политура коллектора — тонкая оксидная пленка на поверхности коллектора, обладающая повышенным электрическим сопротивлением.
Уменьшение реактивной ЭДС. Существенное влияние на суммарную ЭДС в коммутирующей секции оказывает реактивная ЭДС ер = el ем. ЭДС взаимоиндукции ем в значительной степени зависит от ширины щетки: чем шире щетка, тем большее число коллекторных пластин перекрывает она одновременно, а следовательно, тем больше секций одновременно коммутируется, что вызывает повышение ЭДС взаимоиндукции ем. Однако слишком узкие щетки также нежелательны из-за недостаточной механической прочности, а также потому, что для создания необходимой площади контактной поверхности в узкой щетке
Таблица 27.1
| Группа щеток, обозначение | Переходное падение напряжения на пару щеток при номина- льном токе, В | Номинальная плот- ность тока, А/мм2 | Область применения |
| Графитовые Г, 611М | 1,9—2,0 | 0,11—0,12 | Для машин с облегченными условиями коммутации |
| Электрографитированные ЭГ | 2,0—2,7 | 0,10—0,15 | Для машин со средними и затрудненными условиями коммутации и для контактных колец |
| Угольно-графитовые УГ;Т | 2,0 | 0,06—0,07 | Для машин со средними условиями коммутации |
| Медно-графитовые М, МГ | 0,2—1,5 | 0,15—0,20 | Для низковольтных (до 48 В) машин и контактных колец |
пришлось бы увеличить ее длину, а это привело бы к необходимости увеличения длины коллектора. Наиболее целесообразны щетки шириной в 2—3 коллекторных деления.
Заметное влияние на реактивную ЭДС оказывает тип обмотки якоря. Так, если обмотку якоря выполнить с укороченным шагом (у1 < τ), то активные стороны одновременно коммутирующих секций окажутся в разных пазах (см. рис. 27.3, б), что будет способствовать уменьшению ЭДС взаимоиндукции. Реактивная ЭДС может быть ослаблена уменьшением индуктивности секций Lc. Для этого следует применять в обмотке якоря секции с большим числом витков (Lc ≡ wc) и полузакрытые пазы. Однако осуществление многих мероприятий привело бы к созданию громоздких и неэкономичных машин. Поэтому при проектировании машин постоянного тока выбор указанных параметров связывают со стремлением получить компактную и экономичную машину. При этом реактивная ЭДС может быть в значительной степени уменьшена или даже полностью устранена созданием в зоне коммутации (по оси щеток) коммутирующего поля определенной полярности и величины. Создается такое поле добавочными полюсами или сдвигом щеток геометрической нейтрали.
Добавочные полюсы. Назначение добавочных полюсов – создать в зоне коммутации магнитное поле такой величины и направления, чтобы наводимая этим полем в коммутирующей секции ЭДС вращения евр компенсировала реактивную ЭДС ер. В машине постоянного тока без принятия мер по улучшению коммутации ЭДС ер и евр направлены в одну сторону, т. е. действуют согласно:
∑ e =  .
.
Суммарная ЭДС в коммутирующей секции ∑ e окажется равной нулю, если посредством добавочных полюсов создать в зоне коммутации магнитное поле с магнитной индукцией Вк такой величины и направления, чтобы ЭДС вращения евр изменила свое направление на обратное [см. (27.8)], а значение ее было бы равно ЭДС реактивной ер. В этом случае
∑ e =  .
.
и коммутация становится прямолинейной (идеальной).
Добавочные полюсы располагают между главными. При этом щетки устанавливают на геометрической нейтрали.
Все машины постоянного тока мощностью свыше 1 кВт снабжаются добавочными полюсами, число которых принимают равным числу главных полюсов или же вдвое меньшим. Наличие добавочных полюсов позволяет увеличить линейную нагрузку машины и при заданной мощности получить машину меньшего веса и габаритов.
Число витков обмотки добавочных полюсов выбирают таким, чтобы МДС добавочных полюсов компенсировала МДС якоря по поперечной оси в зоне коммутации и имела некоторый избыток, необходимый для создания коммутирующего поля с индукцией Вк, направленного противоположно полю реакции якоря (рис. 27.7). Исходя из этого, МДС добавочного полюса для некомпенсированных машин постоянного тока принимают равной (А)
Fд = kдFa (27.19)
где kд = Fд / Fа – коэффициент, учитывающий требуемое превышение МДС обмотки добавочного полюса Fд над МДС якоря Fа [см. (26.6)]. Для машин постоянного тока современных серий этот коэффициент принимают равным kд = 1,20 ÷ 1,45.
Если машина снабжена компенсационной обмоткой, то МДС добавочных полюсов следует уменьшить на величину МДС компенсационной обмотки Fк.о. Обычно в компенсированных машинах постоянного тока МДС добавочных полюсов на 15—30 % больше МДС якоря.
Если МДС добавочных полюсов сделать больше требуемого значения [см. (27.19) ], то ЭДС вращения евр станет больше реактивной ЭДС. В этом случае суммарная ЭДС ∑e изменит свой знак, а добавочный ток коммутации — свое направление на противоположное по сравнению с тем, какое он имел при криволинейной замедленной коммутации (см. рис. 27.4,6, кривая 2).

Рис. 27.7. Результирующее магнитное поле в воздушном
зазоре машины с добавочными полюсами в
генераторном (Г) и двигательном (Д) режимах
График изменения результирующего тока коммутации i2 = ia iд в этом случае принимает вид, представленный на рис. 27.8, т. е. коммутация становится криволинейной ускоренной, так как ток в коммутирующей секции достигает нулевого значения за время Т < 0,5 Тк (точка b). Для криволинейной ускоренной коммутации характерно повышение плотности тока под набегающим краем щетки (см. рис. 27.6, б). Объясняется это тем, что при этом виде коммутации площадь соприкосновения пластины 2 с щеткой нарастает медленнее, чем увеличивается ток i2 = ia iд. Наибольшее значение плотности тока у/2 ≡ tg α/2 соответствует началу периода коммутации (t ≈ 0). При значительных нагрузках это может привести к искрению под набегающим краем щетки. Это объясняется тем, что при ускоренной коммутации выход сбегающей пластины из-под щетки происходит с разрывом цепи добавочного тока коммутации, который имеет направление, противоположное току замедленной коммутации.
Для обеспечения компенсации реактивной ЭДС при различных нагрузках машины обмотку добавочных полюсов включают последовательно с обмоткой якоря. В этом случае МДС добавочных полюсов Fд при различных нагрузках машины изменяется пропорционально току якоря Iа, т. е. пропорционально МДС якоря Fа.

Рис. 27.8. График тока криволинейной ускоренной коммутации
Полярность добавочного полюса в генераторе должна быть такой же, как и у следующего по направлению вращения главного полюса, а в двигателе — как у предшествующего полюса (рис. 27.9).


Рис. 27.9. Полярность добавочных полюсов Рис. 27.10. График изменения ЭДС в
при работе машины в генераторном и коммутирующей секции в зависимости
двигательном режимах от тока нагрузки
Добавочные полюсы обеспечивают удовлетворительную коммутацию в машине только в
пределах номинальной нагрузки.

Рис. 27.11. К понятию о потоке рассеяния
добавочных полюсов
При перегрузке машины происходит насыщение магнитной цепи добавочных полюсов. В этом случае реактивная ЭДС ер изменяется пропорционально току нагрузки, а рост ЭДС внешнего поля из-за насыщения магнитной цепи несколько задерживается (рис. 27.10). В результате в коммутирующей секции появляется суммарная ЭДС ∑е = ер – ек, т. е. коммутация становится замедленной. Насыщению сердечников добавочных полюсов способствует магнитный поток рассеяния Фдσ, замыкающийся через сердечники смежных главных полюсов и станину (рис. 27.11). В целях уменьшения магнитного потока рассеяния, а следовательно, обеспечения более линейной зависимости потока добавочных полюсов от тока нагрузки воздушный зазор добавочного полюса δд разделяют на два: один — между сердечником полюса и якорем δд1, — а другой между сердечником полюса и станиной δд2 (см. рис. 27.7). В
этом случае зазор δд2 ограничит значение потока Фдσ. Зазор δд2 создается пакетом немагнитных прокладок, закладываемых между сердечником полюса и станиной.
Получение коммутирующего поля смещением щеток. В машинах постоянного тока мощностью до 1 кВт, выполняемых без добавочных полюсов, коммутирующее поле в зоне коммутации создается смещением щеток с геометрической нейтрали. Если щетки установлены на геометрической нейтрали (рис. 27.12, а), то поперечное магнитное поле якоря с магнитной индукцией Ваq создает в зоне коммутации индукцию Вк (рис. 27.12, б). В результате в коммутирующих секциях наводится ЭДС вращения евр, направленная согласованно с реактивной ЭДС ер и способствующая замедленной коммутации. При сдвиге щеток на

Рис. 27.12. Создание коммутирующего поля сдвигом щеток
физическую нейтраль mm’ коммутирующее поле с индукцией Вк исчезает и ЭДС вращения евр = 0. При этом в коммутирующих секциях наводится лишь реактивная ЭДС ер. Если же щетки сдвинуть на угол β, т. е. за физическую нейтраль mm’ (линия cc’), то коммутирующее поле с индукцией В’к изменит свое направление относительно направления при положении щеток на геометрической нейтрали. Это поле будет наводить в коммутирующих секциях ЭДС вращения, равную реактивной ЭДС и противоположную ей по направлению (евр – ер = 0), т. е. реактивная ЭДС окажется скомпенсированной и коммутация станет прямолинейной (идеальной). Для получения необходимого эффекта щетки следует смещать в направлении вращения якоря у генераторов или против вращения якоря у двигателей.
Описанный способ улучшения коммутации имеет следующие недостатки: а) коммутирующее поле изменяется не пропорционально нагрузке машины, что исключает полную компенсацию реактивной ЭДС во всем диапазоне нагрузок, так как для этого пришлось бы при каждом изменении нагрузки менять положение щеток (обычно щетки устанавливают в фиксированное положение, соответствующее полной компенсации реактивной ЭДС при номинальной нагрузке); б) при смещении щеток с геометрической нейтрали усиливается размагничивающее действие реакции якоря (см. рис. 26.5); в) для реверсируемых машин смещение щеток с геометрической нейтрали недопустимо, так как требуемое направление смещения физической нейтрали меняется с изменением направления вращения якоря.
§
При неудовлетворительной коммутации коллекторная машина становится источником радиопомех, ухудшающих качество радиоприема, а иногда делающих его невозможным, поэтому уровень индустриальных радиопомех не должен превышать значений, определяемых действующими нормами.
Радиопомехи распространяются двумя путями: по эфиру (электромагнитное излучение) и через электросеть. Для подавления помех, распространяемых по эфиру, электрические машины экранируют. В качестве экрана используют заземленный корпус машины. Если со стороны коллектора в машине имеются окна, то их следует закрыть металлическим колпаком или сеткой, обеспечив им надежный контакт с корпусом машины.
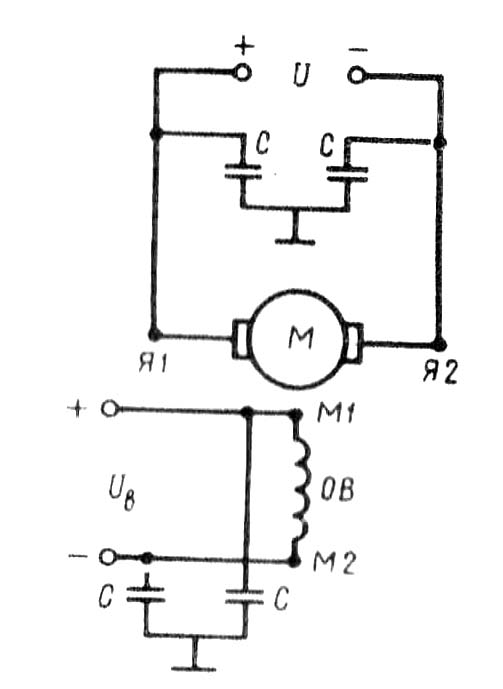
Рис. 27.14. Схема включения помехозащитного фильтра
Для подавления помех, проникающих от машины в сеть, применяют симметрирование обмоток и включение фильтров. Симметрирование обмоток состоит в том, что каждую обмотку, включенную последовательно в цепь якоря, разделяют на две равные части и присоединяют симметрично к щеткам разной полярности.
Применение фильтров — основной способ подавления радиопомех. Для большинства машин достаточно установить емкостный фильтр в виде конденсаторов, включаемых между каждым токонесущим проводом и корпусом машины (рис. 24.14). Значение емкости конденсаторов подбирают опытным путем, при этом они должны быть рассчитаны на рабочее напряжение машины. Для фильтров предпочтительны проходные конденсаторы типа КБП, у которых одним из зажимов является металлическая оболочка, прикрепляемая непосредственно к корпусу машины.
Контрольные вопросы
1.Какие причины могут вызвать искрение на коллекторе?
2.Какие степени искрения предусмотрены ГОСТом? Дайте каждой из них характеристику и укажите условия допустимости.
3.Почему прямолинейная коммутация не сопровождается искрением?
4.Какие причины, вызывающие искрение, возникают при замедленной коммутации?
5.Объясните назначение и устройство добавочных полюсов.
6.Каковы причины, способные вызвать круговой огонь по коллектору?
7.Как можно снизить уровень радиопомех в коллекторной машине?
Глава 28
Коллекторные генераторы постоянного тока
Основные понятия
В процессе работы генератора постоянного тока в обмотке якоря индуцируется ЭДС [см. (25.20)]. При подключении к генератору нагрузки в цепи якоря возникает ток, а на выводах генератора устанавливается напряжение, определяемое уравнением напряжений для цепи якоря генератора:
 . (28.1)
. (28.1)
Здесь
 (28.2)
(28.2)
— сумма сопротивлений всех участков цепи якоря: обмотки якоря  , обмотки добавочных полюсов
, обмотки добавочных полюсов  , компенсационной обмотки
, компенсационной обмотки  , последовательной обмотки возбуждения
, последовательной обмотки возбуждения  и переходного щеточного контакта
и переходного щеточного контакта  .
.
При отсутствии в машине каких-либо из указанных обмоток в (28.2) не входят соответствующие слагаемые.
Якорь генератора приводится во вращение приводным двигателем, который создает на валу генератора вращающий момент  . Если генератор работает в режиме х.х.
. Если генератор работает в режиме х.х.  , то для вращения его якоря нужен сравнительно небольшой момент холостого хода
, то для вращения его якоря нужен сравнительно небольшой момент холостого хода  . Этот момент обусловлен тормозными моментами, возникающими в генераторе при его работе в режиме х.х.: моментами от сил трения и вихревых токов в якоре.
. Этот момент обусловлен тормозными моментами, возникающими в генераторе при его работе в режиме х.х.: моментами от сил трения и вихревых токов в якоре.
При работе нагруженного генератора в проводах обмотки якоря появляется ток, который, взаимодействуя с магнитным полем возбуждения, создает на якоре электромагнитный момент М [см. (25.24)]. В генераторе этот момент направлен встречно вращающему моменту приводного двигателя ПД (рис. 28.1), т. е. он является нагрузочным (тормозящим).
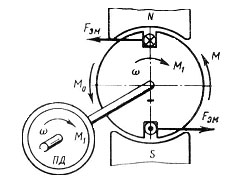
Рис. 28.1. Моменты, действующие в генераторе постоянного тока
При неизменной частоте вращения  вращающий момент приводного двигателя
вращающий момент приводного двигателя  уравновешивается суммой противодействующих моментов: моментом х.х. и электромагнитным моментом М, т. е.
уравновешивается суммой противодействующих моментов: моментом х.х. и электромагнитным моментом М, т. е.
 . (28.3)
. (28.3)
Выражение (28.3) — уравнение моментов для генератора при  . Умножив члены уравнения (28.3) на угловую скорость вращения якоря
. Умножив члены уравнения (28.3) на угловую скорость вращения якоря  , получим уравнение мощностей:
, получим уравнение мощностей:
 , (28.4)
, (28.4)
где  — подводимая от приводного двигателя к генератору мощность (механическая);
— подводимая от приводного двигателя к генератору мощность (механическая);  —мощность х.х., т. е. мощность, подводимая к генератору в режиме х.х. (при отключенной нагрузке);
—мощность х.х., т. е. мощность, подводимая к генератору в режиме х.х. (при отключенной нагрузке);  — электромагнитная мощность генератора.
— электромагнитная мощность генератора.
Согласно (25.27), получим
 ,
,
или с учетом (28.1)
 , (28.5)
, (28.5)
где  — полезная мощность генератора (электрическая), т. е. мощность, отдаваемая генератором нагрузке;
— полезная мощность генератора (электрическая), т. е. мощность, отдаваемая генератором нагрузке;  — мощность потерь на нагрев обмоток и щеточного контакта в цепи якоря (см. § 29.8).
— мощность потерь на нагрев обмоток и щеточного контакта в цепи якоря (см. § 29.8).
Учитывая потери на возбуждение генератора  ,получим уравнение мощностей для генератора постоянного тока:
,получим уравнение мощностей для генератора постоянного тока:
 . (28.6)
. (28.6)
Следовательно, механическая мощность, развиваемая приво дным двигателем  , преобразуется в генераторе в полезную электрическую мощность
, преобразуется в генераторе в полезную электрическую мощность  , передаваемую нагрузке, и мощ ность, затрачиваемую на покрытие потерь
, передаваемую нагрузке, и мощ ность, затрачиваемую на покрытие потерь  .
.
Так как генераторы обычно работают при неизменной частоте вращения, то их характеристики рассматривают при условии  . Рассмотрим основные характеристики генераторов постоянного тока.
. Рассмотрим основные характеристики генераторов постоянного тока.
Характеристика холостого хода — зависимость напряжения на выходе генератора в режиме х.х.  от тока возбуждения :
от тока возбуждения :
 при
при  и
и  .
.
Нагрузочная характеристика — зависимость напряжения на выходе генератора U при работе с нагрузкой от тока возбуждения :
 при
при  и
и  .
.
Внешняя характеристика — зависимость напряжения на выходе генератора U от тока нагрузки  :
:
 при
при  и ,
и ,
где  — регулировочное сопротивление в цепи обмотки возбуждения.
— регулировочное сопротивление в цепи обмотки возбуждения.
Регулировочная характеристика — зависимость тока возбуждения от тока нагрузки при неизменном напряжении на выходе генератора:
 при
при  и .
и .
Вид перечисленных характеристик определяет рабочие свойства генераторов постоянного тока.
§
Принцип самовозбуждения генератора постоянного тока основан на том, что магнитная система машины, будучи намагниченной, сохраняет длительное время небольшой магнитный поток остаточного магнетизма сердечников полюсов и станины  (порядка 2—3% от полного потока). При вращении якоря поток
(порядка 2—3% от полного потока). При вращении якоря поток 
Рис. 28.5. Принципиальная схема (а) и характеристика х.х. (б) генератора параллельного возбуждения
индуцирует в якорной обмотке ЭДС  ,под действием которой в обмотке возбуждения возникает небольшой ток
,под действием которой в обмотке возбуждения возникает небольшой ток  . Если МДС обмотки возбуждения
. Если МДС обмотки возбуждения  имеет такое же направление, как и поток
имеет такое же направление, как и поток  , то она увеличивает поток главных полюсов. Это, в свою очередь, вызывает увеличение ЭДС генератора, отчего ток возбуждения вновь увеличится. Так будет продолжаться до тех пор, пока напряжение генератора не будет уравновешено падением напряжения в цепи возбуждения, т. е.
, то она увеличивает поток главных полюсов. Это, в свою очередь, вызывает увеличение ЭДС генератора, отчего ток возбуждения вновь увеличится. Так будет продолжаться до тех пор, пока напряжение генератора не будет уравновешено падением напряжения в цепи возбуждения, т. е.  .
.
На рис. 28.5, а показана схема включения генератора параллельного возбуждения, на рис. 28.5, б — характеристика х.х. генератора (кривая 1) и зависимость падения напряжения от тока возбуждения  (прямая 2). Точка пересечения А соответствует окончанию процесса самовозбуждения, так как именно в ней
(прямая 2). Точка пересечения А соответствует окончанию процесса самовозбуждения, так как именно в ней  .
.
Угол наклона прямой ОА к оси абсцисс определяется из треугольника ОАВ:
 , (28.10)
, (28.10)
где  — масштаб тока (по оси абсцисс), А/мм;
— масштаб тока (по оси абсцисс), А/мм;  — масштаб напряжения (по оси ординат), В/мм.
— масштаб напряжения (по оси ординат), В/мм.
Из (28.10) следует, что угол наклона прямой  к оси абсцисс прямо пропорционален сопротивлению цепи возбуждения. Однако при некотором значении сопротивления реостата
к оси абсцисс прямо пропорционален сопротивлению цепи возбуждения. Однако при некотором значении сопротивления реостата  сопротивление
сопротивление  , достигает значения, при котором зависимость
, достигает значения, при котором зависимость  становится касательной к прямолинейной части характеристики х.х. (прямая 3). В этих условиях генератор не самовозбуждается. Сопротивление цепи возбуждения, при которой прекращается самовозбуждение генератора, называют критиче ским сопротивлением,
становится касательной к прямолинейной части характеристики х.х. (прямая 3). В этих условиях генератор не самовозбуждается. Сопротивление цепи возбуждения, при которой прекращается самовозбуждение генератора, называют критиче ским сопротивлением,  .
.
Следует отметить, что самовозбуждение генератора возможно лишь при частоте вращения, превышающей критическую  . Это условие вытекает из ха рактеристики самовозбуждения гене ратора (рис. 28.6), представляющей собой зависимость напряжения генератора в режиме х.х. от частоты вращения при неизменном сопротивлении цепи возбуждения, т. е.
. Это условие вытекает из ха рактеристики самовозбуждения гене ратора (рис. 28.6), представляющей собой зависимость напряжения генератора в режиме х.х. от частоты вращения при неизменном сопротивлении цепи возбуждения, т. е.  при
при  .
.

Рис. 28.6. Характеристика самовозбуждения
Анализ характеристики самовозбуждения показывает, что при  увеличение частоты вращения якоря генератора сопровождается незначительным увеличением напряжения, так как процесса самовозбуждения нет и появление напряжения на выходе генератора обусловлено лишь остаточным намагничиванием магнитной цепи генератора. Процесс самовозбуждения начинается при
увеличение частоты вращения якоря генератора сопровождается незначительным увеличением напряжения, так как процесса самовозбуждения нет и появление напряжения на выходе генератора обусловлено лишь остаточным намагничиванием магнитной цепи генератора. Процесс самовозбуждения начинается при  . В этом случае увеличение частоты вращения сопровождается резким ростом напряжения . Однако при частоте вращения, близкой к номинальной, рост напряжения несколько замедляется, что объясняется магнитным насыщением генератора. Критическая частота вращения зависит от сопротивления цепи возбуждения и с ростом последнего увеличивается.
. В этом случае увеличение частоты вращения сопровождается резким ростом напряжения . Однако при частоте вращения, близкой к номинальной, рост напряжения несколько замедляется, что объясняется магнитным насыщением генератора. Критическая частота вращения зависит от сопротивления цепи возбуждения и с ростом последнего увеличивается.
Таким образом, самовозбуждение генераторов постоянного тока возможно при соблюдении следующих условий: а) магнитная система машины должна обладать остаточным магнетизмом; б) присоединение обмотки возбуждения должно быть таким, чтобы МДС обмотки совпадала по направлению с потоком остаточного магнетизма ; в) сопротивление цепи возбуждения должно быть меньше критического; г) частота вращения якоря должна быть больше критической.
Так как генератор параллельного возбуждения самовозбуждается лишь в одном направлении, то и характеристика х.х. этого генератора может быть снята только для одного квадранта осей координат.
Нагрузочная и регулировочная характеристики генератора параллельного возбуждения практически не отличаются от соответствующих характеристик генератора независимого возбуждения.
Внешняя характеристика генератора параллельного возбуждения 1 (рис. 28.7) менее жесткая, чем у генератора независимого возбуждения. Объясняется это тем, что в генераторе параллельного возбуждения помимо причин, вызывающих уменьшение напряжения в генераторе независимого возбуждения (реакция якоря и падение напряжения в цепи якоря), действует еще и третья причина — уменьшение тока возбуждения, вызванное снижением напряжения от действия первых двух причин. Этим же объясняется и то, что при постепенном уменьшении сопротивления нагрузки  ток увеличивается лишь до критического значения
ток увеличивается лишь до критического значения  , а затем при дальнейшем уменьшении сопротивления нагрузки ток начинает уменьшаться. Наконец, ток нагрузки при коротком замыкании
, а затем при дальнейшем уменьшении сопротивления нагрузки ток начинает уменьшаться. Наконец, ток нагрузки при коротком замыкании  . Дело в том, что с увеличением тока усиливается размагничивание генератора (усиление реакции якоря и уменьшение тока возбуждения), машина переходит в ненасыщенное состояние, при котором даже небольшое уменьшение сопротивления нагрузки вызывает резкое уменьшение ЭДС машины (см. рис. 28.5, б). Так как ток определяется напряжением на выводах генератора и сопротивлением нагрузки
. Дело в том, что с увеличением тока усиливается размагничивание генератора (усиление реакции якоря и уменьшение тока возбуждения), машина переходит в ненасыщенное состояние, при котором даже небольшое уменьшение сопротивления нагрузки вызывает резкое уменьшение ЭДС машины (см. рис. 28.5, б). Так как ток определяется напряжением на выводах генератора и сопротивлением нагрузки  , т. е.
, т. е.  ,то при токах нагрузки
,то при токах нагрузки  , когда напряжение генератора уменьшается медленнее, чем убывает сопротивление нагрузки, происходит рост тока нагрузки. После того как
, когда напряжение генератора уменьшается медленнее, чем убывает сопротивление нагрузки, происходит рост тока нагрузки. После того как  , дальнейшее уменьшение сопровождается уменьшением тока нагрузки, так как в этом случае напряжение убывает быстрее, чем уменьшается сопротивление нагрузки .
, дальнейшее уменьшение сопровождается уменьшением тока нагрузки, так как в этом случае напряжение убывает быстрее, чем уменьшается сопротивление нагрузки .

Рис. 28.7. Внешняя характеристика генератора параллельного возбуждения
Таким образом, короткое замыкание, вызванное медленным уменьшением сопротивления нагрузки, не опасно для генератора параллельного возбуждения. Но при внезапном к.з. магнитная система генератора не успевает размагнититься и ток  достигает опасных для машины значений
достигает опасных для машины значений  (кривая 2). При таком резком возрастании тока нагрузки на валу генератора возникает значительный тормозящий момент [см. (25.24)], а на коллекторе появляется сильное искрение, переходящее в круговой огонь. Поэтому необходимо защищать генератор от перегрузки и к.з. посредством плавких предохранителей или же применением релейной защиты.
(кривая 2). При таком резком возрастании тока нагрузки на валу генератора возникает значительный тормозящий момент [см. (25.24)], а на коллекторе появляется сильное искрение, переходящее в круговой огонь. Поэтому необходимо защищать генератор от перегрузки и к.з. посредством плавких предохранителей или же применением релейной защиты.
Генераторы параллельного возбуждения широко применяют в установках постоянного тока, так как отсутствие возбудителя выгодно отличает эти генераторы от генераторов независимого возбуждения. Номинальное изменение напряжения генератора параллельного возбуждения [см. (28.9)] составляет 10—30%.
§
Генератор смешанного возбуждения (рис. 28.8, а) имеет параллельную и последовательную обмотки возбуждения. Поток возбуждения создается в основном параллельной обмоткой. Последовательная обмотка обычно включается согласно с параллельной (чтобы МДС обмоток складывались), что обеспечивает получение жесткой внешней характеристики генератора.
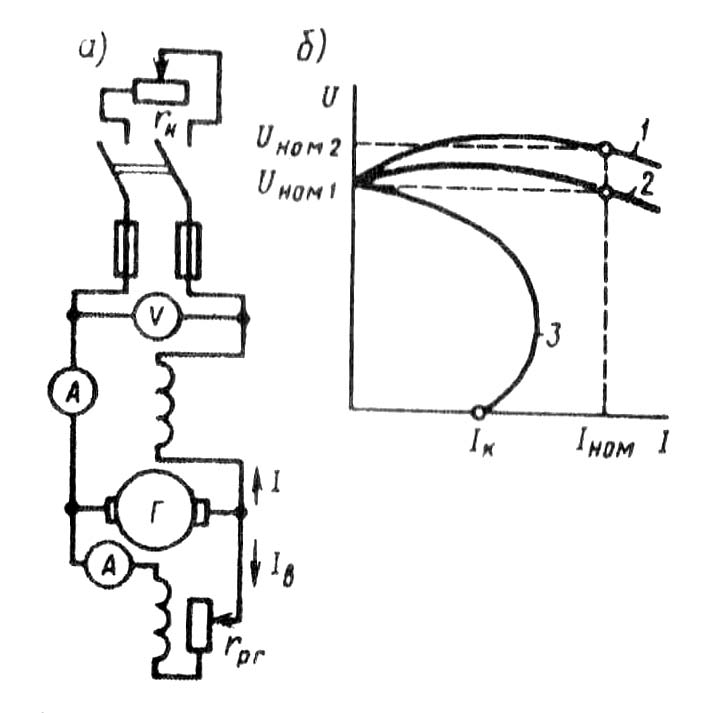
Рис. 28.8. Схема включения генератора смешанного возбуждения (а)и его внешние характеристики (б)
В режиме х.х. генератор имеет только параллельное возбуждение, так как  . С появлением нагрузки возникает МДС последовательной обмотки возбуждения, которая, подмагничивая машину, компенсирует размагничивающее действие реакции якоря и падение напряжения в якоре.
. С появлением нагрузки возникает МДС последовательной обмотки возбуждения, которая, подмагничивая машину, компенсирует размагничивающее действие реакции якоря и падение напряжения в якоре.
Внешняя характеристика в этом случае становится наиболее жесткой (рис. 28.8, б, кривая 2), т. е. напряжение на зажимах генератора при увеличении тока остается почти неизменным. Если же требуется, чтобы напряжение на зажимах потребителя (в конце линии) оставалось практически неизменным, то число витков последовательной обмотки увеличивают так, чтобы МДС этой обмотки компенсировала еще и падение напряжения в проводах линии (кривая /).
При встречном включении обмоток возбуждения напряжение генератора с ростом тока нагрузки резко уменьшается (кривая 3), что объясняется размагничивающим действием последовательной обмотки возбуждения, МДС которой направлена против МДС параллельной обмотки. Встречное включение обмоток применяют лишь в генераторах специального назначения, например в сварочных, где необходимо получить круто падающую внешнюю характеристику.
Генераторы смешанного возбуждения с согласным включением обмоток возбуждения применяют для питания силовой нагрузки в случаях, когда требуется постоянство напряжения в линии.
Контрольные вопросы
1. Какие характеристики определяют свойства генераторов постоянного тока?
2. Почему у генератора параллельного возбуждения изменение напряжения при
сбросе нагрузки больше, чем у генератора независимого возбуждения?
3. Каковы условия самовозбуждения генераторов постоянного тока?
4. При каком включении обмоток возбуждения генератора смешанного возбуждения внешняя характеристика получается более «жесткой»?
Глава 29
Основные понятия
Коллекторные машины обладают свойством обратимости, т. е. они могут работать как в режиме генератора, так и в режиме двигателя. Поэтому если машину постоянного тока подключить к источнику энергии постоянного тока, то в обмотке возбуждения и в обмотке якоря машины появятся токи. Взаимодействие тока якоря с полем возбуждения создает на якоре электромагнитный момент М, который является не тормозящим, как это имело место в генераторе, а вращающим.
Под действием электромагнитного момента якоря машина начнет вращаться, т. е. машина будет работать в режиме двигателя, потребляя из сети электрическую энергию и преобразуя ее в механическую. В процессе работы двигателя его якорь вращается в магнитном поле. В обмотке якоря индуцируется ЭДС  ,направление которой можно определить по правилу «правой руки». По своей природе она не отличается от ЭДС, наводимой в обмотке якоря генератора. В двигателе же ЭДС направлена против тока
,направление которой можно определить по правилу «правой руки». По своей природе она не отличается от ЭДС, наводимой в обмотке якоря генератора. В двигателе же ЭДС направлена против тока  , и поэтому ее называют противо электродвижущей силой (противо-ЭДС) якоря (рис. 29.1).
, и поэтому ее называют противо электродвижущей силой (противо-ЭДС) якоря (рис. 29.1).

Рис. 29.1. Направление противо-ЭДС в обмотке якоря двигателя
Для двигателя, работающего с постоянной частотой вращения,
 . (29.1)
. (29.1)
Из (29.1) следует, что подведенное к двигателю напряжение уравновешивается противо-ЭДС обмотки якоря и падением напряжения в цепи якоря. На основании (29.1) ток якоря
 . (29.2)
. (29.2)
Умножив обе части уравнения (29.1) на ток якоря , получим уравнение мощности для цепи якоря:
 , (29.3)
, (29.3)
где  — мощность в цепи обмотки якоря;
— мощность в цепи обмотки якоря;  — мощность электрических потерь в цепи якоря.
— мощность электрических потерь в цепи якоря.
Для выяснения сущности выражения  проделаем следующее преобразование:
проделаем следующее преобразование:
 ,
,
или
 .
.
Но, согласно (25.24),

тогда
 , (29.4)
, (29.4)
где  — угловая частота вращения якоря;
— угловая частота вращения якоря;  — электромагнитная мощность двигателя.
— электромагнитная мощность двигателя.
Следовательно, выражение представляет собой электромаг нитную мощность двигателя.
Преобразовав выражение (29.3) с учетом (29.4), получим
 .
.
Анализ этого уравнения показывает, что с увеличением нагрузки на вал двигателя, т. е. с увеличением электромагнитного момента М, возрастает мощность в цепи обмотки якоря , т. е. мощность на входе двигателя. Но так как напряжение, подводимое к двигателю, поддерживается неизменным  , то увеличение нагрузки двигателя сопровождается ростом тока в обмотке якоря .
, то увеличение нагрузки двигателя сопровождается ростом тока в обмотке якоря .
В зависимости от способа возбуждения двигатели постоянного тока, так же как и генераторы, разделяют на двигатели с возбуждением от постоянных магнитов (магнитоэлектрические) и с электромагнитным возбуждением. Последние в соответствии со схемой включения обмотки возбуждения относительно обмотки якоря подразделяют на двигатели параллельного (шунтовые), последовательного (сериесные) и смешанного (компаундные) возбуждения.
В соответствии с формулой ЭДС  частота вращения двигателя (об/мин)
частота вращения двигателя (об/мин)
 .
.
Подставив значение  из (29.1), получим (об/мин)
из (29.1), получим (об/мин)
 , (29.5)
, (29.5)
т. е. частота вращения двигателя прямо пропорциональна напряжению и обратно пропорциональна магнитному потоку возбуждения. Физически это объясняется тем, что повышение напряжения U или уменьшение потока Ф вызывает увеличение разности  ; это, в свою очередь, ведет к росту тока [см. (29.2)]. Вследствие этого возросший ток повышает вращающий момент, и если при этом нагрузочный момент остается неизменным, то частота вращения двигателя увеличивается.
; это, в свою очередь, ведет к росту тока [см. (29.2)]. Вследствие этого возросший ток повышает вращающий момент, и если при этом нагрузочный момент остается неизменным, то частота вращения двигателя увеличивается.
Из (29.5) следует, что регулировать частоту вращения двигателя можно изменением либо напряжения U , подводимого к двигателю, либо основного магнитного потока Ф, либо электрического сопротивления в цепи якоря  .
.
Направление вращения якоря зависит от направлений магнитного потока возбуждения Ф и тока в обмотке якоря. Поэтому, изменив направление какой-либо из указанных величин, можно изменить направление вращения якоря. Следует иметь в виду, что переключение общих зажимов схемы у рубильника не дает изменения направления вращения якоря, так как при этом одновременно изменяется направление тока и в обмотке якоря, и в обмотке возбуждения.
Пуск двигателя
Ток якоря двигателя определяется формулой (29.2). Если принять U и  неизменными, то ток зависит от противо-ЭДС . Наибольшего значения ток достигает при пуске двигателя в ход. В начальный момент пуска якорь двигателя неподвижен
неизменными, то ток зависит от противо-ЭДС . Наибольшего значения ток достигает при пуске двигателя в ход. В начальный момент пуска якорь двигателя неподвижен  и в его обмотке не индуцируется ЭДС
и в его обмотке не индуцируется ЭДС  . Поэтому при непосредственном подключении двигателя к сети в обмотке его якоря возникает пусковой ток
. Поэтому при непосредственном подключении двигателя к сети в обмотке его якоря возникает пусковой ток
 . (29.6)
. (29.6)
Обычно сопротивление невелико, поэтому значение пускового тока достигает недопустимо больших значений, в 10—20 раз превышающих номинальный ток двигателя.
Такой большой пусковой ток весьма опасен для двигателя. Во-первых, он может вызвать в машине круговой огонь, а во-вторых, при таком токе в двигателе развивается чрезмерно большой пусковой момент, который оказывает ударное действие на вращающиеся части двигателя и может механически их разрушить. И наконец, этот ток вызывает резкое падение напряжения в сети, что неблагоприятно отражается на работе других потребителей, включенных в эту сеть. Поэтому пуск двигателя непосредственным подключением в сеть (безреостатный пуск) обычно применяют для двигателей мощностью не более 0,7—1,0 кВт. В этих двигателях благодаря повышенному сопротивлению обмотки якоря и небольшим вращающимся массам значение пускового тока лишь в 3—5 раз превышает номинальный, что не представляет опасности для двигателя. Что же касается двигателей большей мощности, то при их пуске для ограничения пускового тока используют пусковые реостаты (ПР), включаемые последовательно в цепь якоря (реостатный пуск).
Перед пуском двигателя необходимо рычаг Р реостата поставить на холостой контакт О (рис. 29.2). Затем включают рубильник, переводят рычаг на первый промежуточный контакт 1 и цепь якоря двигателя оказывается подключенной к сети через наибольшее сопротивление реостата  .
.

Рис. 29.2. Схема включения пускового реостата
Одновременно через рычаг Р и шину Ш к сети подключается обмотка возбуждения, ток в которой в течение всего периода пуска не зависит от положения рычага Р, так как сопротивление шины по сравнению с сопротивлением обмотки возбуждения пренебрежимо мало.
Пусковой ток якоря при полном сопротивлении пускового реостата
 . (29.7)
. (29.7)
С появлением тока в цепи якоря  возникает пусковой момент
возникает пусковой момент  , под действием которого начинается вращение якоря. По мере нарастания частоты вращения увеличивается противо-ЭДС , что ведет к уменьшению пускового тока и пускового момента.
, под действием которого начинается вращение якоря. По мере нарастания частоты вращения увеличивается противо-ЭДС , что ведет к уменьшению пускового тока и пускового момента.
По мере разгона якоря двигателя рычаг пускового реостата переключают в положения 2, 3 и т. д. В положении 5 рычага реостата пуск двигателя заканчивается  . Сопротивление пускового реостата выбирают обычно таким, чтобы наибольший пусковой ток превышал номинальный не более чем в 2—3 раза.
. Сопротивление пускового реостата выбирают обычно таким, чтобы наибольший пусковой ток превышал номинальный не более чем в 2—3 раза.
Так как вращающий момент двигателя М прямо пропорционален потоку Ф [см. (25.24)], то для облегчения пуска двигателя параллельного и смешанного возбуждения сопротивление реостата в цепи возбуждения следует полностью вывести  . Поток возбуждения Ф в этом случае получает наибольшее значение и двигатель развивает необходимый вращающий момент при меньшем токе якоря.
. Поток возбуждения Ф в этом случае получает наибольшее значение и двигатель развивает необходимый вращающий момент при меньшем токе якоря.
Для пуска двигателей большей мощности применять пусковые реостаты нецелесообразно, так как это вызвало бы значительные потери энергии. Кроме того, пусковые реостаты были бы громоздкими. Поэтому в двигателях большой мощности применяют безреостатный пуск двигателя путем понижения напряжения. Примерами этого являются пуск тяговых двигателей электровоза переключением их с последовательного соединения при пуске на параллельное при нормальной работе (см. § 29.6) или пуск двигателя в схеме «генератор—двигатель» (см. § 29.4).
§
Схема включения в сеть двигателя параллельного возбуждения показана на рис. 29.3, а. Характерной особенностью этого двигателя является то, что ток в обмотке возбуждения (ОВ) не зависит от тока нагрузки (тока якоря). Реостат в цепи возбуждения служит для регулирования тока в обмотке возбуждения и магнитного потока главных полюсов.
Эксплуатационные свойства двигателя определяются его ра бочими характеристиками, под которыми понимают зависимость частоты вращения n, тока I, полезного момента M 2, вращающего момента M от мощности на валу двигателя Р2при  и
и  (рис. 29.3, 6).
(рис. 29.3, 6).
Для анализа зависимости и  , которую обычно называют скоростной характеристикой, обратимся к формуле (29.5), из которой видно, что при неизменном напряжении U на частоту вращения влияют два фактора: падение напряжения в цепи якоря
, которую обычно называют скоростной характеристикой, обратимся к формуле (29.5), из которой видно, что при неизменном напряжении U на частоту вращения влияют два фактора: падение напряжения в цепи якоря  и поток возбуждения Ф. При увеличении нагрузки уменьшается числитель
и поток возбуждения Ф. При увеличении нагрузки уменьшается числитель  , при этом вследствие реакции якоря уменьшается и знаменатель Ф. Обычно ослабление потока, вызванное реакцией якоря, невелико и первый фактор влияет на частоту вращения сильнее, чем второй. В итоге частота вращения двигателя с ростом нагрузки Р2уменьшается, а график приобретает падающий вид с небольшой выпуклостью, обращенной к оси абсцисс. Если же реакция якоря в двигателе сопровождается более значительным ослаблением потока Ф, то частота вращения с увеличением нагрузки будет возрастать, как это показано штриховой кривой на рис. 29.3, б. Однако такая зависимость является нежелательной, так как она, как правило, не удовлетворяет условию устойчивой работы двигателя: с ростом нагрузки на двигатель возрастает частота вращения, что ведет к дополнительному росту нагрузки и т. д., т. е. частота вращения n двигателя неограниченно увеличивается и двигатель идет «в разнос». Чтобы обеспечить характеристике частоты вращения форму падающей кривой, в некоторых двигателях параллельного возбуждения применяют легкую (с небольшим числом витков) последовательную обмотку возбуждения, которую называют стабилизирующей обмоткой. При включении этой обмотки согласованно с параллельной обмоткой возбуждения ее МДС компенсирует размагничивающее действие реакции якоря так, что поток Ф во всем диапазоне нагрузок остается практически неизменным.
, при этом вследствие реакции якоря уменьшается и знаменатель Ф. Обычно ослабление потока, вызванное реакцией якоря, невелико и первый фактор влияет на частоту вращения сильнее, чем второй. В итоге частота вращения двигателя с ростом нагрузки Р2уменьшается, а график приобретает падающий вид с небольшой выпуклостью, обращенной к оси абсцисс. Если же реакция якоря в двигателе сопровождается более значительным ослаблением потока Ф, то частота вращения с увеличением нагрузки будет возрастать, как это показано штриховой кривой на рис. 29.3, б. Однако такая зависимость является нежелательной, так как она, как правило, не удовлетворяет условию устойчивой работы двигателя: с ростом нагрузки на двигатель возрастает частота вращения, что ведет к дополнительному росту нагрузки и т. д., т. е. частота вращения n двигателя неограниченно увеличивается и двигатель идет «в разнос». Чтобы обеспечить характеристике частоты вращения форму падающей кривой, в некоторых двигателях параллельного возбуждения применяют легкую (с небольшим числом витков) последовательную обмотку возбуждения, которую называют стабилизирующей обмоткой. При включении этой обмотки согласованно с параллельной обмоткой возбуждения ее МДС компенсирует размагничивающее действие реакции якоря так, что поток Ф во всем диапазоне нагрузок остается практически неизменным.

Рис. 29.3. Схема двигателя параллельного возбуждения (  )
)
и его рабочие характеристики (  )
)
Изменение частоты вращения двигателя при переходе от номинальной нагрузки к х.х., выраженное в процентах, называют номинальным изменением частоты вращения:
 , (29.8)
, (29.8)
где  — частота вращения двигателя в режиме х.х.
— частота вращения двигателя в режиме х.х.
Обычно для двигателей параллельного возбуждения  , поэтому характеристику частоты вращения двигателя параллельного возбуждения называют жесткой.
, поэтому характеристику частоты вращения двигателя параллельного возбуждения называют жесткой.
Зависимость полезного момента  от нагрузки установлена формулой
от нагрузки установлена формулой  . При
. При  график
график  имел бы вид прямой. Однако с увеличением нагрузки частота вращения двигателя снижается, и поэтому зависимость
имел бы вид прямой. Однако с увеличением нагрузки частота вращения двигателя снижается, и поэтому зависимость  криволинейна.
криволинейна.
При  вращающий момент двигателя
вращающий момент двигателя  . Так как рабочие характеристики двигателя строят при условии
. Так как рабочие характеристики двигателя строят при условии  , что обеспечивает постоянство магнитных потерь в двигателе, то момент х.х.
, что обеспечивает постоянство магнитных потерь в двигателе, то момент х.х.  . Поэтому график зависимости
. Поэтому график зависимости  проходит параллельно кривой Если принять поток
проходит параллельно кривой Если принять поток  , то график является в то же время выражением зависимости
, то график является в то же время выражением зависимости  ,так как
,так как  .
.
Для получения аналитического выражения механической ха рактеристики  преобразуем выражение (29.5):
преобразуем выражение (29.5):
 ; (29.9)
; (29.9)
подставив в него из (25.24) значение тока якоря
 , (29.10)
, (29.10)
получим
 , (29.11)
, (29.11)
где — частота вращения в режиме х.х.;  — изменение частоты вращения, вызванное изменением нагрузки на валу двигателя.
— изменение частоты вращения, вызванное изменением нагрузки на валу двигателя.
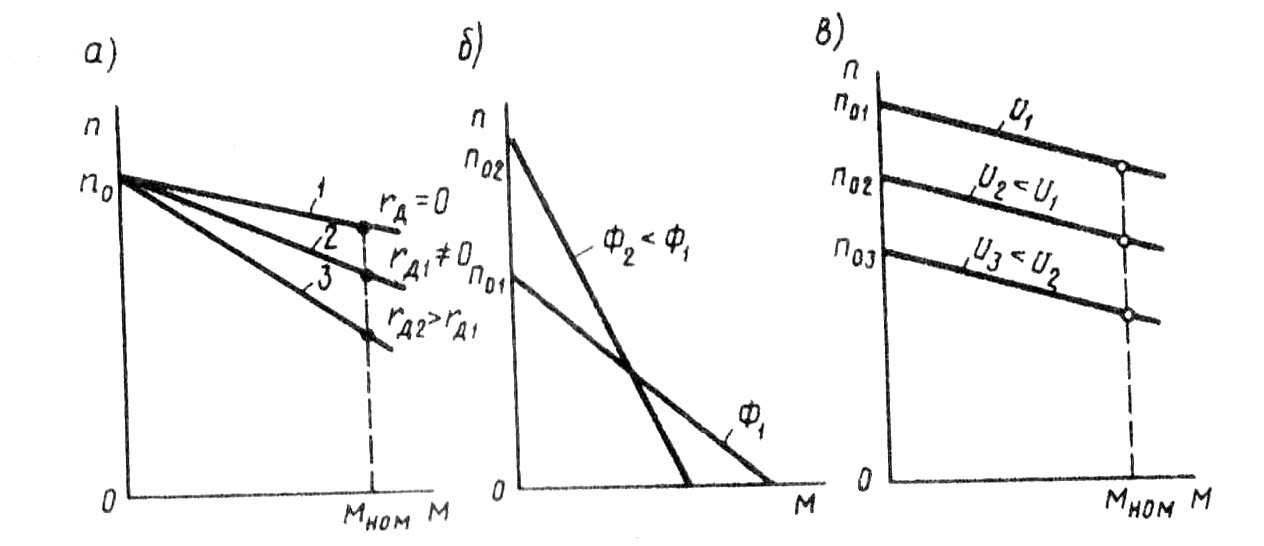
Рис. 29.4. Механические характеристики двигателя параллельного возбуждения:
а — при введении в цепь якоря добавочного сопротивления;
б — при изменении основного магнитного потока;
в — при изменении напряжения в цепи якоря
Если пренебречь реакцией якоря, то (так как  ) можно принять
) можно принять  . Тогда механическая характеристика двигателя параллельного возбуждения представляет собой прямую линию, несколько наклоненную к оси абсцисс (рис. 29.4, а). Угол наклона механической характеристики тем больше, чем больше значение сопротивления, включенного в цепь якоря. Механическую характеристику двигателя при отсутствии дополнительного сопротивления в цепи якоря называют естественной (прямая 1). Механические характеристики двигателя, полученные при введении дополнительного сопротивления в цепь якоря, называют искусственными (прямые 2 и 3).
. Тогда механическая характеристика двигателя параллельного возбуждения представляет собой прямую линию, несколько наклоненную к оси абсцисс (рис. 29.4, а). Угол наклона механической характеристики тем больше, чем больше значение сопротивления, включенного в цепь якоря. Механическую характеристику двигателя при отсутствии дополнительного сопротивления в цепи якоря называют естественной (прямая 1). Механические характеристики двигателя, полученные при введении дополнительного сопротивления в цепь якоря, называют искусственными (прямые 2 и 3).
Вид механической характеристики зависит также и от значения основного магнитного потока Ф. Так, при уменьшении Ф увеличивается частота вращения х.х.  и одновременно увеличивается
и одновременно увеличивается  , т. е. увеличиваются оба слагаемых уравнения (29.11). Это приводит к резкому увеличению наклона механической характеристики, т. е. к уменьшению ее жесткости (рис. 29.4, б).
, т. е. увеличиваются оба слагаемых уравнения (29.11). Это приводит к резкому увеличению наклона механической характеристики, т. е. к уменьшению ее жесткости (рис. 29.4, б).
При изменении напряжения на якоре U меняется частота вращения , а остается неизменной. В итоге жесткость механической характеристики (если пренебречь влиянием реакции якоря) не меняется (рис. 29.4, в), т. е. характеристики смещаются по высоте, оставаясь параллельными друг другу.
§
Способы регулирования частоты вращения двигателей оцениваются следующими показателями: плавностью регулирования; диапазоном регулирования, определяемым отношением наибольшей частоты вращения к наименьшей; экономичностью регулирования, определяемой стоимостью регулирующей аппаратуры и потерями электроэнергии в ней.
Из (29.5) следует, что регулировать частоту вращения двигателя параллельного возбуждения можно изменением сопротивления в цепи якоря, изменением основного магнитного потока Ф, изменением напряжения в цепи якоря.
Введение дополнительного сопротивления в цепь якоря. Дополнительное сопротивление (реостат  ) включают в цепь якоря аналогично пусковому реостату (ПР). Однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока.
) включают в цепь якоря аналогично пусковому реостату (ПР). Однако в отличие от последнего оно должно быть рассчитано на продолжительное протекание тока.
При включении сопротивления в цепь якоря выражение частоты (29.5) принимает вид
 , (29.12)
, (29.12)
где  — частота вращения в режиме х.х.;
— частота вращения в режиме х.х.;
 — изменение частоты вращения, вызванное падением напряжения в цепи якоря.
— изменение частоты вращения, вызванное падением напряжения в цепи якоря.
С увеличением возрастает  , что ведет к уменьшению частоты вращения. Зависимость
, что ведет к уменьшению частоты вращения. Зависимость  иллюстрируется также и механическими характеристиками двигателя параллельного возбуждения (рис. 29.4, а): с повышением увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу
иллюстрируется также и механическими характеристиками двигателя параллельного возбуждения (рис. 29.4, а): с повышением увеличивается наклон механических характеристик, а частота вращения при заданной нагрузке на валу  уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате
уменьшается. Этот способ обеспечивает плавное регулирование частоты вращения в широком диапазоне (только в сторону уменьшения частоты от номинальной), однако он неэкономичен из-за значительных потерь электроэнергии в регулировочном реостате  , которые интенсивно растут с увеличением мощности двигателя.
, которые интенсивно растут с увеличением мощности двигателя.
Изменение основного магнитного потока. Этот способ регулирования в двигателе параллельного возбуждения реализуется посредством реостата в цепи обмотки возбуждения (см. рис. 29.3, а). Так, при уменьшении сопротивления реостата возрастает магнитный поток обмотки возбуждения, что сопровождается понижением частоты вращения [см. (29.5)]. При увеличении частота вращения растет. Зависимость частоты вращения от тока возбуждения выражается регулировочной характеристикой двигателя  при
при  и
и  .
.
Из выражения (29.5) следует, что с уменьшением магнитного потока Ф частота вращения увеличивается по гиперболическому закону (рис. 29.5, ). Но одновременно уменьшение Ф ведет к росту тока якоря  . При потоке
. При потоке  ток якоря достигает значения
ток якоря достигает значения  ,т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю
,т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю  . В этих условиях частота вращения двигателя достигает максимума
. В этих условиях частота вращения двигателя достигает максимума  . При дальнейшем уменьшении потока
. При дальнейшем уменьшении потока  частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока второе слагаемое выражения (29.9) нарастает быстрее первого.
частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока второе слагаемое выражения (29.9) нарастает быстрее первого.
При небольшом нагрузочном моменте на валу двигателя максимальная частота вращения во много раз превосходит номинальную частоту вращения двигателя  и является недопустимой по условиям механической прочности двигателя, т. е. может привести к его «разносу». Учитывая это, при выборе реостата необходимо следить за тем, чтобы при полностью введенном его сопротивлении частота вращения двигателя не превысила допустимого значения.
и является недопустимой по условиям механической прочности двигателя, т. е. может привести к его «разносу». Учитывая это, при выборе реостата необходимо следить за тем, чтобы при полностью введенном его сопротивлении частота вращения двигателя не превысила допустимого значения.
Например, для двигателей серии 2П (см. § 29.9) допускается превышение частоты вращения над номинальной не более чем в 2—3 раза. Необходимо также следить за надежностью электрических соединений в цепи обмотки возбуждения двигателя, так как при разрыве этой цепи магнитный поток уменьшается до значения потока остаточного магнетизма , при котором частота вращения может достигнуть опасного значения.
Вид регулировочных характеристик  зависит от значения нагрузочного момента
зависит от значения нагрузочного момента  на валу двигателя: с ростом
на валу двигателя: с ростом  максимальная частота вращения уменьшается (рис. 29.5, б).
максимальная частота вращения уменьшается (рис. 29.5, б).

Рис. 29.5. Регулировочные характеристики двигателя параллельного возбуждения
Недостаток рассмотренного способа регулирования частоты вращения состоит в том, что при изменении магнитного потока Ф меняется угол наклона механической характеристики двигателя.
Рассмотренный способ регулирования частоты вращения прост и экономичен, так как в двигателях параллельного возбуждения ток  , а поэтому потери в регулировочном реостате
, а поэтому потери в регулировочном реостате  невелики.
невелики.
Однако диапазон регулирования обычно составляет  . Объясняется это тем, что нижний предел частоты вращения обусловлен насыщением машины, ограничивающим значение магнитного потока Ф, а верхний предел частоты опасностью «разноса» двигателя и усилением влияния реакции якоря, искажающее действие которого при ослаблении основною магнитного потока Ф усиливается и ведет к искрению на коллекторе или же к появлению кругового огня (см. § 27.5).
. Объясняется это тем, что нижний предел частоты вращения обусловлен насыщением машины, ограничивающим значение магнитного потока Ф, а верхний предел частоты опасностью «разноса» двигателя и усилением влияния реакции якоря, искажающее действие которого при ослаблении основною магнитного потока Ф усиливается и ведет к искрению на коллекторе или же к появлению кругового огня (см. § 27.5).
Изменение напряжения в цепи якоря. Регулирование частоты вращения двигателя изменением питающего напряжения применяется лишь при  , т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
, т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Частота вращения в режиме х.х. пропорциональна напряжению, а  от напряжения не зависит [см. (29.1 1)], поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6, ).
от напряжения не зависит [см. (29.1 1)], поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6, ).
Для управления двигателями большой мощности целесообразно применять генератор постоянного тока независимого возбуждения; привод осуществляется посредством приводного двигателя (ПД), в качестве которого обычно используют трехфазный двигатель переменного тока. Для питания постоянным током цепей возбуждения генератора Г и двигателя Д используется возбудитель В — генератор постоянного тока, напряжение на выходе которого поддерживается неизменным. Описанная схема управления двигателем постоянного тока (рис. 29.6, б)известна под названием системы «генератор — двигатель» (Г—Д).

Рис. 29.6. Схемы включения двигателей постоянного тока при регулировании частоты вращения изменением напряжения в цепи якоря
Изменение напряжения в цепи якоря позволяет регулировать частоту вращения двигателя вниз от номинальной, так как напряжение свыше номинального недопустимо. При необходимости регулировать частоту вращения вверх от номинальной можно воспользоваться изменением тока возбуждения двигателя.
Изменение направления вращения (реверс) двигателя, работающего по системе Г—Д, осуществляется изменением направления тока в цепи возбуждения генератора Г переключателем П, т. е. переменой полярности напряжения на его зажимах. Если двигатель постоянного тока работает в условиях резко переменной нагрузки, то для смягчения колебаний мощности, потребляемой ПД из трехфазной сети, на вал ПД помещают маховик М, который запасает энергию в период уменьшения нагрузки на двигатель Д и отдает ее в период интенсивной нагрузки двигателя.
Регулирование частоты вращения изменением напряжения в цепи якоря обеспечивает плавное экономичное регулирование в широком диапазоне  . Наибольшая частота вращения здесь ограничивается условиями коммутации, а наименьшая — условиями охлаждения двигателя (см. § 31.3).
. Наибольшая частота вращения здесь ограничивается условиями коммутации, а наименьшая — условиями охлаждения двигателя (см. § 31.3).
Еще одним достоинством рассматриваемого способа регулирования является то, что он допускает безреостатный пуск двигателя при пониженном напряжении.
Импульсное регулирование частоты вращения. Сущность этого способа регулирования иллюстрируется схемой, изображенной на рис. 29.7, а. Цепь обмотки якоря двигателя параллельного (независимого) возбуждения периодически прерывается ключом К. Во время замыкания цепи якоря на время  к обмотке якоря подводится напряжение
к обмотке якоря подводится напряжение  и ток в ней достигает значения
и ток в ней достигает значения  . Затем ключом К цепь якоря размыкают и ток в ней убывает, достигая к моменту следующего замыкания цепи значения
. Затем ключом К цепь якоря размыкают и ток в ней убывает, достигая к моменту следующего замыкания цепи значения  (при размыкании ключа К ток в обмотке якоря замыкается через диод VD). При следующем замыкании ключа К ток достигает значения
(при размыкании ключа К ток в обмотке якоря замыкается через диод VD). При следующем замыкании ключа К ток достигает значения  и т. д. Таким образом, к обмотке якоря подводится некоторое среднее напряжение
и т. д. Таким образом, к обмотке якоря подводится некоторое среднее напряжение
 , (29.13)
, (29.13)
где Т– отрезок времени между двумя следующими друг за другом импульсами напряжения (рис. 29.7, б);  — коэффициент управления.
— коэффициент управления.
При этом в обмотке якоря проходит ток, среднее значение которого  .
.
При импульсном регулировании частота вращения двигателя
 . (29.14)
. (29.14)
Таким образом, импульсное регулирование частоты вращения аналогично регулированию изменением подводимого к цепи якоря напряжения. С целью уменьшения пульсаций тока в цепи якоря включена катушка индуктивности (дроссель)  , а частота подачи импульсов равна 200—400 Гц.
, а частота подачи импульсов равна 200—400 Гц.
На рис. 29.7, в представлена одна из возможных схем импульсного регулирования, где в качестве ключа применен управляемый диод — тиристор VS . Открывается тиристор подачей кратковременного импульса от генератора импульсов (ГИ) на управляющий электрод (УЭ) тиристора. Цепь  ,шунтирующая тиристор, служит для запирания последнего в период между двумя управляющими импульсами. Происходит это следующим образом: при открывании тиристора конденсатор С перезаряжается через контур
,шунтирующая тиристор, служит для запирания последнего в период между двумя управляющими импульсами. Происходит это следующим образом: при открывании тиристора конденсатор С перезаряжается через контур  и создает на силовых электродах тиристора напряжение, обратное напряжению сети, которое прекращает протекание тока через тиристор. Параметрами цепи определяется время (с) открытого состояния тиристора:
и создает на силовых электродах тиристора напряжение, обратное напряжению сети, которое прекращает протекание тока через тиристор. Параметрами цепи определяется время (с) открытого состояния тиристора:  . Здесь
. Здесь  выражается в генри (Гн); С — в фарадах (Ф).
выражается в генри (Гн); С — в фарадах (Ф).

Рис. 29.7. Импульсное регулирование частоты вращения двигателя постоянного тока
Значение среднего напряжения  регулируется изменением частоты следования управляющих импульсов от генератора импульсов на тиристор VS .
регулируется изменением частоты следования управляющих импульсов от генератора импульсов на тиристор VS .
Жесткие механические характеристики и возможность плавного регулирования частоты вращения в широком диапазоне определили области применения двигателей параллельного возбуждения в станочных приводах, вентиляторах, а также во многих других случаях регулируемого электропривода, где требуется устойчивая работа при колебаниях нагрузки.
§
В двигателях параллельного возбуждения при неизменном токе в обмотке возбуждения  магнитный поток изменяется при нагрузке весьма незначительно, поэтому с некоторым приближением можно принять
магнитный поток изменяется при нагрузке весьма незначительно, поэтому с некоторым приближением можно принять  . В этом случае электромагнитный момент [см. (25.24)] пропорционален току в цепи якоря и механическая характеристика
. В этом случае электромагнитный момент [см. (25.24)] пропорционален току в цепи якоря и механическая характеристика  может быть представлена зависимостью
может быть представлена зависимостью  (рис. 29.8). Если эту характеристику продолжить в обе стороны за пределы осей координат (прямая 1), то можно показать, что электрическая машина в зависимости от величины и знака внешнего момента, действующего на ее вал со стороны связанного с ним механизма, может работать в трех режимах: двигательном, тормозном и генераторном.
(рис. 29.8). Если эту характеристику продолжить в обе стороны за пределы осей координат (прямая 1), то можно показать, что электрическая машина в зависимости от величины и знака внешнего момента, действующего на ее вал со стороны связанного с ним механизма, может работать в трех режимах: двигательном, тормозном и генераторном.
При работе двигателя без нагрузки ток в цепи якоря  небольшой. При этом частота вращения
небольшой. При этом частота вращения  (точка А). Затем с появлением на валу двигателя нагрузочного момента, противодействующего вращающему, ток в цепи якоря возрастает, а частота вращения уменьшается. Если увеличить противодействующий момент до значения, при котором якорь двигателя остановится (точка В), то ЭДС
(точка А). Затем с появлением на валу двигателя нагрузочного момента, противодействующего вращающему, ток в цепи якоря возрастает, а частота вращения уменьшается. Если увеличить противодействующий момент до значения, при котором якорь двигателя остановится (точка В), то ЭДС  и ток двигателя достигает значения
и ток двигателя достигает значения  . Если двигатель применяют для привода механизма, нагрузочный момент которого может быть больше вращающегося (например, привод барабана, на который наматывается трос с грузом), то при последующем увеличении нагрузочного момента этого механизма якорь машины вновь начнет вращаться, но теперь уже в другую сторону. Теперь момент, действующий на вал электрической машины со стороны нагрузочного механизма, будет вращающим, а электромагнитный момент машины — тормозящим, т. е. электрическая машина перейдет в тормозной режим. При работе машины в этом режиме ЭДС якоря действует согласованно с напряжением, т. е.
. Если двигатель применяют для привода механизма, нагрузочный момент которого может быть больше вращающегося (например, привод барабана, на который наматывается трос с грузом), то при последующем увеличении нагрузочного момента этого механизма якорь машины вновь начнет вращаться, но теперь уже в другую сторону. Теперь момент, действующий на вал электрической машины со стороны нагрузочного механизма, будет вращающим, а электромагнитный момент машины — тормозящим, т. е. электрическая машина перейдет в тормозной режим. При работе машины в этом режиме ЭДС якоря действует согласованно с напряжением, т. е.  .
.
При использовании машины в тормозном режиме необходимо принять меры для ограничения тока якоря. С этой целью в цепь якоря включают добавочное сопротивление, величина которого обеспечивает получение искусственной характеристики двигателя, пересекающейся с осью абсцисс при токе якоря  (штриховая прямая).
(штриховая прямая).
Если при работе двигателя в режиме х.х. к его валу приложить момент, направленный в сторону вращения якоря, то частота вращения, а следовательно, и ЭДС  начнут возрастать. Когда ЭДС
начнут возрастать. Когда ЭДС  , машина не будет потреблять тока из сети (точка С) и частота вращения якоря достигает значения, называемого погранич ной частотой вращения
, машина не будет потреблять тока из сети (точка С) и частота вращения якоря достигает значения, называемого погранич ной частотой вращения 

Рис. 29.8. Режимы работы машины постоянного тока:
1 — с параллельным (независимым) возбуждением;
2 — со смешанным возбуждением;
3 — с последовательным возбуждением
При дальнейшем увеличении внешнего момента на валу машины ЭДС станет больше напряжения, а в цепи якоря опять возникает ток, но другого направления. При этом машина перейдет в генераторный режим: механическая энергия, затрачиваемая на вращение якоря, будет преобразовываться в электрическую и поступать в сеть.
Перевод машины из двигательного в генераторный режим используют для торможения двигателя, так как в генераторном режиме электромагнитный момент является тормозящим (рекуперативное торможение).
§
В этом двигателе обмотка возбуждения включена последовательно в цепь якоря (рис. 29.9, а), поэтому магнитный поток Ф в нем зависит от тока нагрузки  . При небольших нагрузках магнитная система машины не насыщена и зависимость магнитного потока от тока нагрузки прямо пропорциональна, т. е.
. При небольших нагрузках магнитная система машины не насыщена и зависимость магнитного потока от тока нагрузки прямо пропорциональна, т. е.  . В этом случае найдем по (25.24) электромагнитный момент:
. В этом случае найдем по (25.24) электромагнитный момент:

Формула частоты вращения (29.5) примет вид
 . (29.15)
. (29.15)
Здесь  — коэффициент пропорциональности.
— коэффициент пропорциональности.
На рис. 29.9, б представлены рабочие характеристики  и
и  двигателя последовательного возбуждения. При больших нагрузках наступает насыщение магнитной системы двигателя. В этом случае магнитный поток при возрастании нагрузки практически не изменяется и характеристики двигателя приобретают почти прямолинейный характер. Характеристика частоты вращения двигателя последовательного возбуждения показывает, что частота вращения двигателя значительно меняется при изменениях нагрузки. Такую характеристику принято называть мягкой.
двигателя последовательного возбуждения. При больших нагрузках наступает насыщение магнитной системы двигателя. В этом случае магнитный поток при возрастании нагрузки практически не изменяется и характеристики двигателя приобретают почти прямолинейный характер. Характеристика частоты вращения двигателя последовательного возбуждения показывает, что частота вращения двигателя значительно меняется при изменениях нагрузки. Такую характеристику принято называть мягкой.

Рис. 29.9. Двигатель последовательного возбуждения:
а — принципиальная схема; б — рабочие характеристики; в — механические характеристики; 1 — естественная характеристика; 2 — искусственная характеристика
При уменьшении нагрузки двигателя последовательного возбуждения частота вращения резко увеличивается и при нагрузке меньше 25% от номинальной может достигнуть опасных для двигателя значений («разнос»). Поэтому работа двигателя последовательного возбуждения или его пуск при нагрузке на валу меньше 25% от номинальной недопустима.
Для более надежной работы вал двигателя последовательного возбуждения должен быть жестко соединен с рабочим механизмом посредством муфты и зубчатой передачи. Применение ременной передачи недопустимо, так как при обрыве или сбросе ремня может произойти «разнос» двигателя. Учитывая возможность работы двигателя на повышенных частотах вращения, двигатели последовательного возбуждения, согласно ГОСТу, подвергают испытанию в течение 2 мин на превышение частоты вращения на 20% сверх максимальной, указанной на заводском щите, но не меньше чем на 50% сверх номинальной.
Механические характеристики двигателя последовательного возбуждения  представлены на рис. 29.9, в. Резко падающие кривые механических характеристик (естественная 1 и искусственная 2) обеспечивают двигателю последовательного возбуждения устойчивую работу при любой механической нагрузке. Свойство этих двигателей развивать большой вращающий момент, пропорциональный квадрату тока нагрузки, имеет важное значение, особенно в тяжелых условиях пуска и при перегрузках, так как с постепенным увеличением нагрузки двигателя мощность на его входе растет медленнее, чем вращающий момент. Эта особенность двигателей последовательного возбуждения является одной из причин их широкого применения в качестве тяговых двигателей на транспорте, а также в качестве крановых двигателей в подъемных установках, т. е. во всех случаях электропривода с тяжелыми условиями пуска и сочетания значительных нагрузок на вал двигателя с малой частотой вращения.
представлены на рис. 29.9, в. Резко падающие кривые механических характеристик (естественная 1 и искусственная 2) обеспечивают двигателю последовательного возбуждения устойчивую работу при любой механической нагрузке. Свойство этих двигателей развивать большой вращающий момент, пропорциональный квадрату тока нагрузки, имеет важное значение, особенно в тяжелых условиях пуска и при перегрузках, так как с постепенным увеличением нагрузки двигателя мощность на его входе растет медленнее, чем вращающий момент. Эта особенность двигателей последовательного возбуждения является одной из причин их широкого применения в качестве тяговых двигателей на транспорте, а также в качестве крановых двигателей в подъемных установках, т. е. во всех случаях электропривода с тяжелыми условиями пуска и сочетания значительных нагрузок на вал двигателя с малой частотой вращения.
Номинальное изменение частоты вращения двигателя последовательного возбуждения
 , (29.16)
, (29.16)
где  — частота вращения при нагрузке двигателя, составляющей 25% от номинальной.
— частота вращения при нагрузке двигателя, составляющей 25% от номинальной.
Частоту вращения двигателей последовательного возбуждения можно регулировать изменением либо напряжения , либо магнитного потока обмотки возбуждения. В первом случае в цепь якоря последовательно включают регулировочный реостат  (рис. 29.10, а). С увеличением сопротивления этого реостата уменьшаются напряжение на входе двигателя и частота его вращения. Этот метод регулирования применяют главным образом в двигателях небольшой мощности. В случае значительной мощности двигателя этот способ неэкономичен из-за больших потерь энергии в
(рис. 29.10, а). С увеличением сопротивления этого реостата уменьшаются напряжение на входе двигателя и частота его вращения. Этот метод регулирования применяют главным образом в двигателях небольшой мощности. В случае значительной мощности двигателя этот способ неэкономичен из-за больших потерь энергии в  . Кроме того, реостат ,рассчитываемый на рабочий ток двигателя, получается громоздким и дорогостоящим.
. Кроме того, реостат ,рассчитываемый на рабочий ток двигателя, получается громоздким и дорогостоящим.
При совместной работе нескольких однотипных двигателей частоту вращения регулируют изменением схемы их включения относительно друг друга (рис. 29.10, б). Так, при параллельном включении двигателей каждый из них оказывается под полным напряжением сети, а при последовательном включении двух двигателей на каждый двигатель приходится половина напряжения сети. При одновременной работе большего числа двигателей возможно большее количество вариантов включения. Этот способ регулирования частоты вращения применяют в электровозах, где установлено несколько одинаковых тяговых двигателей.
Изменение подводимого к двигателю напряжения возможнопри питании двигателя от источника постоянного тока с регулируемым напряжением (например, по схеме, аналогичной рис. 29.6, а). При уменьшении подводимого к двигателю напряжения его механические характеристики смещаются вниз, практически не меняя своей кривизны (рис. 29.11).

Рис. 29.11. Механические характеристики двигателя последовательного возбуждения при изменении подводимого напряжения
Регулировать частоту вращения двигателя изменением магнитного потока можно тремя способами: шунтированием обмотки возбуждения реостатом , секционированием обмотки возбуждения и шунтированием обмотки якоря реостатом  . Включение реостата , шунтирующего обмотку возбуждения (рис. 29.10, в), а также уменьшение сопротивления этого реостата ведет к снижению тока возбуждения
. Включение реостата , шунтирующего обмотку возбуждения (рис. 29.10, в), а также уменьшение сопротивления этого реостата ведет к снижению тока возбуждения  , а следовательно, к росту частоты вращения. Этот способ экономичнее предыдущего (см. рис. 29.10, а), применяется чаще и оценивается коэффициентом регулирования
, а следовательно, к росту частоты вращения. Этот способ экономичнее предыдущего (см. рис. 29.10, а), применяется чаще и оценивается коэффициентом регулирования  . Обычно сопротивление реостата принимается таким, чтобы
. Обычно сопротивление реостата принимается таким, чтобы  .
.
При секционировании обмотки возбуждения (рис. 29.10, г) отключение части витков обмотки сопровождается ростом частоты вращения. При шунтировании обмотки якоря реостатом (см. рис. 29.10, в) увеличивается ток возбуждения  , что вызывает уменьшение частоты вращения. Этот способ регулирования, хотя и обеспечивает глубокую регулировку, неэкономичен и применяется очень редко.
, что вызывает уменьшение частоты вращения. Этот способ регулирования, хотя и обеспечивает глубокую регулировку, неэкономичен и применяется очень редко.

Рис. 29.10. Регулирование частоты вращения двигателей последовательного возбуждения
§
В машинах постоянного тока, как и в других электрических машинах, имеют место магнитные, электрические и механические потери (составляющие группу основных потерь) и добавочные потери.
Магнитные потери  происходят только в сердечнике якоря, так как только этот элемент магнитопровода машины постоянного тока подвергается перемагничиванию. Величина магнитных потерь, состоящих из потерь от гистерезиса и потерь от вихревых токов, зависит от частоты перемагничивания
происходят только в сердечнике якоря, так как только этот элемент магнитопровода машины постоянного тока подвергается перемагничиванию. Величина магнитных потерь, состоящих из потерь от гистерезиса и потерь от вихревых токов, зависит от частоты перемагничивания  значений магнитной индукции в зубцах и спинке якоря, толщины листов электротехнической стали, ее магнитных свойств и качества изоляции этих листов в пакете якоря.
значений магнитной индукции в зубцах и спинке якоря, толщины листов электротехнической стали, ее магнитных свойств и качества изоляции этих листов в пакете якоря.
Электрические потери в коллекторной машине постоянного тока обусловлены нагревом обмоток и щеточного контакта. Потери в цепи возбуждения определяются потерями в обмотке возбуждения и в реостате, включенном в цепь возбуждения:
 (29.18)
(29.18)
Здесь  — напряжение на зажимах цепи возбуждения. Потери в обмотках цепи якоря
— напряжение на зажимах цепи возбуждения. Потери в обмотках цепи якоря
 (29.19)
(29.19)
где сопротивление обмоток в цепи якоря  , приведенное к расчетной рабочей температуре
, приведенное к расчетной рабочей температуре  , определяется по (13.4) с учетом данных, приведенных в § 13.1 и § 8.4.
, определяется по (13.4) с учетом данных, приведенных в § 13.1 и § 8.4.
Электрические потери также имеют место и в контакте щеток:
 (29-20)
(29-20)
где  — переходное падение напряжения, В, на щетках обеих полярностей, принимаемое в соответствии с маркой щеток по табл. 27.1.
— переходное падение напряжения, В, на щетках обеих полярностей, принимаемое в соответствии с маркой щеток по табл. 27.1.
Электрические потери в цепи якоря и в щеточном контакте зависят от нагрузки машины, поэтому эти потери называют переменными.
Механические потери. В машине постоянного тока механические потери складываются из потерь от трения щеток о коллектор
 (29.21)
(29.21)
трения в подшипниках  и на вентиляцию
и на вентиляцию 
 (29.22)
(29.22)
где  — коэффициент трения щеток о коллектор
— коэффициент трения щеток о коллектор 
 — поверхность соприкосновения всех щеток с коллектором, м2;
— поверхность соприкосновения всех щеток с коллектором, м2;  — удельное давление, Н/м2, щетки [для машин общего назначения =(2÷3)·104 Н/м2];
— удельное давление, Н/м2, щетки [для машин общего назначения =(2÷3)·104 Н/м2];
окружная скорость коллектора (м/с) диаметром  (м)
(м)
 . (29.23)
. (29.23)
Механические и магнитные потери при стабильной частоте вращения  можно считать постоянными.
можно считать постоянными.
Сумма магнитных и механических потерь составляют потери х.х.:
 . (29.24)
. (29.24)
Если машина работает в качестве двигателя параллельного возбуждения в режиме х.х., то она потребляет из сети мощность
 . (29.25)
. (29.25)
Однако ввиду небольшого значения тока  электрические потери
электрические потери  и
и  весьма малы и обычно не превышают 3% потерь
весьма малы и обычно не превышают 3% потерь  . Поэтому, не допуская заметной ошибки, можно записать
. Поэтому, не допуская заметной ошибки, можно записать  , откуда потери х.х.
, откуда потери х.х.
 . (29.26)
. (29.26)
Таким образом, потери х.х. (магнитные и механические) могут быть определены экспериментально.
В машинах постоянного тока имеется ряд трудно учитываемых потерь — добавочных. Эти потери складываются из потерь от вихревых токов в меди обмоток, потерь в уравнительных соединениях, в стали якоря из-за неравномерного распределения индукции при нагрузке, в полюсных наконечниках, обусловленных пульсацией основного потока из-за наличия зубцов якоря, и др. Добавочные потери составляют хотя и небольшую, но не поддающуюся точному учету величину. Поэтому, согласно ГОСТу, в машинах без компенсационной обмотки значение добавочных потерь  принимают равным 1% от полезной мощности для генераторов или 1% от подводимой мощности для двигателей. В машинах с компенсационной обмоткой значение добавочных потерь принимают равным соответственно 0,5%.
принимают равным 1% от полезной мощности для генераторов или 1% от подводимой мощности для двигателей. В машинах с компенсационной обмоткой значение добавочных потерь принимают равным соответственно 0,5%.
Мощность (Вт) на входе машины постоянного тока (подводимая мощность):
для генератора (механическая мощность)
 (29.27)
(29.27)
где — вращающий момент приводного двигателя, Н∙м;
для двигателя (электрическая мощность)
 . (29.28)
. (29.28)
Мощность (Вт) на выходе машины (полезная мощность):
для генератора (электрическая мощность)
 ; (29.29)
; (29.29)
для двигателя (механическая мощность)
 . (29.30)
. (29.30)
Здесь и — момент на валу электрической машины, Н-м; — частота вращения, об/мин.
Коэффициент полезного действия. Коэффициент полезного действия электрической машины представляет собой отношение мощностей отдаваемой (полезной)  к подводимой (потребляемой)
к подводимой (потребляемой)  ,:
,:
 .
.
Определив суммарную мощность вышеперечисленных потерь
 , (29.31)
, (29.31)
можно подсчитать КПД машины по одной из следующих формул:
для генератора
 ; (29.32)
; (29.32)
для двигателя
 . (29.33)
. (29.33)
Обычно КПД машин постоянного тока составляет 0,75—0,90 для машин мощностью от 1 до 100 кВт и 0,90—0,97 для машин мощностью свыше 100 кВт. Намного меньше КПД машин постоянного тока малой мощности. Например, для машин мощностью от 5 до 50 Вт  = 0,15÷0,50. Указанные значения КПД соответствуют номинальной нагрузке машины. Зависимость КПД машины постоянного тока от нагрузки выражается графиком
= 0,15÷0,50. Указанные значения КПД соответствуют номинальной нагрузке машины. Зависимость КПД машины постоянного тока от нагрузки выражается графиком  , форма которого характерна для электрических машин (рис. 29.13).
, форма которого характерна для электрических машин (рис. 29.13).

Рис. 29.13. Зависимость 
Коэффициент полезного действия электрической машины можно определять: а) методом непосредственной нагрузки по результатам измерений подведенной и отдаваемой мощностей; б) косвенным методом по результатам измерений потерь.
Метод непосредственной нагрузки применим только для машин малой мощности, для остальных случаев применяется косвенный метод, как более точный и удобный. Установлено, что при  > 80 % измерять КПД методом непосредственной нагрузки нецелесообразно, так как он дает большую ошибку, чем косвенный метод.
> 80 % измерять КПД методом непосредственной нагрузки нецелесообразно, так как он дает большую ошибку, чем косвенный метод.
Существует несколько косвенных способов определения КПД. Наиболее прост способ холостого хода двигателя, когда потребляемая машиной постоянного тока мощность затрачивается только на потери х.х. [см. (29.26)]. Что же касается электрических потерь, то их определяют расчетным путем после предварительного измерения электрических сопротивлений обмоток и приведения их к рабочей температуре.
Пример 29.1. Двигатель постоянного тока параллельного возбуждения (см. рис. 29.3) включен в сеть с напряжением 220 В. При номинальной нагрузке и частоте вращения  об/мин он потребляет ток
об/мин он потребляет ток  = 43 А. Определить КПД двигателя при номинальной нагрузке, если ток х.х.
= 43 А. Определить КПД двигателя при номинальной нагрузке, если ток х.х.  = 4 А, а сопротивления цепей якоря
= 4 А, а сопротивления цепей якоря  = 0,25 Ом и возбуждения = 150 Ом. При каком добавочном сопротивлении
= 0,25 Ом и возбуждения = 150 Ом. При каком добавочном сопротивлении  , включенном последовательно в цепь якоря, частота вращения двигателя будет = 1000 об/мин (нагрузочный момент
, включенном последовательно в цепь якоря, частота вращения двигателя будет = 1000 об/мин (нагрузочный момент  )?
)?
Решение. Ток возбуждения  = 220/150 =1,47 А. Ток якоря в режиме х.х.
= 220/150 =1,47 А. Ток якоря в режиме х.х.  = 4 – 1,47 = 2,53 А. Ток якоря номинальный
= 4 – 1,47 = 2,53 А. Ток якоря номинальный  = 43 – 1,47 = 41,53 А. Сумма магнитных и механических потерь
= 43 – 1,47 = 41,53 А. Сумма магнитных и механических потерь  = 220- 2,53 -2,532– 0,25 = 555 Вт. Электрические потери в цепи возбуждения по (29.18)
= 220- 2,53 -2,532– 0,25 = 555 Вт. Электрические потери в цепи возбуждения по (29.18)
 Вт.
Вт.
Электрические потери в цепи якоря по (29.19)
 Вт.
Вт.
Электрические потери в щеточном контакте по (29.20)
 Вт.
Вт.
Подводимая к двигателю мощность по (29.28)
 Вт.
Вт.
Добавочные потери
 Вт.
Вт.
Суммарные потери по (29.31)
 Вт.
Вт.
Полезная мощность двигателя
 Вт.
Вт.
КПД двигателя при номинальной нагрузке
 .
.
Из выражения (29.5) получим

ЭДС якоря при частоте вращения 1000 об/мин по (25.20)
 В.
В.
Так как ток якоря прямо пропорционален моменту  [см (25.24)], то при
[см (25.24)], то при  сила тока после включения останется прежней
сила тока после включения останется прежней  А. Из выражения тока якоря (29.2) получим
А. Из выражения тока якоря (29.2) получим
 Ом.
Ом.
Электрические потери в добавочном сопротивлении
 Вт.
Вт.
Полезная мощность двигателя при частоте вращения 1000 об/мин
 Вт.
Вт.
Расчет полезной мощности является приближенным, так как он не учитывает уменьшение механических потерь двигателя при его переходе на меньшую частоту вращения.
§ 29.9. Машины постоянного тока серий 4П и 2П
Стремительное развитие автоматизации производства привело к необходимости создания двигателей постоянного тока с широким диапазоном регулирования частоты вращения (до 1:1000) с хорошими динамическими свойствами. Этим требованиям соответствуют двигатели серии 4П. Серия охватывает двигатели с высотой оси вращения от 80 до 450 мм следующих модификаций.
Двигатели типа 4ПО и 4ПБ охватывают диапазон мощности от 0,126 до 5,5 кВт при номинальной частоте вращения от 750 до 3000 об/мин. Двигатели допускают регулирование частоты вращения вниз от номинальной уменьшением напряжения на обмотке якоря при снижении тока до 0,5 . А так же вверх от номинальной (уменьшением тока возбуждения) в пределах максимальной частоты вращения, которая превышает номинальную в среднем в 1,35— 1,8 раза.
Конструкция этих двигателей унифицирована с асинхронными двигателями серии 4А. Это позволило применить для производства некоторых узлов двигателей типа 4ПО и 4ПБ технологическое оборудование, применяемое в производстве двигателей серии 4А. В унифицированной конструкции этих двигателей магнитопровод статора неявнополюсный с распределенными в пазах обмотками. Так, обмотка возбуждения (независимая) укладывается в два паза в пределах каждого полюсного деления, остальные пазы занимает компенсационная обмотка. В двигателях типа 4ПО и 4ПБ и двигателях серии 4А одинакового габарита могут быть применены одинаковые станины, задние подшипниковые шиты, коробки выводов, подшипники и т. п.
Применение распределенных обмоток на статоре двигателей типа 4ПО и 4ПБ улучшило процесс охлаждения и позволило увеличить токовые нагрузки на обмотки возбуждения и компенсационную. Кроме того, распределенная конструкция обмоток статора способствует лучшей компенсации реакции якоря и улучшению коммутации.
Двигатели постоянного тока типов 4ПО и 4ПБ имеют закрытое исполнение со степенью защиты I Р44 со способами охлаждения I С0141 (наружный обдув) в двигателях типа 4ПО (рис. 29.14) и I С0041 (естественное охлаждение) в двигателях типа 4ПБ.

Рис. 29.14. Двигатель постоянного тока типа 4IIО унифицированной конструкции;
/ — корпус; 2 — магнитопровод статора с распределенными обмотками; 3 — шит подшипниковый передний; 4 — сердечник якоря; 5 — вентилятор, 6 — кожух вентилятора; 7 — коробка выводов; 8 — коллектор, 9 — траверса.
Широкорегулируемые двигатели типа 4ПФ предназначены для привода станков с программным управлением, роботизированных производственных комплексов. Исполнение двигателей по степени защиты IР23 (защищенные), способ охлаждения IС06 (независимая вентиляция). Двигатели охватывают номинальные мощности от 2,0 до 250 кВт при высоте оси вращения от 112 до 250 мм. Напряжение питания 220 и 440 В. Регулирование частоты вращения возможно изменением подводимого к обмотке якоря напряжения от 0 до 460 В. Допускается также регулирование частоты вращения ослаблением поля возбуждения (уменьшением тока в обмотке возбуждения).
Статор двигателей восьмигранный шихтованный, явнополюсный (рис. 29.15). Пакет статора запрессован между двумя нажимными плитами толщиной 10 мм. Подшипниковые шиты литые чугунные.

Рис. 29.15. Двигатель постоянного тока типа 4ПФ:
1 — траверса; 2 — вентилятор наружный; 3 — коллектор; 4 — обмоткодержатель якоря; 5 — нажимная плита статора; 6 — подшипниковый щит; 7 — обмотка компенсационная; 8 — дополнительный полюс; 9 — статор; 10 — обмотка независимого возбуждения; 11 — балансировочное кольцо
Катушки возбуждения намотаны на главные полюса, катушки дополнительной обмотки надеты на добавочные полюса, компенсационная обмотка расположена в пазах полюсных наконечников.
Наружный вентилятор может быть снабжен фильтром для очистки воздуха от пыли и мелких частиц. Вентилятор расположен на боковой или торцевой поверхности со стороны коллектора.
Крупные двигатели 4П для тяжелых условий эксплуатации предназначены для привода крупных металлорежущих станков, механизмов металлургического производства, с частыми пусками, остановками, реверсами, набросами и неравномерностью нагрузки. Двигатели изготавливаются с высотой оси вращения 355 и 450 мм мощностью от 110 до 800 кВт; напряжение питания 440 и 600 В. Возбуждение независимое напряжением 220 В. Вентиляция от постороннего вентилятора. Двигатели имеют степень защиты IР44 и IР23.
§
Универсальными называют коллекторные двигатели, которые могут работать как от сети постоянного, так и от сети однофазного переменного тока.
Коллекторный двигатель постоянного тока в принципе может работать от сети переменного тока, так как при переходе от положительного полупериода переменного напряжения к отрицательному направление электромагнитного момента сохраняется неизменным. Объясняется это тем, что при переходе к отрицательному полупериоду почти одновременно с изменением направления тока в обмотке якоря меняется направление тока в обмотке возбуждения, т. е. меняется полярность полюсов.
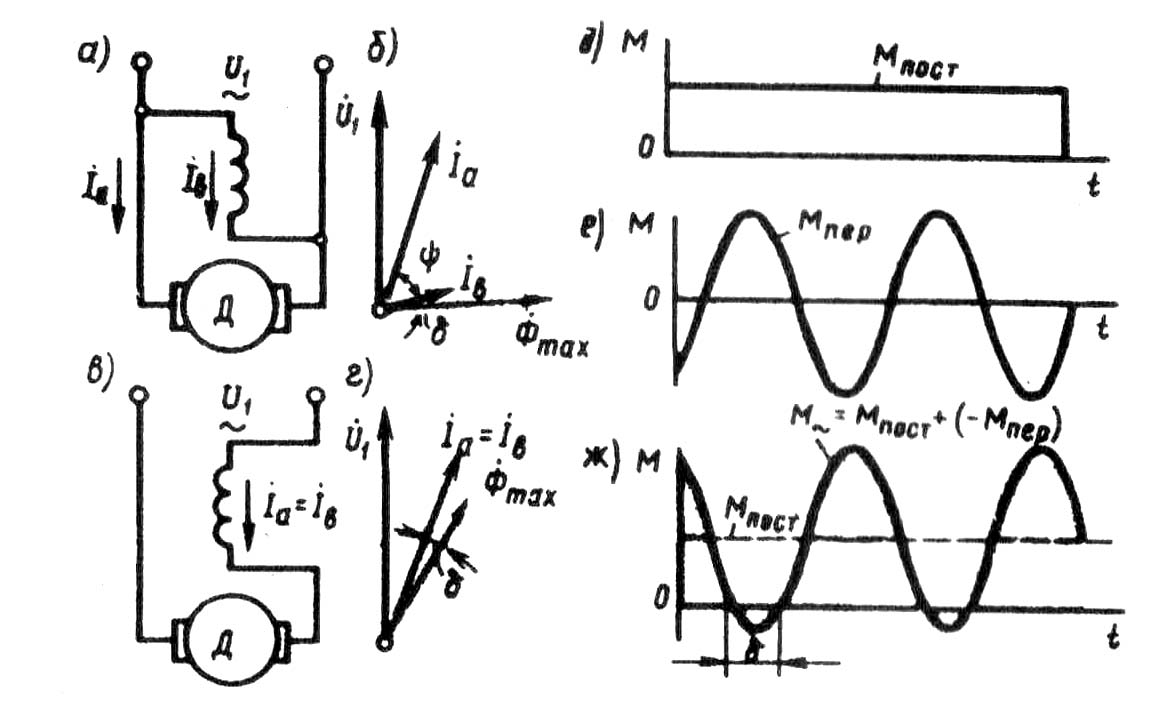
Рис. 29.16. К принципу работы универсального коллекторного двигателя
Однофазные коллекторные двигатели имеют преимущественно последовательное возбуждение. Применение параллельного возбуждения (рис. 29.14,  ) в данном случае ограничивается значительной индуктивностью параллельной обмотки возбуждения, имеющей большое число витков. Это создает значительный фазовый сдвиг между током якоря
) в данном случае ограничивается значительной индуктивностью параллельной обмотки возбуждения, имеющей большое число витков. Это создает значительный фазовый сдвиг между током якоря  и током возбуждения на угол
и током возбуждения на угол  (рис. 29.14, б). Среднее значение электромагнитного момента в этом случае определяется выражением, аналогичным выражению (25.24), но учитывающим угол сдвига между током якоря и магнитным потоком:
(рис. 29.14, б). Среднее значение электромагнитного момента в этом случае определяется выражением, аналогичным выражению (25.24), но учитывающим угол сдвига между током якоря и магнитным потоком:
 , (29.34)
, (29.34)
где  — максимальное значение магнитного потока; — угол сдвига фаз между током якоря и током возбуждения;
— максимальное значение магнитного потока; — угол сдвига фаз между током якоря и током возбуждения;  — угол сдвига фаз между током возбуждения и магнитным потоком, обусловленный наличием магнитных потерь в машине [
— угол сдвига фаз между током возбуждения и магнитным потоком, обусловленный наличием магнитных потерь в машине [  , а следовательно,
, а следовательно,  ].
].
В двигателе последовательного возбуждения (рис. 29.14, в) ток якоря и ток возбуждения совпадают по фазе: = 0 (рис. 29.14, г). Поэтому среднее значение электромагнитного вращающего момента в двигателе последовательного возбуждения  больше, чем в двигателе параллельного возбуждения:
больше, чем в двигателе параллельного возбуждения:
 . (29.35)
. (29.35)
Электромагнитный момент двигателя последовательного возбуждения при работе от сети переменного тока имеет постоянную составляющую  (рис. 29.14, д) и переменную составляющую
(рис. 29.14, д) и переменную составляющую  , изменяющуюся с частотой, равной удвоенной частоте сети
, изменяющуюся с частотой, равной удвоенной частоте сети  (рис. 29.14, е). Результирующий момент этого двигателя является пульсирующим M ~
(рис. 29.14, е). Результирующий момент этого двигателя является пульсирующим M ~ (рис. 29.14, ж): M ~ =
(рис. 29.14, ж): M ~ =  . Небольшие участки графика
. Небольшие участки графика  с отрицательным (тормозящим) моментом обусловлены фазовым сдвигом между векторами магнитного потока
с отрицательным (тормозящим) моментом обусловлены фазовым сдвигом между векторами магнитного потока  и током
и током  (рис. 29.14, г). Пульсации момента M ~практически не нарушают работу двигателя, включенного в сеть переменного тока, так как сглаживаются за счет момента инерции вращающегося якоря.
(рис. 29.14, г). Пульсации момента M ~практически не нарушают работу двигателя, включенного в сеть переменного тока, так как сглаживаются за счет момента инерции вращающегося якоря.
По своей конструкции универсальные коллекторные двигатели отличаются от двигателей постоянного тока тем, что их станина и главные полюсы делаются шихтованными из листовой электротехнической стали. Это дает возможность сократить магнитные потери, которые при работе двигателя от сети переменного тока повышаются, так как переменный ток в обмотке возбуждения вызывает перемагничивание всей магнитной цепи, включая станину и сердечники полюсов.
Основной недостаток однофазных коллекторных двигателей — тяжелые условия коммутации. Дело в том, что в коммутирующих секциях помимо реактивной ЭДС и ЭДС внешнего поля (см. § 27.3) наводится трансформаторная ЭДС  ,действующее значение которой
,действующее значение которой
 . (29.36)
. (29.36)
Эта ЭДС наводится переменным магнитным потоком возбуждения, сцепленным с коммутирующими секциями. Для уменьшения трансформаторной ЭДС необходимо уменьшить поток  , а чтобы мощность двигателя при этом осталась прежней, следует увеличить число полюсов в двигателе.
, а чтобы мощность двигателя при этом осталась прежней, следует увеличить число полюсов в двигателе.
Применение в обмотке якоря двигателя одновитковых секций  также способствует ограничению
также способствует ограничению  ,но при этом увеличивается количество пластин в коллекторе, а следовательно, возрастают его размеры. Применение добавочных полюсов с обмоткой, включенной последовательно в цепь якоря, позволяет добиться полной взаимной компенсации трансформаторной ЭДС только при определенных значениях тока якоря и частоты вращения. При других режимах работы двигателя условия коммутации остаются тяжелыми. Регулировка частоты вращения и реверсирование однофазного коллекторного двигателя выполняются так же, как и в двигателях постоянного тока последовательного возбуждения.
,но при этом увеличивается количество пластин в коллекторе, а следовательно, возрастают его размеры. Применение добавочных полюсов с обмоткой, включенной последовательно в цепь якоря, позволяет добиться полной взаимной компенсации трансформаторной ЭДС только при определенных значениях тока якоря и частоты вращения. При других режимах работы двигателя условия коммутации остаются тяжелыми. Регулировка частоты вращения и реверсирование однофазного коллекторного двигателя выполняются так же, как и в двигателях постоянного тока последовательного возбуждения.
В универсальном коллекторном двигателе стремятся получить примерно одинаковые частоты вращения при номинальной нагрузке, как на постоянном, так и на переменном токе. Достигается это тем, что обмотку возбуждения двигателя выполняют с ответвлениями: при работе двигателя от сети постоянного тока обмотка возбуждения используется полностью, а при работе от сети переменного тока — частично (рис. 29.15, ).
Расхождения в характеристиках двигателя на постоянном и переменном токе объясняются тем, что при работе от сети переменного тока на величину и фазу тока оказывают влияние индуктивные сопротивления обмоток якоря и возбуждения.

Рис. 29.17. Схема соединений и рабочие характеристики универсального коллекторного двигателя
Однако уменьшение числа витков обмотки возбуждения обеспечивает сближение характеристик лишь при нагрузке, близкой к номинальной. На рис. 29.15, б приведены рабочие характеристики универсального коллекторного двигателя типа УМТ-22 (55 Вт, 200 об/мин, 110/127 В). Потребляемый двигателем ток при работе от сети переменного тока больше, чем при работе этого же электродвигателя от сети постоянного тока, так как переменный ток помимо активной имеет еще и реактивную составляющую. Коэффициент полезного действия универсальных двигателей при переменном токе ниже, чем при постоянном, что вызвано повышенными магнитными потерями. Области применения универсальных коллекторных двигателей достаточно широки: их применяют в автоматике, для привода различного электроинструмента, бытовых электроприборов и др.
Контрольные вопросы
1. Какие способы ограничения пускового тока применяются в двигателях постоянного тока?
2. С какой целью при пуске двигателя параллельного возбуждения сопротивление реостата в цепи возбуждения устанавливают минимальным?
3. Сравните двигатели параллельного и последовательного возбуждения по их регулировочным свойствам.
4. Какова разница в конструкции коллекторных двигателей постоянного и переменного тока?
Глава 30
§
Электромашинный усилитель
Электромашинный усилитель (ЭМУ) представляет собой электрическую машину, работающую в генераторном режиме и предназначенную для усиления электрических сигналов. Электромашинные усилители применяются в системах автоматики. Простейший ЭМУ — это генератор постоянного тока независимого возбуждения (см. рис. 28.2, а). Так как напряжение на выходе генератора зависит от тока возбуждения (см. рис. 28.2, б), то, изменяя ток возбуждения, можно управлять напряжением на выходе генератора. Следовательно, сравнительно небольшой мощностью в цепи обмотки возбуждения можно управлять значительной мощностью в цепи якоря.
Электромашинные усилители, выполненные по принципу генератора независимого возбуждения, не нашли широкого применения, так как они не могут обеспечить достаточно большого коэффициента усиления по мощности (не более 80—100), представляющего собой отношение мощности на выходе усилителя к мощности на входе обмотки управления.
Наибольшее распространение в автоматике получили электромашинные усилители поперечного поля. В отличие от обычного генератора постоянного тока в этом ЭМУ основным рабочим потоком является магнитный поток, создаваемый током обмотки якоря, — поперечный поток реакции якоря (см. рис. 26.4, б).
На коллекторе ЭМУ установлено два комплекта щеток: один комплект —  (рис. 30.1, а)— расположен по поперечной оси главных полюсов, т. е. на геометрической нейтрали, а другой —
(рис. 30.1, а)— расположен по поперечной оси главных полюсов, т. е. на геометрической нейтрали, а другой —  по продольной оси главных, полюсов. Щетки
по продольной оси главных, полюсов. Щетки  замкнуты накоротко, а к щеткам
замкнуты накоротко, а к щеткам  подключена рабочая цепь ЭМУ.
подключена рабочая цепь ЭМУ.
Помимо обмотки якоря усилитель имеет одну или несколько обмоток управления  ,компенсационную обмотку (ОК), поперечную подмагничивающую обмотку (ОП) и обмотку добавочных полюсов (ОД). Якорь усилителя приводится во вращение электродвигателем.
,компенсационную обмотку (ОК), поперечную подмагничивающую обмотку (ОП) и обмотку добавочных полюсов (ОД). Якорь усилителя приводится во вращение электродвигателем.
Если к одной из обмоток управления подвести напряжение  , то в этой обмотке появится ток управления
, то в этой обмотке появится ток управления  , который создает МДС обмотки управления
, который создает МДС обмотки управления  . Эта МДС, в свою очередь, создает магнитный поток
. Эта МДС, в свою очередь, создает магнитный поток  , который наведет в обмотке якоря в цепи щеток ЭДС
, который наведет в обмотке якоря в цепи щеток ЭДС  . Электродвижущая сила
. Электродвижущая сила  невелика, но так как щетки замкнуты накоротко, то ЭДС вызовет значительный ток
невелика, но так как щетки замкнуты накоротко, то ЭДС вызовет значительный ток  . Ток в обмотке якоря
. Ток в обмотке якоря  создаст МДС
создаст МДС  и магнитный поток
и магнитный поток  , который направлен по поперечной оси главных полюсов, т. е. по геометрической нейтрали, и неподвижен в пространстве. В обмотке якоря, вращающейся в неподвижном потоке
, который направлен по поперечной оси главных полюсов, т. е. по геометрической нейтрали, и неподвижен в пространстве. В обмотке якоря, вращающейся в неподвижном потоке  ,наводится ЭДС
,наводится ЭДС  ,снимаемая с продольных щеток .
,снимаемая с продольных щеток .
Если к выходным зажимам ЭМУ подключить нагрузку ,то ЭДС создаст в цепи щеток рабочий ток  .
.
Таким образом, небольшая мощность обмотки управления проходит две ступени усиления: сначала эта мощность усиливается на ступени «цепь управления — поперечная цепь», а затем на ступени «поперечная цепь — продольная (рабочая) цепь».
Усиление мощности на каждой ступени характеризуется коэффициентом усиления, который на ступени «цепь управления — поперечная цепь» определяется отношением мощности в поперечной цепи  к мощности управления
к мощности управления  :
:
 . (30.1)
. (30.1)
Коэффициент усиления на ступени «поперечная цепь — продольная (рабочая) цепь» определяется отношением мощностей в этих цепях:
 , (30.2)
, (30.2)
где  — мощность в рабочей цепи усилителя, т. е. в цепи щеток .
— мощность в рабочей цепи усилителя, т. е. в цепи щеток .

Рис. 30.1 ЭМУ поперечного поля:
 — принципиальная схема;
— принципиальная схема;
 — внешние характеристики
— внешние характеристики
Общий коэффициент усиления ЭМУ равен произведению частных коэффициентов усиления:
 . (30.3)
. (30.3)
Коэффициент усиления электромашинных усилителей может достигать 2000—20 000.
Следует помнить, что мощность на выходе ЭМУ  представляет собой преобразованную механическую мощность приводного электродвигателя. Значение этой мощности, которое может достигать более 20 кВт, управляется небольшой мощностью управления (обычно 0,1—1,0 Вт).
представляет собой преобразованную механическую мощность приводного электродвигателя. Значение этой мощности, которое может достигать более 20 кВт, управляется небольшой мощностью управления (обычно 0,1—1,0 Вт).
Обмотка добавочных полюсов (ОД) служит для улучшения коммутации на продольных щетках . Поперечная подмагничивающая обмотка (ОП) усиливает магнитный поток по поперечной оси, что позволяет уменьшить ток в цепи щеток ,следовательно, улучшить коммутацию на этих щетках (в ЭМУ малой мощности эта обмотка отсутствует).
Компенсационная обмотка (ОК), наличие которой в ЭМУ обязательно, устраняет размагничивающее влияние реакции якоря по продольной оси. Дело в том, что ток рабочей цепи ЭМУ (ток нагрузки) создает МДС по продольной оси  ,направленную навстречу МДС обмотки управления
,направленную навстречу МДС обмотки управления  . Эта МДС намного меньше МДС
. Эта МДС намного меньше МДС  ,поэтому даже при небольшой нагрузке усилителя размагничивающее влияние реакции якоря по продольной оси настолько велико, что усилитель размагничивается и напряжение на его выводах падает до нуля. Для устранения этого явления на статоре ЭМУ располагают компенсационную обмотку, включенную последовательно в рабочую цепь якоря. С появлением тока в рабочей цепи возникает МДС компенсационной обмотки
,поэтому даже при небольшой нагрузке усилителя размагничивающее влияние реакции якоря по продольной оси настолько велико, что усилитель размагничивается и напряжение на его выводах падает до нуля. Для устранения этого явления на статоре ЭМУ располагают компенсационную обмотку, включенную последовательно в рабочую цепь якоря. С появлением тока в рабочей цепи возникает МДС компенсационной обмотки  ,направленная по продольной оси встречно МДС реакции якоря . Этим устраняется (компенсируется) размагничивающее влияние реакции якоря по продольной оси. Для полной компенсации необходимо, чтобы МДС и были равны, так как недокомпенсация
,направленная по продольной оси встречно МДС реакции якоря . Этим устраняется (компенсируется) размагничивающее влияние реакции якоря по продольной оси. Для полной компенсации необходимо, чтобы МДС и были равны, так как недокомпенсация  или перекомпенсация
или перекомпенсация  оказывает значительное влияние на магнитный поток
оказывает значительное влияние на магнитный поток  , а следовательно, и на свойства ЭМУ. Однако рассчитать компенсационную обмотку с требуемой точностью практически невозможно, что ведет к необходимости опытной настройки требуемого значения МДС посредством реостата
, а следовательно, и на свойства ЭМУ. Однако рассчитать компенсационную обмотку с требуемой точностью практически невозможно, что ведет к необходимости опытной настройки требуемого значения МДС посредством реостата  ,шунтирующего компенсационную обмотку.
,шунтирующего компенсационную обмотку.
Электромашинные усилители поперечного поля выполняют двухполюсными, при этом каждый из главных полюсов расщепляют на две части 1, между которыми располагают добавочные полюса 2 (рис. 30.2). Обмотки управления 4 выполняют сосредоточенными в виде полюсных катушек, надетых на главные полюса, что же касается компенсационной обмотки 3, то ее делают распределенной, используя для этого пазы в полюсных наконечниках главных полюсов. Этим достигается компенсация продольной реакции якоря по всему периметру статора.

Рис. 30.2. Расположение обмоток ЭМУ на статоре
При мощности до нескольких киловатт ЭМУ выполняют в общем корпусе с приводным двигателем постоянного или переменного тока. При значительной мощности ЭМУ и двигатель выполняют раздельно и монтируют на общей раме.
Рабочие свойства ЭМУ в значительной степени определяются его внешней характеристикой  при
при  и
и  . Напряжение на выходе усилителя
. Напряжение на выходе усилителя
 , (30-4)
, (30-4)
где  сумма электрических сопротивлений в продольной цепи якоря, Ом, включающая в себя сопротивления обмотки якоря ,добавочных полюсов , компенсационной обмотки и щеточного контакта
сумма электрических сопротивлений в продольной цепи якоря, Ом, включающая в себя сопротивления обмотки якоря ,добавочных полюсов , компенсационной обмотки и щеточного контакта  .
.
Ввиду того, что магнитная цепь усилителя не насыщена, напряжение  является линейной функцией тока нагрузки , т. е. внешняя характеристика ЭМУ представляет собой практически прямую линию (рис. 30.1, б).
является линейной функцией тока нагрузки , т. е. внешняя характеристика ЭМУ представляет собой практически прямую линию (рис. 30.1, б).
Угол наклона внешней характеристики к оси абсцисс (жесткость характеристики) зависит от степени компенсации реакции якоря. При полной компенсации МДС компенсационной обмотки равна МДС реакции якоря по продольной оси . В этом случае внешняя характеристика получается достаточно жесткой (кривая 3), так как уменьшение напряжения при увеличении тока нагрузки происходит лишь за счет увеличения падения напряжения в цепи якоря по продольной оси  .
.
При недокомпенсации внешняя характеристика получается менее жесткой (кривая 4). Объясняется это тем, что при недокомпенсации МДС ,возрастая с увеличением тока ,значительно ослабляет магнитный поток обмотки управления , что ведет к заметному уменьшению напряжения на выходе ЭМУ.
внешняя характеристика получается менее жесткой (кривая 4). Объясняется это тем, что при недокомпенсации МДС ,возрастая с увеличением тока ,значительно ослабляет магнитный поток обмотки управления , что ведет к заметному уменьшению напряжения на выходе ЭМУ.
Если в усилителе настроить небольшую перекомпенсацию так, чтобы МДС полностью скомпенсировала не только реакцию якоря по продольной оси, но и падение напряжения , то внешняя характеристика усилителя становится абсолютно жесткой и располагается параллельно оси абсцисс (кривая 2). В этом случае напряжение на выходе ЭМУ остается неизменным во всем диапазоне изменения нагрузки.
так, чтобы МДС полностью скомпенсировала не только реакцию якоря по продольной оси, но и падение напряжения , то внешняя характеристика усилителя становится абсолютно жесткой и располагается параллельно оси абсцисс (кривая 2). В этом случае напряжение на выходе ЭМУ остается неизменным во всем диапазоне изменения нагрузки.
При значительной перекомпенсации внешняя характеристика (кривая 1) приобретает восходящий характер, так как МДС не только компенсирует , но и создает дополнительный продольный поток, который, накладываясь на магнитный поток управления , вызывает увеличение ЭДС  . Работа усилителя с перекомпенсацией становится неустойчивой, так как возникает опасность произвольного самовозбуждения ЭМУ, при котором увеличение напряжения на выходе усилителя вызывает рост тока нагрузки, что ведет к дальнейшему увеличению напряжения, т. е. происходит неограниченное увеличение тока нагрузки. Обычно в усилителе настраивают небольшую недокомпенсацию, при которой увеличение напряжения при уменьшении тока от номинального до нуля составляло бы 12—20%.
. Работа усилителя с перекомпенсацией становится неустойчивой, так как возникает опасность произвольного самовозбуждения ЭМУ, при котором увеличение напряжения на выходе усилителя вызывает рост тока нагрузки, что ведет к дальнейшему увеличению напряжения, т. е. происходит неограниченное увеличение тока нагрузки. Обычно в усилителе настраивают небольшую недокомпенсацию, при которой увеличение напряжения при уменьшении тока от номинального до нуля составляло бы 12—20%.
§
С целью улучшения свойств двигателей постоянного тока были созданы двигатели с бесконтактным коммутатором, называемые бесконтактными двигателями постоянного тока (БДПТ). Отличие БДПТ от коллекторных двигателей традиционной конструкции состоит в том, что у них щеточно-коллекторный узел заменен полупроводниковым коммутатором (инвертором), управляемым сигналами, поступающими с бесконтактного датчика положения ротора. Рабочая обмотка двигателя — обмотка якоря — расположена на сердечнике статора, а постоянный магнит — на роторе.
Вал двигателя Д (рис. 30.4, а)механически соединен с датчиком положения ротора (ДПР), сигнал от которого поступает в блок коммутатора (БК). Подключение секций обмотки якоря к источнику постоянного тока происходит через элементы блока коммутатора (БК). Назначение ДПР — выдавать управляющий сигнал в блок коммутатора в соответствии с положением полюсов постоянного магнита относительно секций обмотки якоря.
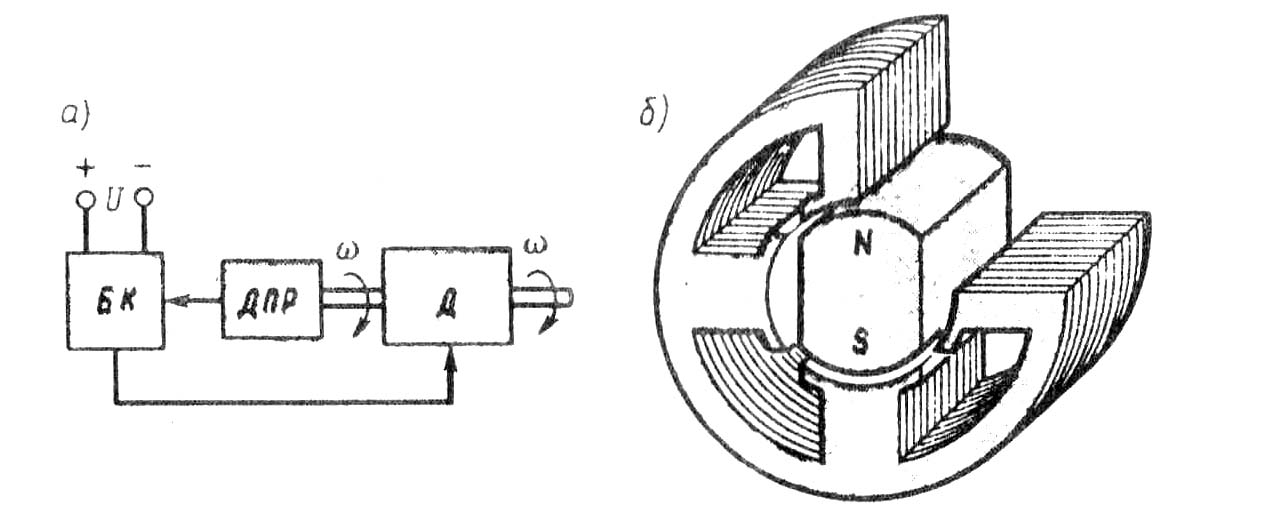
рис. 30.4. Бесконтактный двигатель постоянного тока:
— блок-схема, — магнитная система
В качестве датчиков положения ротора применяют чувствительные различные бесконтактные элементы с минимальными размерами и потребляемой мощностью и большой кратностью минимального и максимального сигналов, чтобы не вызывать нарушений в работе блока коммутатора. Чувствительные элементы ДПР должны надежно работать при внешних воздействиях (температура, влажность, вибрации и т. п.), на которые рассчитан двигатель. Такие свойства присущи ряду чувствительных элементов (датчиков): индуктивных, трансформаторных, магнитодиодов и т. п. Наиболее целесообразно использовать датчики ЭДС Хота (рис. 30.5), представляющие собой тонкую полупроводниковую пластину с нанесенными на ней контактны-
ми площадками, к которым припаяны выводы /—2, подключенные к источнику напряжения  , и выводы 3—4, с которых снимают выходной сигнал
, и выводы 3—4, с которых снимают выходной сигнал  . Если в цепи 1—2 проходит ток , а датчик находится в магнитном поле, вектор индукции В которого перпендикулярен плоскости пластины датчика, то в датчике наводится ЭДС и на выводах 3—4 появляется напряжение . Значение ЭДС зависит от тока
. Если в цепи 1—2 проходит ток , а датчик находится в магнитном поле, вектор индукции В которого перпендикулярен плоскости пластины датчика, то в датчике наводится ЭДС и на выводах 3—4 появляется напряжение . Значение ЭДС зависит от тока  и магнитной индукции В, а полярность — от направления тока в цепи 1—2 и направления вектора магнитной индукции В.
и магнитной индукции В, а полярность — от направления тока в цепи 1—2 и направления вектора магнитной индукции В.

Рис. 30.5. Датчик ЭДС Холла
Рассмотрим работу бесконтактного двигателя постоянного тока, для управления которым применяют датчики Холла и коммутатор, выполненный на транзисторах V Т1—V Т4 (рис. 30.6). Четыре обмотки (фазы) двигателя  расположены на явно выраженных полюсах шихтованного сердечника якоря (см. рис. 30.4, б). Датчики Холла ДХ1 и ДХ2 установлены в пазах полюсных наконечников двух смежных полюсов. Силовые транзисторы V Т1—V Т4 работают в релейном (ключевом) режиме (рис. 30.6). Сигнал на открытие транзистора поступает от соответствующего датчика Холла (датчика положения ротора). Питание датчиков Холла (выводы 1—2)осуществляется от источника напряжением .
расположены на явно выраженных полюсах шихтованного сердечника якоря (см. рис. 30.4, б). Датчики Холла ДХ1 и ДХ2 установлены в пазах полюсных наконечников двух смежных полюсов. Силовые транзисторы V Т1—V Т4 работают в релейном (ключевом) режиме (рис. 30.6). Сигнал на открытие транзистора поступает от соответствующего датчика Холла (датчика положения ротора). Питание датчиков Холла (выводы 1—2)осуществляется от источника напряжением .
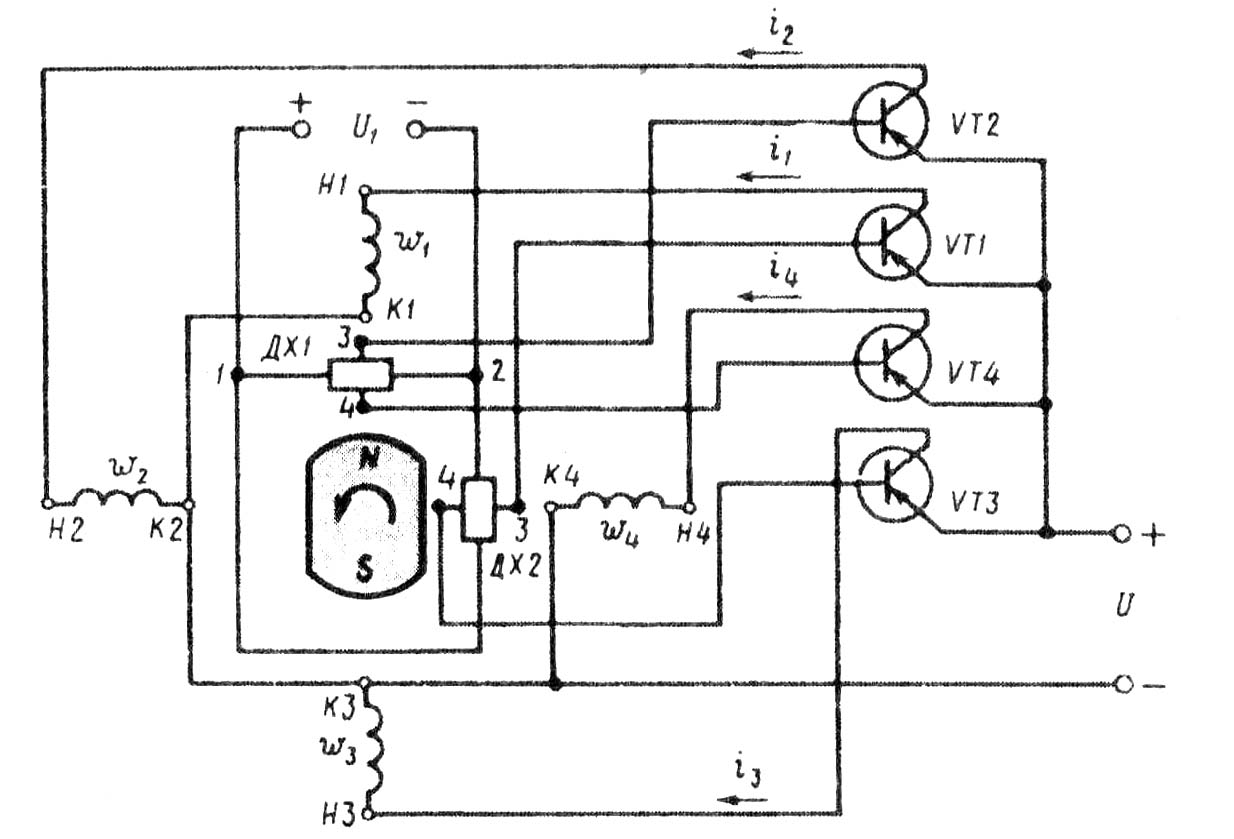
Рис. 30.6. Принципиальная схема БДПТ
Каждая обмотка (фаза) выполнена из двух катушек, расположенных на противолежащих полюсах сердечника статора и соединенных последовательно (рис. 30.7). Если по какой-либо из обмоток (фаз) статора проходит ток от начала Н1—Н4 к концу К1—К4, то полюсы сердечника статора приобретают полярность соответственно S и N.

Рис. 30.7. Расположение обмоток фаз на полюсах статора БДПТ
При положении ротора, показанном на рис. 30.6, в зоне магнитного полюса N находится датчик ДХ1. При этом на выходе датчика появляется сигнал, при котором транзистор V Т2 переходит в открытое состояние. В обмотке (фаза) статора  появляется ток
появляется ток  , протекающий от Н2 к К2. При этом полюсы статора 2 и 4 приобретают полярность S и N (рис. 30.8, ). В результате взаимодействия магнитных полей статора и ротора (постоянного магнита) появляется электромагнитный момент М, вращающий ротор. После поворота ротора относительно оси полюсов статора 1—3 на некоторый угол а против часовой стрелки датчик ДХ2 окажется в зоне магнитного полюса ротора S, при этом по сигналу с датчика ДХ2 включается транзистор V Т3. В фазной катушке
, протекающий от Н2 к К2. При этом полюсы статора 2 и 4 приобретают полярность S и N (рис. 30.8, ). В результате взаимодействия магнитных полей статора и ротора (постоянного магнита) появляется электромагнитный момент М, вращающий ротор. После поворота ротора относительно оси полюсов статора 1—3 на некоторый угол а против часовой стрелки датчик ДХ2 окажется в зоне магнитного полюса ротора S, при этом по сигналу с датчика ДХ2 включается транзистор V Т3. В фазной катушке  возникает ток
возникает ток  и полюсы 3 и / приобретают полярность S и N. При этом магнитный поток статора Ф создается совместным действием МДС обмоток фаз и . Вектор этого потока повернут относительно оси 2—4 на угол 450 (рис. 30.8, б). Ротор, продолжая вращение, занимает положение по оси полюсов статора 2—4. При этом датчик ДХ1 попадает в межполюсное пространство ротора, а датчик ДХ2 останется в зоне полюса S ротора. В результате транзистор V Т2 закрывается, транзистор V ТЗ останется открытым и магнитный поток Ф, создаваемый МДС обмотки фазы , поворачивается относительно оси полюсов 2—4 еще на 450 (рис. 30.8, в). После того как ось вращающегося ротора пересечет ось полюсов статора 2—4, датчики ДХ1 и ДХ2 окажутся в зоне полюса ротора S, что приведет к включению транзисторов V ТЗ и V Т4. Дальнейшую работу элементов схемы БДПТ (рис. 30.8) до завершения вектором потока Ф одного оборота проследим по табл. 30.1 и рис. 30.8, а — з.
и полюсы 3 и / приобретают полярность S и N. При этом магнитный поток статора Ф создается совместным действием МДС обмоток фаз и . Вектор этого потока повернут относительно оси 2—4 на угол 450 (рис. 30.8, б). Ротор, продолжая вращение, занимает положение по оси полюсов статора 2—4. При этом датчик ДХ1 попадает в межполюсное пространство ротора, а датчик ДХ2 останется в зоне полюса S ротора. В результате транзистор V Т2 закрывается, транзистор V ТЗ останется открытым и магнитный поток Ф, создаваемый МДС обмотки фазы , поворачивается относительно оси полюсов 2—4 еще на 450 (рис. 30.8, в). После того как ось вращающегося ротора пересечет ось полюсов статора 2—4, датчики ДХ1 и ДХ2 окажутся в зоне полюса ротора S, что приведет к включению транзисторов V ТЗ и V Т4. Дальнейшую работу элементов схемы БДПТ (рис. 30.8) до завершения вектором потока Ф одного оборота проследим по табл. 30.1 и рис. 30.8, а — з.

Рис. 30.8. Магнитное поле статора в четырехполюсном БДПТ
На рис. 30.9 показано устройство рассмотренного БДПТ. Датчики Холла 3 размещены в специальных пазах полюсных наконечников 1 сердечника статора.

Рис. 30.9. Устройство БДПТ
Постоянный магнит 2 не имеет центрального отверстия для посадки на вал, он закладывается в тонкостенную гильзу и закрывается привариваемыми фланцами двух полуосей. Такая конструкция ротора позволяет избежать выполнения центрального отверстия в постоянном магните, что часто является причиной брака (трещины, сколы и т. п.). Блок коммутатора (БК) расположен на панелях 5, отделен от двигателя перегородкой 4 и закрыт металлическим колпаком 6, через который выведены провода 7 для подключения двигателя в сети постоянного тока. Подобная конструкция применена в БДПТ полезной мощностью от 1 до 120 Вт.
Таблица 30.1
Изменение направления вращения (реверс) двигателя осуществляется изменением полярности напряжения  в токовой цепи датчиков Холла. Изменение полярности напряжения U на входе двигателя недопустимо, так как при этом прекращается работа блока коммутатора.
в токовой цепи датчиков Холла. Изменение полярности напряжения U на входе двигателя недопустимо, так как при этом прекращается работа блока коммутатора.
Коэффициент полезного действия БДПТ по сравнению с коллекторными двигателями постоянного тока выше, что объясняется отсутствием щеточно-коллекторного узла, а значит, электрических потерь в щеточном контакте и механических потерь в коллекторе.
К достоинствам БДПТ относятся также высокая надежность и долговечность, что объясняется отсутствием у них щеточно-коллекторного узла, т. е. их бесконтактностью. Двигатели могут работать в условиях широкого диапазона температур окружающей среды, в вакууме, в средах с большой влажностью и т. п., где применение коллекторных двигателей недопустимо из-за неработоспособности щеточно-коллекторного узла.
Недостаток БДПТ — повышенная стоимость, обусловленная наличием полупроводникового блока коммутатора, чувствительных элементов (датчиков ЭДС Холла) и постоянного магнита.
§
Исполнительные двигатели постоянного тока, так же как исполнительные асинхронные двигатели (см. § 17.4), применяются в системах автоматики для преобразования электрического сигнала в механическое перемещение. Помимо обычных требований, предъявляемых к электродвигателям общего назначения, к исполнительным двигателям предъявляется ряд специфических требований, из которых основными являются отсутствие самохода и малоинерционность (см. § 17.4).
Почти все исполнительные двигатели (исключение составляют лишь двигатели с постоянными магнитами) имеют две обмотки. Одна из них постоянно подключена к сети и называется обмоткой возбуждения, на другую — обмотку управления электрический сигнал подается лишь тогда, когда необходимо вызвать вращение вала. От напряжения управления зависят частота вращения и вращающий момент исполнительного двигателя, а следовательно, и развиваемая им механическая мощность.
Исполнительные двигатели постоянного тока по конструкции отличаются от двигателей постоянного тока общего назначения только тем, что имеют шихтованные (набранные из листов электротехнической стали) якорь, станину и полюсы, что необходимо для работы исполнительных двигателей в переходных режимах. Магнитная цепь исполнительных двигателей не насыщена, поэтому реакция якоря (см. § 26.2) практически не влияет на их рабочие характеристики.
В качестве исполнительных двигателей постоянного тока в настоящее время используют чаще всего двигатели с независимым возбуждением, реже — двигатели с постоянными, магнитами. У двигателей с независимым возбуждением в качестве обмотки управления используют либо обмотку якоря — двигатели с якорным управлением, либо обмотку полюсов — двигатели с полюсным управлением.
У исполнительных двигателей с якорным управлением обмоткой возбуждения является обмотка полюсов, а обмоткой управления — обмотка якоря (рис. 30.10, а). Обмотку возбуждения подключают к сети с постоянным напряжением  на все время работы автоматического устройства. На обмотку управления подают сигнал (напряжение управления) лишь тогда, когда необходимо вызвать вращение якоря двигателя. От напряжения управления зависят вращающий момент и частота вращения двигателя. При изменении полярности напряжения управления меняется направление вращения якоря двигателя.
на все время работы автоматического устройства. На обмотку управления подают сигнал (напряжение управления) лишь тогда, когда необходимо вызвать вращение якоря двигателя. От напряжения управления зависят вращающий момент и частота вращения двигателя. При изменении полярности напряжения управления меняется направление вращения якоря двигателя.
У исполнительных двигателей с полюсным управлением обмоткой управления является обмотка полюсов, а обмоткой возбуждения — обмотка якоря (рис. 30.10, б). Якорь двигателя постоянно подключен к сети с напряжением  . Для ограничения тока иногда последовательно с якорем включают добавочное (балластное) сопротивление
. Для ограничения тока иногда последовательно с якорем включают добавочное (балластное) сопротивление  . На обмотку полюсов напряжение управления
. На обмотку полюсов напряжение управления  , (сигнал) подают лишь тогда, когда необходимо вызвать вращение якоря.
, (сигнал) подают лишь тогда, когда необходимо вызвать вращение якоря.

Рис. 30.10. Схема включения исполнительных двигателей постоянного тока
Исполнительные двигатели постоянного тока обычной конструкции имеют существенный недостаток — замедленность переходных процессов, т. е. отсутствие малоинерционности. Объясняется это в основном двумя причинами: наличием массивного якоря со стальным сердечником, обладающим значительным моментом инерции, и значительной индуктивностью  обмотки якоря, уложенной в пазы сердечника якоря. Последняя причина способствует увеличению электромагнитной постоянной времени
обмотки якоря, уложенной в пазы сердечника якоря. Последняя причина способствует увеличению электромагнитной постоянной времени  . Указанные недостатки отсутствуют в двигателях с гладким (полым) якорем (рис. 30.11). Станина 1 и полюсы 3 этого двигателя обычные. Возбуждение двигателя осуществляется либо с помощью обмотки возбуждения 2, либо постоянными магнитами.
. Указанные недостатки отсутствуют в двигателях с гладким (полым) якорем (рис. 30.11). Станина 1 и полюсы 3 этого двигателя обычные. Возбуждение двигателя осуществляется либо с помощью обмотки возбуждения 2, либо постоянными магнитами.

Рис. 30.11. Малоинерционный исполнительный двигатель постоянного тока с полым якорем
Для уменьшения момента инерции якоря его обмотка отделена от массивного ферромагнитного сердечника, последний выполнен неподвижным (внутренний статор 5) и расположен на цилиндрическом выступе подшипникового щита 6.
Обмотка якоря в процессе изготовления укладывается на цилиндрический каркас, а затем заливается пластмассой. Готовый якорь 4 представляет собой полый стакан, состоящий из проводников обмотки, связанных воедино пластмассой. Концы секций обмотки, как и в обычном двигателе, соединяются с пластинами коллектора, который является частью дна полого стакана якоря 4. Вращающийся узел двигателя с гладким якорем состоит из вала, коллектора и обмотки якоря, залитой пластмассой.
Момент инерции полого якоря значительно меньше момента инерции обычного якоря, что обеспечивает хорошее быстродействие двигателя. Кроме того, индуктивность обмотки якоря снижается, что также способствует повышению быстродействия двигателя. К тому же снижение индуктивности обмотки улучшает коммутацию двигателя за счет уменьшения реактивной ЭДС (см § 27.4).
Недостаток рассмотренного малоинерционного двигателя с полым якорем — наличие большого немагнитного промежутка между полюсами статора и неподвижным ферромагнитным сердечником — внутренним статором. Этот промежуток складывается из двух воздушных зазоров и толщины стакана якоря (толщины слоя обмотки якоря). Наличие большого немагнитного промежутка на пути магнитного потока требует значительного увеличения МДС возбуждения, что приводит, во-первых, к увеличению габаритов двигателя из-за увеличения объема обмотки возбуждения, а во-вторых, к росту потерь на нагрев обмотки возбуждения. Однако КПД двигателя с полым якорем вследствие отсутствия потерь в стали сердечника якоря практически находится на том же уровне, что и в обычных двигателях, а в случае применения для возбуждения постоянных моментов значительно превосходит КПД последних.
Контрольные вопросы
1. Каково назначение компенсационной обмотки в ЭМУ?
2. Почему выходная характеристика тахогенератора криволинейна?
3. Будет ли работать БДПТ, если изменить полярность напряжения на его входе (см. рис. 30.6)?
4. Объясните принцип якорного и полюсного способов управления исполнительными двигателями?
5. Каковы достоинства и недостатки малоинерционного двигателя постоянного тока?
Заключение
Достижения науки и техники, обусловленные ускорением научно-технического прогресса, способствуют совершенствованию всех отраслей промышленности и транспорта. В первую очередь, это относится к электрическим машинам, составляющим основу электроэнергетики, как в процессе производства электроэнергии, так и в процессе ее потребления.
Совершенствование электрических машин ведется по двум направлениям.
Во-первых, совершенствование технологии изготовления электрических машин, с целью увеличения их производства и снижения стоимости.
Во-вторых, применение в электрических машинах более качественных магнитных и электроизоляционных материалов, с целью повышения технико-экономических показателей электрических машин. И, наконец, в-третьих, создание новых видов электрических машин нетрадиционной конструкции, с использованием новейших достижений науки.
Работы последних лет показали, что резервы по усовершенствованию электрических машин традиционной конструкции во многом исчерпаны. Поэтому оказывается целесообразным переход к электрическим машинам нового принципа исполнения. В этом смысле особый интерес представляют криогенные и магнитогидродинамические электрические машины.
Криогенные электрические машины. В криогенных электрических машинах обмотки выполняют из сверхпроводников или химически чистых металлов (гиперпроводников). При снижении температуры удельное электрическое сопротивление сверхпроводников вначале плавно снижается, а затем при температуре критического перехода Θкр = 20 К (ниже -253 °С) резко падает до нуля: ρ* = 0 (ρ = 0), т. е. они переходят в состояние сверхпроводимости (рис. 3.1, кривая 1). У обычных металлов и сплавов нет состояния сверхпроводимости, и при снижении температуры их удельное электрическое сопротивление плавно уменьшается, достигая значения
ρ* = 10-1 при температуре абсолютного нуля (кривая 2).
У химически чистых металлов (гиперпроводников) также нет состояния сверхпроводимости, но при глубоком охлаждении их удельное электрическое сопротивление уменьшается до значения, в 5—7 тыс. раз меньшего, чем при комнатной температуре (кривая 3).

Рис.3.1. Зависимость электрического сопротивления проводников от температуры:
1 — сверхпроводники; 2 -обычные металлы; 3 — химически чистые металлы
Это свойство сверхпроводников и чистых металлов позволяет по проводам небольшого сечения пропускать значительные токи, доводя плотность тока до 100 А/мм2 и более. Электрические потери на нагрев обмоток при этом либо отсутствуют, либо незначительны. Все это дает возможность получать в криогенных машинах сильные магнитные поля с магнитной индукцией В = 5 ÷ 10 Тл (в машинах традиционного выполнения В = 0,8 ÷ 1,5 Тл).
Криогенная машина не содержит ферромагнитного сердечника, который, обладая свойством магнитного насыщения, не позволил бы получить столь высокие значения магнитной индукции, так как вызвал бы в машине значительные магнитные потери. Снижение потерь (электрических и магнитных) позволяет повысить КПД машин и более эффективно использовать их габариты, создавая машины весьма большой единичной мощности.
Необходимым элементом криогенной машины является криостат, представляющий собой теплоизолированную от внешней среды емкость, заполненную хладагентом (например, жидким гелием). Внутри криостата располагают охлаждаемую обмотку или же электрическую машину целиком.
Рассмотрим конструктивную схему криогенного турбогенератора со сверхпроводящими обмотками статора 4 и ротора 3 (рис. 3.2). Вся машина помещена в криостат, заполненный жидким гелием при температуре 10 К (-263 °С). На валу 2 расположено четыре металлических «полюса» 5, на каждом из которых укреплена говитковая полюсная катушка 3 из

Рис. 3.2. Конструктивная схема криогенного турбогенератоРа
со сверхпроводящими обмотками на статоре и роторе
сверхпроводника. Статор заключен в магнитный экран 7 из сверхпроводящего сплава. Поверхность экрана имеет множество отверстий, через которые внутрь машины проникает жидкий гелий. «Полюсы» ротора 5 и «сердечник» статора б, а также другие элементы конструкции машины не обладают ферромагнитными свойствами, а используются лишь для надежного закрепления обмоток.
Вся машина заключена в металлический кожух 8, образующий стенки криостата. Затем следует толстый слой теплоизоляции 9. Выделяющаяся за счет потерь теплота, а также теплота, проникающая в криостат из внешней среды, отбирается жидким гелием. Криогенная машина снабжена рефрижератором 10, подающим в криостат охлажденный гелий взамен испаряющегося. Контактные кольца 11 находятся в холодной зоне, а подшипники 1 и 12 вынесены за пределы криостата.
Рассмотренная конструкция криогенного генератора обладает существенным недостатком – значительные потери энергии в обмотке статора, вызванные переменным током в обмотке статора и переменным магнитным полем, наведанным этой обмоткой. Эти потери происходят главным образом из-за явления гистерезиса в сверхпроводящей обмотке. Пока еще не найдены эффективные способы ослабления этих потерь, вызывающих интенсивное испарение хладагента (жидкого гелия). Поэтому помимо электрических машин с криогированием обеих обмоток создаются и исследуются криогенные машины с криогированием только обмотки возбуждения. Эта обмотка питается постоянным током и защищена алюминиевым (демпфирующим) экраном от воздействия переменного магнитного поля обмотки статора, поэтому в ней не происходят явления, вызывающие магнитные потери. Обмотка статора в такой машине имеет обычную конструкцию, т. е. она вынесена за пределы криостата.
Исследования показали, что КПД криогенного синхронного турбогенератора с учетом всех дополнительных расходов энергии на собственные нужды (включая гелиевое охлаждение обмотки возбуждения) на 0,8% выше, чем у обычного синхронного генератора с водородным охлаждением мощностью 1200 тыс. кВт. При этом криогенный генератор имеет массу в четыре раза меньше.
В последнее время получены проводниковые материалы, обладающие сверхпроводимостью при температуре кипения жидкого азота (-196 °С) —хладагента более дешевого, чем жидкий гелий (температура кипения -268,9 °С). Ведутся работы по созданию проводниковых материалов с еще более высокой температурой сверхпроводимости. Применение этих материалов в криогенном электромашиностроении упростит конструкцию криостатов и снизит стоимость криогенных электрических машин.
Исследования показали, что в ближайшие 10—20 лет криогенное электромашиностроение станет одним из ведущих направлений при создании электрических машин особо большой мощности, выполнение которых по традиционным принципам технически невозможно.
*****многовитковая полюсная катушка 3 из сверхпроводника. Статор заключен в магнитный экран 7 из сверхпроводящего сплава. Поверхность экрана имеет множество отверстий, через которые внутрь машины проникает жидкий гелий. «Полюсы» ротора 5 и «сердечник» статора 6, а также другие элементы конструкции машины не обладают ферромагнитными свойствами, а используются лишь для надежного закрепления обмоток.
Вся машина заключена в металлический кожух 8, образующий стенки криостата. Затем следует толстый слой теплоизоляции 9. Выделяющаяся за счет потерь теплота, а также теплота, проникающая в криостат из внешней среды, отбирается жидким гелием. Криогенная машина снабжена рефрижератором 10, подающим в криостат охлажденный гелий взамен испаряющегося. Контактные кольца 11 находятся в холодной зоне, а подшипники 1 и 12 вынесены за пределы криостата.
Рассмотренная конструкция криогенного генератора обладает существенным недостатком – значительные потери энергии в обмотке статора, вызванные переменным током в обмотке статора и переменным магнитным полем, наведенным этой обмоткой. Эти потери происходят главным образом из-за явления гистерезиса в сверхпроводящей обмотке. Пока еще не найдены эффективные способы ослабления этих потерь, вызывающих интенсивное испарение хладагента (жидкого гелия). Поэтому помимо электрических машин с криогированием обеих обмоток создаются и исследуются криогенные машины с криогированием только обмотки возбуждения. Эта обмотка питается постоянным током и защищена алюминиевым (демпфирующим) экраном от воздействия переменного магнитного ноля обмотки статора, поэтому в ней не происходят явления, вызывающие магнитные потери. Обмотка статора в такой машине имеет обычную конструкцию, т. е. она вынесена за пределы криостата.
Исследования показали, что КПД криогенного синхронного турбогенератора с учетом всех дополнительных расходов энергии на собственные нужды (включая гелиевое охлаждение
обмотки возбуждения) на 0,8% выше, чем у обычного синхронного генератора с водородным охлаждением мощностью 1200 тыс. кВт. При этом криогенный генератор имеет массу в четыре раза меньше.
В последнее время получены проводниковые материалы, обладающие сверхпроводимостью при температуре кипения жидкого азота (-196°Г) —хладагента более дешевого, чем жидкий гелий (температура кипения -268,9 °С). Ведутся работы по созданию проводниковых материалов с еще более высокой температурой сверхпроводимости. Применение этих материалов в криогенном электромашиностроении упростит конструкцию криостатов и снизит стоимость криогенных электрических машин.
Исследования показали, что в ближайшие 10—20 лет криогенное электромашиностроение станет одним из ведущих направлений при создании электрических машин особо большой мощности, выполнение которых по традиционным принципам технически невозможно.
Магнитогидродинамические электрические машины. Рассмотрим принцип действия магнитогидродинамического (МГД) генератора, в котором тепловая энергия преобразуется непосредственно в электрическую. Принцип действия основан на том, что при движении рабочего тела, обладающего достаточной электропроводностью (электролита, жидкого металла, ионизированного газа), поперек силовых линий магнитного поля в этом рабочем теле индуцируется ЭДС и возникает ток, который через соответствующие электроды отводится во внешнюю электрическую цепь. Для пояснения воспользуемся упрощенной схемой МГД- генератора (рис. 3, а), в котором рабочим телом являются продукты сгорания топлива с присадкой, усиливающей их электропроводность. Топливо 1, воздух 2 и присадка 3 подаются н камеру сгорания 4. Образующийся при этом ионизированный газ выходит из сопла 5 и проходит через внутреннюю полость электромагнита 6 поперек магнитных силовых линий поля. В соответствии с явлением электромагнитной индукции в ионизированном газе наводится ЭДС, которая снимается двумя электродами 7 и подается во внешнюю цепь к потребителю rн. Ионизированный газ, пройдя через магнитное поле, выходит из генератора. Таким образом, в МГД-генераторе теплота, образуемая при сгорании топлива, непосредственно преобразуется в электрическую энергию, а поэтому необходимость в получении механической энергии отпадает (не нужны паровой котел и паровая турбина).
Исследования показали, что МГД-генераторы приобретают существенные преимущества перед тепловыми электростанциями традиционного действия лишь при условиях значительной единичной мощности (более 100 МВт) и изготовлении обмотки электромагнита из сверхпроводника, помещенного в криостат.
МГД-генераторы обратимы и могут работать в двигательном режиме. Обычно МГД-двигатели применяются для перемещения электропроводных жидкостей, их принято называть МГД- насосами. Для пояснения принципа работы МГД – насоса обратимся к рис. 3.3, б. Электропроводная жидкость, проходя через канал 1, попадает в пространство между полюсами N и S электромагнита. При этом через жидкость от электрода 2 к электроду 3 проходит электрический ток, который взаимодействует с магнитным полем и создает электромагнитные

Рис. 3.3. Принцип действия МГД-генератора (а) и МГД-двигателя (б)
силы, которые и «проталкивают» жидкость через межполюсное пространство электромагнита.
Подобные МГД-насосы могут применяться для транспортировки различных электропроводных жидкостей. Например, их можно использовать для перемещения расплавленного металла в литейном производстве.
Рассмотренные МГД-машины называют кондукционными, так как их конструкция предусматривает обязательное наличие электродов для съема или подачи электрического тока. Созданы также МГД-машины индукционные (асинхронные), в которых отсутствуют электроды, а ЭДС или электромагнитные силы возникают в результате взаимодействия перемещаемой электропроводной жидкости с бегущим магнитным полем [1].
Задачи для самостоятельного решения
1. ТРАНСФОРМАТОРЫ
Задача 1.1. Однофазный трансформатор включен в сеть с частотой тока 50 Гц. Номинальное вторичное напряжение U2ном, а коэффициент трансформации k. Определить число витков в обмотках w 1 и w2, если в стержне магнитопровода трансформатора сечением Qст максимальное значение магнитной индукции Вmах (табл. 1.1).
Таблица 1.1
Величины | Варианты | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| U2ном, В | 230 | 400 | 680 | 230 | 230 | 400 | 400 | 680 | 230 | 230 |
| k | 15 | 10 | 12 | 8 | 10 | 6 | 8 | 12 | 14 | 8 |
| Qст м2 * 10-1 | 0,49 | 0,80 | 1,2 | 1,8 | 0,65 | 0,80 | 1,2 | 0,76 | 0,60 | 085 |
| Вmax, Тл | 1,3 | 1,6 | 1,8 | 1,3 | 1,4 | 1,5 | 1,2 | 1,3 | 1,5 | и |
Задача 1.2. Для однофазного трансформатора номинальной мощностью Sном и первичным напряжением U1ном, мощностью короткого замыкания Рк.ном и напряжением к.з. uк рассчитать данные и построить график зависимости изменения вторичного напряжения ΔU от коэффициента нагрузки β, если коэффициент мощности нагрузки соs φ2 (табл. 1.2).
Таблица 1.2
Величины | Варианты | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| Sном, кВА | 600 | 250 | 800 | 100 | 180 | 560 | 320 | 50 | 120 | 80 |
| U1ном, кВ | 31,5 | 6,3 | 31,5 | 6,3 | 6,3 | 10 | 10 | 3,4 | 6,3 | 10 |
| Рк.ном, кВт | 20 | 12 | 22 | 7 | 10 | 25 | 13 | 3,5 | 8 | 5,4 |
| Uк, % | 8,5 | 6,5 | 8,5 | 5,5 | 6,5 | 7 | 6,5 | 5,5 | 5,5 | 6 |
| cos φ2 | 0,75 (емк.) | 0,85 (инд.) | 0,80 (емк.) | 0,70 (инд.) | 1,0 | 0,85 (инд.) | 0,9 (емк.) | 1,0 | 0,80 (инд.) | 0,70 (инд.) |
Задача 1.3. Для однофазного трансформатора, данные которого приведены в задаче 1.2, рассчитать и построить график зависимости КПД от нагрузки η = f (β), если максимальное значение КПД трансформатора соответствует коэффициенту нагрузки β/ = 0,7.
Задача 1.4. Трехфазный трансформатор номинальной мощностью Sном и номинальными напряжениями (линейными) U1ном и U2ном имеет напряжение короткого замыкания uк, ток холостого хода i0, потери холостого хода Р0ном и потери короткого замыкания Р к.ном. Обмотки трансформатора соединены по схеме «звезда— звезда». Требуется определить параметры Т-образной схемы замещения, считая ее симметричной: r1 = r2‘ и х1 = х2‘; определить КПД η и полезную мощность Р2, соответствующие значениям полной потребляемой мощности S1 = 0,25 Sном, S2 = 0,5 Sном, S3 = 0,75 Sном и S4 = Sном при коэффициентах мощности нагрузки соs φ2 = 0,8 и соs φ2 = 1, по полученным данным построить графики η = f(P2) в одних осях координат; определить номинальное изменение напряжения ΔUном (табл. 1.3).
Таблица 1.3
Величины | Варианты | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| Sном, кВА | 100 | 180 | 320 | 560 | 1000 | 800 | 600 | 700 | 400 | 200 |
| U1ном ,кВ | 0,5 | 3,0 | 6,0 | 10 | 35 | 10 | 10 | 6,0 | 3,0 | 3,0 |
| U2ном, кВ | 0,23 | 0,4 | 0,4 | 0,4 | 3,0 | 0,4 | 0,6 | 0,6 | 0,23 | 0,23 |
| Uк, % | 5,5 | 5,5 | 8,5 | 6,5 | 5,5 | 6,5 | 8,5 | 5,5 | 6,5 | 5,5 |
| Р0ном, кВт | 0,65 | 1,2 | 1,6 | 2,5 | 5,2 | 3,6 | 2,8 | 3,2 | 2,0 | 1,5 |
| Рк.ном, кВт | 2,0 | 3,6 | 5,8 | 9,0 | 13,5 | 10,0 | 9,0 | 8,2 | 6,0 | 4,0 |
| io. % | 6,5 | 5,5 | 5,5 | 5,5 | 5,0 | 5,0 | 5,5 | 5,5 | 5,5 | 6,5 |
Задача 1.5. Три трехфазных трансформатора номинальной мощностью SномI, SномII и SномIIIвключены на параллельную работу. Требуется определить: 1) нагрузку каждого трансформатора (SI, SII и SIII ) в кВ  А, если общая нагрузка равна сумме номинальных мощностей этих трансформаторов (Sобщ = SномI SномII SномIII );
А, если общая нагрузка равна сумме номинальных мощностей этих трансформаторов (Sобщ = SномI SномII SномIII );
2) степень использования каждого из трансформаторов по мощности (S/ Sном);
3) насколько следует уменьшить общую нагрузку трансформаторов Sобщ, чтобы устранить перегрузку трансформаторов; как при этом будут использованы трансформаторы по мощности в процентах (табл. 1.4).
Таблица 1.4
Величины | Варианты | ||||
| 1 | 2 | 3 | 4 | 5 | |
| Первый трансформатор | |||||
| Номинальная мощность Sном1 , кВА | 5000 | 5600 | 3200 | 1800 | 560 |
| Напряжение к.з. UкI, % | 5,3 | 5,3 | 4,3 | 4,4 | 4,0 |
| Второй трансформатор | |||||
| Номинальная мощность Sном1I, кВА | 3200 | 3200 | 4200 | 3200 | 420 |
| Напряжение к.з. UкII, % | 5,5 | 5,5 | 4,3 | 4,0 | 4,2 |
| Третий трансформатор | |||||
| Номинальная мощность Sном1II, кВА | 1800 | 3200 | 5600 | 4200 | 200 |
| Напряжение к.з. UкIII, % | 5,7 | 5,5 | 4,0 | 3,8 | 4,5 |
2. ОБЩИЕ ВОПРОСЫ ТЕОРИИ БЕСКОЛЛЕКТОРНЫХ МАШИН
Задача 2.1. Рассчитать параметры и начертить развернутую схему трехфазной двухслойной обмотки статора по данным, приведенным в табл. 2.1. Выбрать укорочение шага обмотки, чтобы уничтожалась v-я высшая гармоника в кривой индуцированной ЭДС обмотки. Соединение катушечных групп последовательное, фазы обмотки соединить звездой, катушки одновитковые.
Таблица 2.1
Величины | Варианты | |||||||||
| 1 | 1 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| Число пазов Z1, | 48 | 60 | 36 | 48 | 36 | 36 | 24 | 60 | 36 | 54 |
| Число полюсов 2р | 8 > | 4 | 4 | 4 | 2 | 6 | 2 | 10 | 6 | 6 |
| Гармоника v | 5 | 7 | 5 | 7 | 5 | 7 | 5 | 7 | 5 | 7 |
Задача 2.2. Используя данные и результаты расчета задачи 2.1, определить эффективные значения фазной и линейной ЭДС первой, третьей, пятой и седьмой гармоник, приняв величину основного магнитного потока Ф = 3/ Z1 Вб и частоту тока 50 Гц. Рассчитать значения этих ЭДС, если бы шаг обмотки был полным.
Задача 2.3. По данным задачи 2.1 рассчитать параметры и начертить развернутую схему трехфазной однослойной обмотки статора с лобовыми соединениями, расположенными в двух плоскостях. Катушечные группы соединить последовательно, фазные обмотки соединить звездой.
3. АСИНХРОННЫЕ МАШИНЫ
Задача 3.1. Определить значения ЭДС, индуцируемые вращающимся магнитным потоком Ф в обмотке статора Е1, в неподвижном и вращающемся роторах E2 и Е2s, частоту вращения ротора n2 и частоту тока в роторе f2, если известны число последовательно соединенных витков фазы обмотки статора w1, обмоточный коэффициент kоб1, число полюсов 2р, частота тока f1 = 50 Гц и номинальное скольжение sном (табл. 3.1).
Таблица 3.1
Величины | Варианты | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
Ф,Вб  10-3 10-3 | 45 | 34 | 28 | 82 | 55 | 45 | 58 | 48 | 40 | 75 |
| w1| | 96 | 100 | 128 | 48 | 66 | 46 | 60 | 80 | 84 | 40 |
| Kоб1 | 0,96 | 0,90 | 0,94 | 0,86 | 0,90 | 0,96 | 0,84 | 0,90 | 0,96 | 0,90 |
| Sном | 0,02 | 0,03 | 0,02 | 0,04 | 0,06 | 0,01 | 0,04 | 0,03 | 0,03 | 0,02 |
| 2р | 4 | 6 | 8 | 12 | 2 | 4 | 6 | 8 | 6 | 10 |
Задача 3.2. Трехфазный асинхронный двигатель с короткозамкнутым ротором серии 4А имеет технические данные, приведенные в табл. 3.2. Определить высоту оси вращения h, число полюсов 2р, скольжение при номинальной нагрузке sном, момент на валу Мном, начальный пусковой Мп и максимальный Мmах моменты, номинальный и пусковой токи I1ном и Iп в питающей сети при соединении обмоток статора звездой и треугольником.
Таблица 3.2
Тип двигателя | Варианты | |||||||
| Рном, кВт | n2нои, об/мин | ηном,% | соs φ1 |  |  |  | Uс, В | |
| 4А10082УЗ | 4,0 | 2880 | 86,5 | 0,89 | 7,5 | 2,0 | 2,5 | 220/380 |
| 4А16082УЗ | 15,0 | 2940 | 88,0 | 0,91 | 7,0 | 1,4 | 2,2 | 220/380 |
| 4А200М2УЗ | 37,0 | 2945 | 90,0 | 0,89 | 7,5 | 1,4 | 2,5 | 380/660 |
| 4А112М4УЗ | 5,5 | 1445 | 85,5 | 0,85 | 7,0 | 2,0 | 2,2 | 220/380 |
| 4А132М4УЗ | 11,0 | 1460 | 87,5 | 0,87 | 7,5 | 2,2 | 3,0 | 220/380 |
| 4А180М4УЗ | 30,0 | 1470 | 91,0 | 0,89 | 6,5 | 1,4 | 2,3 | 380/660 |
| 4А200М6УЗ | 22,0 | 975 | 90,0 | 0,90 | 6,5 | 1,3 | 2,4 | 220/380 |
| 4А280М6УЗ | 90,0 | 985 | 92,5 | 0,89 | 5,5 | 1,4 | 2,2 | 380/660 |
| 4А315М8УЗ | 110 | 740 | 93,0 | 0,85 | 6,5 | 1,2 | 2,3 | 380/660 |
| 4А355М10УЗ | 110 | 590 | 93,0 | 0,83 | 6,0 | 1,0 | 1,8 | 380/660 |
Задача 3.3. Трехфазный асинхронный двигатель с короткозамкнутым ротором, работающий от сети частотой 50 Гц и напряжением U1 (фазное), имеет параметры, приведенные в табл. 3.3: номинальная мощность Рном, коэффициент мощности соs φ1ном, магнитные потери Рм механические потери Рмх, активное сопротивление фазы обмотки статора r1 при рабочей температуре, активное приведенное сопротивление обмотки ротора r/2 . Рассчитать данные и построить график зависимости КПД от относительного значения полезной мощности η = f (Р2/ Рном). При этом принять добавочные потери равными Рдоб = 0,005 Р2, а коэффициент мощности считать изменяющимся в функции Р2/ Рном в соответствии с графиком 2 на рис. 13.9.
Таблица 3.3
Величины | Варианты | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| Рном, кВт | 4,0 | 15 | 45 | 5,5 | 11 | 30 | 4,0 | 15 | 110 | 250 |
| cos φ 1ном | 0,89 | 0,91 | 0,90 | 0,86 | 0,87 | 0,89 | 0,84 | 0,88 | 0,9 | 0,92 |
| U1,В | 220 | 220 | 220 | 220 | 220 | 380 | 220 | 380 | 380 | 380 |
| r1, 0м | 1,62 | 0,40 | 0,083 | 1,5 | 0,53 | 0,16 | 1,62 | 1,1 | 0,11 | 0,03 |
| r2‘ , Ом | 1,4 | 0,2 | 0,043 | 1,2 | 0,28 | 0,06 | 1,40 | 0,4 | 0,02 | 0,01 |
| Pм, Вт | 129 | 270 | 730 | 145 | 230 | 680 | 129 | 264 | 1230 | 1670 |
| Рмех, Вт | 80 | 250 | 370 | 40 | 100 | 320 | 30 | 125 | 550 | 900 |
Задача 3.4. Трехфазный асинхронный двигатель с короткозамкнутым ротором работает от сети переменного тока частотой 50 Гц. При номинальной нагрузке ротор двигателя вращается с частотой n2ном; перегрузочная способность двигателя λ, а кратность пускового момента Мп/ Мном. Рассчитать данные и построить механическую характеристику двигателя в относительных единицах М* = f (s) (табл. 3.4).
Таблица 3.4
Величины | Варианты | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| n2ном об/мин | 1450 | 2940 | 960 | 1420 | 720 | 2920 | 580 | 1430 | 730 | 575 |
| λ | 2,2 | 1,9 | 2,0 | 2,2 | 2,0 | 1,9 | 1,8 | 2,2 | 1,7 | 1,8 |
| Мп /Мном | 1,4 | 1,4 | 1,2 | 1,0 | 1,0 | 1,2 | 1,4 | 1,0 | 0,9 | 1,0 |
4. СИНХРОННЫЕ МАШИНЫ
Задача 4.1. Имеется трехфазный синхронный генератор мощностью Sном с напряжением на выходе U1ном (обмотка статора соединена звездой) при частоте тока 50 Гц и частоте вращения n1. КПД генератора при номинальной нагрузке ηном (табл. 4.1). Генератор работает на нагрузку с соs φном = 0,9. Требуется определить активную мощность генератора при номинальной нагрузке Рном, ток в обмотке статора I1ном, требуемую первичному двигателю мощность Р1 и вращающий момент М1 при непосредственном механическом соединении валов генератора и первичного двигателя.
Таблица 4.1
Величины | Варианты | |||||||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | |
| Sном, кВА | 330 | 400 | 270 | 470 | 230 | 600 | 780 | 450 | 700 | 500 |
| U1ном, кВ | 6,3 | 3,2 | 0,4 | 6,3 | 0,7 | 3,2 | 6,3 | 0,4 | ||





