Приведение сил инерции твердого тела
1.Поступательное движение.Все точки тела движутся с одинаковыми траекториями и ускорениями, равными ускорению центра масс  (по определению поступательного движения). Тогда имеем равнодействующую сил инерции, проходящую через центр масс:
(по определению поступательного движения). Тогда имеем равнодействующую сил инерции, проходящую через центр масс:
 .
.
2. Вращательное движение.Пусть твердое тело вращается вокруг оси Оz, перпендикулярной плоскости хОу (плоскости материальной симметрии). Если привести силы инерции к центру О, то образуется равнодействующая сил инерции  , приложенная в точке О, и главный момент сил инерции
, приложенная в точке О, и главный момент сил инерции  , лежащий в плоскости хОу.
, лежащий в плоскости хОу.
3. Вращение вокруг оси, проходящей через центр масс тела.В этом случае  , т.к. аС = 0. Таким образом, система сил инерции тела приводится только к паре с моментом:
, т.к. аС = 0. Таким образом, система сил инерции тела приводится только к паре с моментом:
 .
.
4. Плоскопараллельное движение.Если тело движется параллельно плоскости симметрии, то система сил инерции приводится к  , приложенной в центре масс и паре с моментом
, приложенной в центре масс и паре с моментом
 .
.
Пример.Два груза весом  и
и  , связанные нитью, движутся по горизонтальной плоскости под действием силы
, связанные нитью, движутся по горизонтальной плоскости под действием силы  , приложенной к первому грузу. Коэффициент трения скольжения грузов о плоскость равен f. Определить ускорение грузов и натяжение нитей.
, приложенной к первому грузу. Коэффициент трения скольжения грузов о плоскость равен f. Определить ускорение грузов и натяжение нитей.
Решение.
Обозначим все действующие внешние силы и приложим в центре масс каждого из грузов силы инерции, численно равные:
Запишем уравнение равновесия в проекции на горизонтальную ось:
откуда


Для определения натяжения нити рассмотрим сумму проекций на горизонтальную ось всех внешних сил, действующих, например, на второй груз:
oткуда  .
.
Интересно, что сила натяжения не зависит от коэффициента трения (от силы трения) и тем меньше, чем меньше вес второго груза.
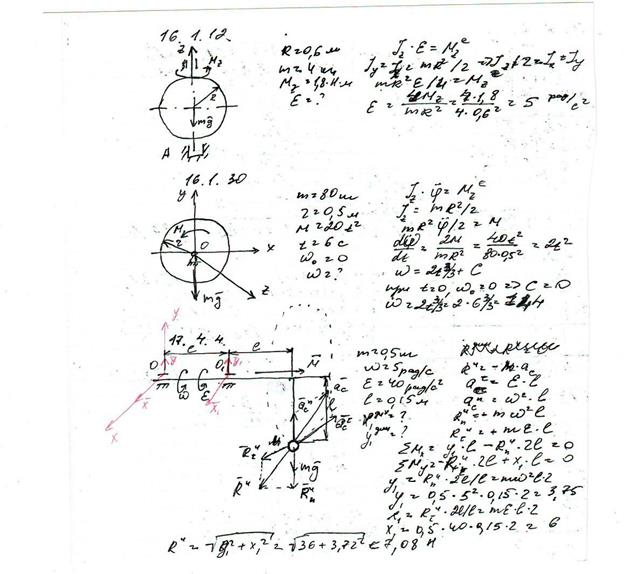
Пример. На барабан весом Р и радиусом r намотана нить с грузом на конце весом  . Пренебрегая весом нити, определить угловое ускорение барабана и натяжение нити, если радиус инерции относительно оси О равен r и на барабан действует постоянный момент сил трения Мтр.
. Пренебрегая весом нити, определить угловое ускорение барабана и натяжение нити, если радиус инерции относительно оси О равен r и на барабан действует постоянный момент сил трения Мтр.
Решение.
«Остановим» груз силой инерции (т.к. он движется поступательно), а барабан – моментом сил инерции:
Теперь система находится в равновесии. Применим к ней уравнения статики (на рисунке не показаны вес барабана и реакция шарнира, т.к. они не дают момент относительно центра О):

или
 ,
,
откуда
 .
.
Натяжение нити определяется аналогично предыдущей задаче.
§
Пусть твердое тело вращается равномерно вокруг оси Оz в подшипниках А и В. Пусть координатные оси Аxyz вращаются вместе с телом. На тело действуют силы  . Их равнодействующая
. Их равнодействующая  имеет проекции
имеет проекции  , а их главные моменты –
, а их главные моменты –  .
.
При этом  , т.к. w = const.
, т.к. w = const.
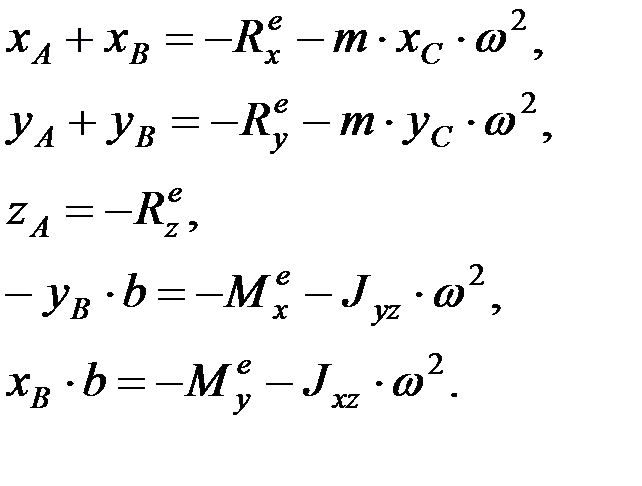
Для определения динамических реакций подшипников xA, yA, zA, xB, yB, zВ присоединим к заданным силам и реакциям силы инерции  всех частиц тела и приведем их к точке А. Таким образом, получим:
всех частиц тела и приведем их к точке А. Таким образом, получим:

Согласно принципу Даламбера, составим уравнения равновесия, полагая, что АВ = b:
 , т.к.
, т.к.  и
и  .
.
Главный вектор сил инерции  . При равномерном вращении возникает лишь нормальное ускорение
. При равномерном вращении возникает лишь нормальное ускорение  , где hС – расстояние от точки С до оси вращения. Проецируем
, где hС – расстояние от точки С до оси вращения. Проецируем  на оси координат, учитывая что hС cosa = xС, получим:
на оси координат, учитывая что hС cosa = xС, получим:
hС sina = yС,
где xС и yС – координаты центра тяжести.
Тогда  .
.
Чтобы определить  и
и  , рассмотрим частицу тела, удаленную от оси на расстояние hС, тогда
, рассмотрим частицу тела, удаленную от оси на расстояние hС, тогда
 .
.
Для всех точек тела
 ,
,
где  и
и  – центробежные моменты инерции.
– центробежные моменты инерции.
Подставим найденные значения в написанную систему уравнений:
Эти уравнения определяют динамические реакции, действующие на ось, равномерно вращающуюся вокруг оси Оz твердого тела. Если w = 0, то получим статические реакции. Очевидно, что динамические реакции могут быть значительно больше статических. Причем они зависят от w, xС, yС, Jxy, Jyz. Однако, если центр тела будет лежать на оси вращения, то xС = 0, yС = 0, Jxz = 0, Jyz = 0, тогда, если ось вращения будет главной центральной осью инерции тела, динамические реакции будут равны статическим.
Итак, если тело вращается вокруг одной из главных центральных осей тела, то динамические реакции равны статическим.
Центробежные моменты характеризуют степень динамической неуравновешенности тела. Динамическое уравновешивание является важной технической задачей.
Известно, что любое тело имеет по крайней мере три взаимно перпендикулярные главные центральные оси инерции. Любую ось, проведенную в теле, можно сделать главной центральной осью инерции прибавлением к телу двух точечных масс. Такой метод уравновешивания широко используется в технике. При этом окончательная балансировка проводится на специальных стендах.
Лекция 14
ПРИНЦИП ВОЗМОЖНЫХ ПЕРЕМЕЩЕНИЙ. ПРИНЦИП ДАЛАМБЕРА – ЛАГРАНЖА
(общее уравнение динамики)
Классификация связей. Принцип возможных перемещений.
Число степеней свободы. Идеальные связи. Общее уравнение динамики
Связями называются ограничения, которые налагаются на положения и скорости точек механической системы и которые выполняются независимо от того, какие на систему действуют силы.
§
 Стационарные связи не изменяются со временем. Нестационарные связи изменяются со временем (пример нестационарной связи показан на рисунке). Геометрические связи накладывают ограничения на положение (координаты).
Стационарные связи не изменяются со временем. Нестационарные связи изменяются со временем (пример нестационарной связи показан на рисунке). Геометрические связи накладывают ограничения на положение (координаты).
Кинематические (дифференциальные) связи ограничивают скорость. Обычно кинематическая связь является одновременно и геометрической, т.к. скорость является первой производной от координаты по времени. Если дифференциальную связь можно представить как геометрическую, т.е. зависимость между скоростями можно свести к зависимости между координатами, то такая связь называется интегрируемой, в противном случае – неинтегрируемой.
Геометрические и интегрируемые дифференциальные связи называются голономными, а неинтегрируемые – неголономными. Механические системы также делятся по виду связей на голономные и неголономные.
Пример. Колесо катится по рельсу, при этом VC = wR, . Проинтегрировав, получим xС = jR , следовательно, связь является голономной. Она также является геометрической, кинематической, дифференциальной и интегрируемой.
. Проинтегрировав, получим xС = jR , следовательно, связь является голономной. Она также является геометрической, кинематической, дифференциальной и интегрируемой.
Удерживающие (двусторонние) связи препятствуют перемещению точек в противоположных направлениях. Неудерживающие (односторонние) связи препятствуют перемещению точек в одном направлении.
Пример.
§
Представим себе стержень АВ на неподвижной оси вращения О. Чтобы однозначно определить положение всех точек, очевидно, достаточно задать закон изменения угла поворота стержня.
 Возьмем кривошипный механизм. Здесь тоже положение всех точек определяется заданием одного угла поворота кривошипа. Теперь представим центробежный регулятор, вращающийся вокруг вертикальной оси. Для того чтобы вполне определить положение любой точки, необходимо задать две величины – угол j и угол a. Или, например, рассмотрим материальную точку, находящуюся на плоскости. Для задания ее положения в двух взаимно перпендикулярных направлениях необходимо задать координаты x и y. Эти системы обладают двумя степенями свободы.
Возьмем кривошипный механизм. Здесь тоже положение всех точек определяется заданием одного угла поворота кривошипа. Теперь представим центробежный регулятор, вращающийся вокруг вертикальной оси. Для того чтобы вполне определить положение любой точки, необходимо задать две величины – угол j и угол a. Или, например, рассмотрим материальную точку, находящуюся на плоскости. Для задания ее положения в двух взаимно перпендикулярных направлениях необходимо задать координаты x и y. Эти системы обладают двумя степенями свободы.
Вообще, если положение всех точек системы вполне определяется заданием К независимых величин, то говорят, что система имеет К степеней свободы.
Число независимых между собой возможных перемещений механической системы называется числом степеней свободы этой системы.
У свободной точки три степени свободы – вдоль координат х, у, z. У свободного твердого тела – 6 степеней свободы: три линейных перемещения вдоль осей х, у, z и три поворота относительно этих трех осей.
Идеальные связи
Представим механическую систему, состоящую из материальных точек  . Пусть каждая точка этой системы подчинена двусторонней связи. Реакции связей обозначим через R1, R2, … Rn . Сообщим системе какое-либо возможное перемещение. Перемещения точек системы обозначим через
. Пусть каждая точка этой системы подчинена двусторонней связи. Реакции связей обозначим через R1, R2, … Rn . Сообщим системе какое-либо возможное перемещение. Перемещения точек системы обозначим через  .
.
Вычислим сумму работ реакций связей на этих перемещениях. Если сумма работ равна нулю для всех возможных перемещений системы, то данная связь называется идеальной.
Идеальными называются связи, для которых сумма элементарных работ их реакций на любом возможном перемещении системы равна нулю:
 .
.
Докажем, что если механическая система с идеальными связями находится в равновесии под действием приложенных сил, то при любом возможном перемещении системы должно выполняться равенство:
или
 ,
,
где a – угол между силой и возможным перемещением.
Обозначим силы, действующие на точку через  и
и  , тогда для каждой точки системы
, тогда для каждой точки системы  , т.к. система находится в равновесии, а следовательно, и сумма работ этих сил при любом перемещении точки равна нулю:
, т.к. система находится в равновесии, а следовательно, и сумма работ этих сил при любом перемещении точки равна нулю:
 .
.
Составив такие равенства для всех точек системы и сложив их почленно, получим
 .
.
Так как связи идеальные, второе слагаемое равно нулю, тогда равна нулю и первая сумма.
§
Для равновесия механической системы с идеальными связями необходимо и достаточно, чтобы сумма элементарных работ всех действующих на нее активных сил при любом возможном перемещении системы была равна нулю:
 .
.
Этот принцип позволяет исключить из рассмотрения все заранее неизвестные реакции связей.
Равновесие рычага (золотое правило механики)
Представим рычаг, вращающийся на шарнире О, на концах которого действуют силы  и
и  . Обозначим АО = а, ВО = в. Дадим системе возможное перемещение, тогда точки А и В сместятся соответственно на dQ и dP. Получим
. Обозначим АО = а, ВО = в. Дадим системе возможное перемещение, тогда точки А и В сместятся соответственно на dQ и dP. Получим  , а так как dQ = а·djи dР= в·dj , то Ра·dj– Qв·dj = 0.
, а так как dQ = а·djи dР= в·dj , то Ра·dj– Qв·dj = 0.
Сократив на dj,получим  .
.
Это и есть условие равновесия рычага. Очевидно, что это уравнение моментов относительно точки О.
 .
.
Если рычаг находится в равновесии под действием двух сил, то возможные перемещения точек приложения сил обратно пропорциональны этим силам. Это можно сформулировать так: то, что выигрывается в силе, теряется в скорости (золотое правило механики).
Принцип Даламбера–Лагранжа (общее уравнение динамики)
Принцип возможных перемещений дает общий метод решения задач статики. С другой стороны, принцип Даламбера позволяет использовать методы статики при решении задач динамики. Следовательно, применение этих принципов одновременно позволит получить общий метод решения задач динамики.
Пусть дана система материальных точек А1, А2, … Аn.
Если ко всем точкам системы, кроме действующих на них активных сил и реакций связей, приложить еще и силы инерции  , то, согласно принципу Даламбера, система будет находится в равновесии. В соответствии с принципом возможных перемещений:
, то, согласно принципу Даламбера, система будет находится в равновесии. В соответствии с принципом возможных перемещений:
 .
.
Если связи идеальные, то последняя сумма равна нулю, тогда:
 .
.
Это и есть принцип Даламбера–Лагранжа: при движении механической системы с идеальными связями в каждый момент времени сумма элементарных работ всех приложенных активных сил и всех сил инерции на любом возможном перемещении системы будет равна нулю.
Уравнение, выражающее этот принцип, называют общим уравнением динамики. В аналитической форме оно имеет вид:
 .
.
Если система представляет собой совокупность каких-нибудь твердых тел, то для составления уравнения нужно к действующим на каждое тело активным силам прибавить в любом центре силу, равную главному вектору сил инерции, и пару с моментом, равным главному моменту сил инерции относительно этого центра, а затем применить принцип возможных перемещений.
Пример.В подъемнике, изображенном на рисунке, к шестерне 1, имеющей массу m1 и радиус R1 , приложен вращающий момент М.  Определить ускорение поднимаемого груза 3 весом Q , пренебрегая весом веревки и трением в осях. Барабан, на который наматывается веревка, жестко скреплен с другой шестерней; их общая масса равна m2, радиус инерции равен i2, радиусы шестерен равны соответственно R1 и R2.
Определить ускорение поднимаемого груза 3 весом Q , пренебрегая весом веревки и трением в осях. Барабан, на который наматывается веревка, жестко скреплен с другой шестерней; их общая масса равна m2, радиус инерции равен i2, радиусы шестерен равны соответственно R1 и R2.
Решение.
Обозначим на рисунке все активные силы (в данном случае это силы тяжести тел) и применим к системе принцип Даламбера. Для этого приложим к грузу 3 силу инерции  и к дискам 1 и 2 – моменты сил инерции
и к дискам 1 и 2 – моменты сил инерции  .
.
Теперь система находится в равновесии, и к ней можно применить принцип возможных перемещений (принцип Лагранжа). Для этого сообщим, например, грузу 3 возможное перемещение d3. Диски при этом получат перемещение dj1 и dj2 . Согласно принципу Даламбера–Лагранжа, сумма работ всех активных сил и всех сил инерции на возможном перемещении системы должна быть равна нулю. Следовательно,
 .
.
Выразим все перемещения через d3 . Для простоты решения задачи сначала выразим скорости всех тел через скорость груза 3. Т.к. связи дифференциальные и интегрируемые, перемещения и ускорения тел будут подвержены тем же зависимостям:
 .
.
Далее выразим моменты и силы инерции с учетом уже полученных зависимостей:
 ;
;
 ;
;
 .
.
Подставим полученные значения в уравнение возможных работ. Далее, сократив левую и правую части уравнения на d3 , выразим a3.


откуда  .
.
§
Обобщенные координаты системы. Обобщенные силы
и способ их вычисления. Уравнения Лагранжа II-го рода
Обобщенными координатами механической системы называются величины, заданием которых вполне определяется положение всех точек системы.
Числом степеней свободы системы называется число независимых обобщенных координат, определяющих положение точек системы.
Рассмотрим механическую систему, состоящую из п материальных точек М1, М2, … Мп, имеющую К степеней свободы. Обозначим ее независимые обобщенные координаты q1, q2, … qk. Они вполне определяют положение всех точек системы. Тогда декартовы координаты системы будут функциями обобщенных координат:
Эти соотношения имеют место только в том случае, когда связи не зависят от времени. Возможно существование связей, изменяющихся с течением времени.
Пример: нить маятника тянут за конец А с постоянной скоростью V.
Пусть ОМ = l , тогда  ,
,
Очевидно, что в данной задаче декартовы координаты – не только функции обобщенной координаты j, но и времени t.
В этом случае имеем:

Связи, не зависящие от времени, называются склерономными (или стационарными), а изменяемые с течением времени – реономными (или нестационарными).
Обобщенные силы
Рассмотрим механическую систему, состоящую из п материальных точек: М1, М2, … Мп, имеющую К степеней свободы. Обозначим ее независимые обобщенные координаты q1, q2, … qk. Предположим, что к точкам системы приложены силы  . Чтобы вычислить обобщенную силу, дадим координате q1 ничтожно малое приращение dq1 , оставляя прочие координаты без изменения. Это изменение координаты q1 вызовет ничтожно малые перемещения e1, e2, eпвсех точек системы. Вычислим сумму работ сил
. Чтобы вычислить обобщенную силу, дадим координате q1 ничтожно малое приращение dq1 , оставляя прочие координаты без изменения. Это изменение координаты q1 вызовет ничтожно малые перемещения e1, e2, eпвсех точек системы. Вычислим сумму работ сил  на перемещениях e1, e2, eп:
на перемещениях e1, e2, eп:
 .
.
Пусть эта работа равна произведению некоторого множителя Q1на приращение координаты dq1. Поступая аналогично, найдем Q2, … Qk, соответствующие координатам q2, … qk:
 .
.
Обобщенная сила – это величина, равная коэффициенту при приращении обобщенной координаты в выражении полной элементарной работы действующих на систему сил.
Не следует считать, что обобщенная сила всегда имеет размерность [Ньютон]. Работа всегда вычисляется в джоулях (1 Дж =1 Н×м).
| Размерность обобщенной координаты | Размерность обобщенной силы |
| м | Н |
| рад | Н×м |
| м3 | Па |
В механической системе с идеальными связями обобщенные реакции связей всегда равны нулю, поэтому при переходе к обобщенным силам реакции связей автоматически выпадают из расчетов. В этом большое преимущество методов Лагранжа.
§
К барабану 1 радиуса R приложен момент М, под действием которого осуществляется подъем груза 2. Массы барабана и груза соответственно равны т1 и т2.
Представленная на рисунке механическая система имеет одну степень свободы. Для определения обобщенной силы выберем в качестве обобщенной координаты угол поворота барабана – j (направим его против часовой стрелки). Дадим обобщенной координате приращение dj и вычислим полную элементарную работу всех активных сил на этом перемещении:
 .
.
Работа от веса барабана равна нулю, т.к. ось его вращения не перемещается. Тогда обобщенная сила равна  .
.
Другой пример. Пусть система материальных точек М1, М2, М3, … Мп имеет k степеней свободы. Обозначим ее обобщенные координаты q1, q2, … qk. Возьмем декартовы оси x, y, z и обозначим координаты точки Мi через  . Координаты являются функциями обобщенных координат и времени:
. Координаты являются функциями обобщенных координат и времени:
К системе приложены силы  . Вычислим обобщенные силы
. Вычислим обобщенные силы  . Например,
. Например,  .
.
Элементарную работу силы Fiмы можем вычислить как
 .
.
Т.к.  ,
,  ,
,  , то
, то
 .
.
Рассуждая аналогично и поделив обе части равенства на dq, получим:
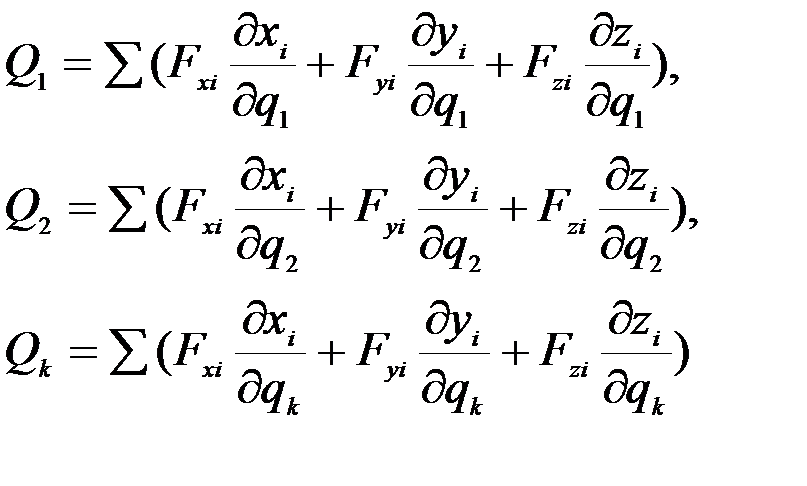
или
 .
.
§
Согласно принципу возможных перемещений, необходимым и достаточным условием является равенство нулю суммы элементарных работ всех активных сил на любом возможном перемещении системы  , тогда
, тогда
 .
.
Так как обобщенные координаты  не зависят друг от друга, то равенство выполнимо только в том случае, если каждое слагаемое равно нулю, т.е.
не зависят друг от друга, то равенство выполнимо только в том случае, если каждое слагаемое равно нулю, т.е.  .
.
Для равновесия механической системы необходимо и достаточно, чтобы все обобщенные силы, соответствующие выбранным для системы обобщенным координатам, были равны нулю.
Уравнения Лагранжа
Для определения уравнений движения в обобщенных координатах обратимся к общему уравнению динамики:
 .
.
Пусть система имеет k степеней свободы. Тогда
 ,
,
 .
.
Подставляя в общее уравнение динамики, получим:

или
 ,
,
где  – обобщенные силы инерции, которые равны
– обобщенные силы инерции, которые равны
 .
.
Так как  , то
, то
 (1)
(1)
Выразим обобщенную силу через кинетическую энергию. Имеем
 , (2)
, (2)
так как 
Заметим, что
 ,
,
 .
.
Подставим полученные выражения в уравнение (2):
 .
.
Тогда уравнение (1) примет вид:
 ,
,
где Т – кинетическая энергия.
Аналогичные выражения получаем для всех остальных обобщенных координат. Поскольку  , то
, то
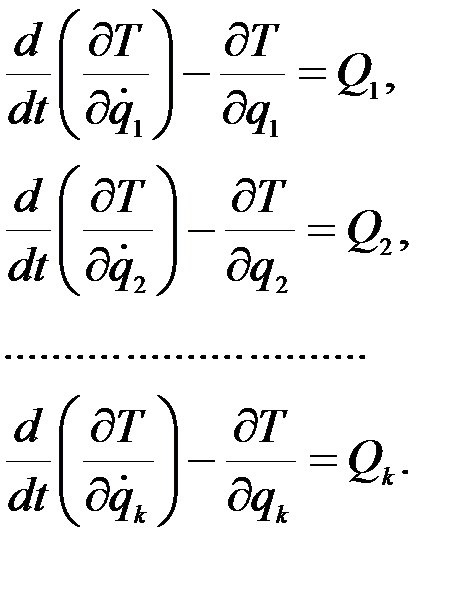
Это дифференциальные уравнения движения системы в обобщенных координатах или уравнения Лагранжа II-го рода (уравнения в частных производных). Число этих уравнений равно числу степеней свободы системы.
Основные преимущества использования уравнений Лагранжа при решении задач:
1) количество уравнений не зависит от количества тел, входящих в систему;
2) данный способ позволяет исключить из рассмотрения все неизвестные реакции связей.
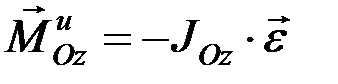
Пример.Механизм робота-манипулятора состоит из колонны для вертикального перемещения, устройства для горизонтального перемещения, состоящего из звеньев 1 и 2, и выдвигающейся горизонтальной руки со схватом 3. Массы звеньев механизма т1, т2и т3. Движущие силы, создаваемые приводами в поступательных парах, равны соответственно F01, F12 и F23. Составить дифференциальные уравнения движения механизма. Трением пренебречь.
Решение.
Рассматриваемая механическая система имеет три степени свободы. Выберем обобщенные координаты:  , тогда обобщенные скорости выразятся как
, тогда обобщенные скорости выразятся как 
Вычислим кинетическую энергию системы. Т.к. звенья 1, 2 и 3 двигаются поступательно, то
 Вычислим частные производные от кинетической энергии:
Вычислим частные производные от кинетической энергии:
 ;
;
 ;
;
 ,
,
 ;
;  ;
;  .
.
Далее, дифференцируя по времени, получим:
Для определения обобщенной силы  сообщим системе перемещение
сообщим системе перемещение  . При этом работу совершит движущая сила
. При этом работу совершит движущая сила  , направленная вверх, и силы тяжести всех 3-х звеньев:
, направленная вверх, и силы тяжести всех 3-х звеньев:
 .
.
Многочлен, стоящий в квадратных скобках, является обобщенной силой:  .
.
Аналогично вычислим обобщенные силы  и
и  :
:
 , тогда
, тогда  .
.
Силы тяжести не совершают работу, т.к. движение вдоль оси y происходит по горизонтали, поэтому
 ,
,
откуда  .
.
Запишем полученные дифференциальные уравнения движения:
§
При движении тела под действием сил, которые до сих пор рассматривались, скорости точек тела изменяются непрерывно, т. е. за любой бесконечно малый промежуток времени скорость получает бесконечно малое приращение. Этот результат непосредственно следует из теоремы об изменении количества движения.
Действительно, допустим, имеется точка с массой т, на которую действуют силы  (К = l, 2, … , п). Представим импульс любой из этих сил за промежуток времени t в виде
(К = l, 2, … , п). Представим импульс любой из этих сил за промежуток времени t в виде  , где
, где  есть среднее значение силы за время t. Тогда теорема об изменении количества движения этой точки дает:
есть среднее значение силы за время t. Тогда теорема об изменении количества движения этой точки дает:
 .
.
Отсюда видно, что, если время t бесконечно мало (стремится к нулю), то при обычных силах и приращение скорости  будет тоже величиной бесконечно малой (стремящейся к нулю).
будет тоже величиной бесконечно малой (стремящейся к нулю).
Однако, если в числе действующих сил будут очень большие силы (порядка 1/τ), то приращение скорости за малый промежуток времени окажется величиной конечной.
Явление, при котором скорости точек тела за очень малый промежуток времени t изменяются на конечную величину, называется ударом.
Силы, при действии которых происходит удар, будем называтьударными силами  . Очень малый промежуток времени t, в течение которого происходит удар, назовем временем удара.
. Очень малый промежуток времени t, в течение которого происходит удар, назовем временем удара.
Так как ударные силы очень велики и за время удара изменяются в значительных пределах, то в теории удара в качестве меры взаимодействия тел рассматривают не сами ударные силы, а их импульсы, которые называют ударными импульсами. Величина ударного импульса определяется равенством:
 (1)
(1)
Из определения следует, что ударный импульс  будет величиной конечной. Импульсы неударных сил за время t будут величинами очень малыми и ими можно пренебречь. Будем в дальнейшем обозначать скорость точки в начале удара
будет величиной конечной. Импульсы неударных сил за время t будут величинами очень малыми и ими можно пренебречь. Будем в дальнейшем обозначать скорость точки в начале удара  , а скорость в конце удара
, а скорость в конце удара  . Тогда равенство (1) примет вид:
. Тогда равенство (1) примет вид:
 . (2)
. (2)
Этот результат выражает теорему об изменении количества движения точки при ударе:изменение количества движения материальной точки за время удара равно сумме действующих на точку ударных импульсов.
Уравнение (2) являетсяосновным уравнением теории удара.
Отметим, что перемещение точки за время удара будет равно  , где
, где  – среднее значение скорости за время t. Так как t очень мало, то это перемещение будет также величиной очень малой, которой практически можно пренебречь. Итак, из всех полученных результатов вытекает:
– среднее значение скорости за время t. Так как t очень мало, то это перемещение будет также величиной очень малой, которой практически можно пренебречь. Итак, из всех полученных результатов вытекает:
1) действием неударных сил (таких, например, как сила тяжести) за время удара можно пренебречь;
2) перемещениями точек тела за время удара можно пренебречь и считать тело во время удара неподвижным;
3) изменение скоростей точек тела за время удара определяется основным уравнением теории удара (2).
§
Теорема об изменении количества движения системы при ударе.Рассмотрим систему, состоящую из материальных точек. Обозначим равнодействующую внешних ударных импульсов, приложенных в точке с массой тК, через  , а равнодействующую внутренних ударных импульсов – через
, а равнодействующую внутренних ударных импульсов – через  . Тогда, используя уравнение (2), получим:
. Тогда, используя уравнение (2), получим:
 .
.
Составляя подобные уравнения для всех точек системы и складывая их почленно, получим:
 .
.
Суммы, стоящие слева, представляют собой количества движения системы в конце и начале удара, которые обозначим  и
и  . Стоящая справа сумма внутренних ударных импульсов по свойству внутренних сил равна нулю. Окончательно находим
. Стоящая справа сумма внутренних ударных импульсов по свойству внутренних сил равна нулю. Окончательно находим
 , (3)
, (3)
т.е. изменение количества движения системы за время удара равно сумме всех внешних ударных импульсов, действующих на систему.
В проекциях на оси координат уравнение (3) дает:
 (4)
(4)
Если геометрическая сумма всех внешних ударных импульсов равна нулю, то, как видно из уравнения (3), количество движения системы за время удара не изменяется. Следовательно, внутренние ударные импульсы не могут изменить количества движения всей системы.
§
Для решения задач по теории удара основного уравнения (2) или вытекающих из него уравнений (3) и (4) оказывается недостаточным. Объясняется это тем, что величина ударного импульса, возникающего при соударении двух тел, зависит не только от масс и скоростей этих тел до удара, но и от упругих свойств. Для характеристики этих свойств в теорию удара вводится величина, называемая коэффициентом восстановления.
Рассмотрим шар, падающий вертикально и притом поступательно на неподвижную горизонтальную плиту. Для удара, который при этом произойдет, можно различить две стадии. В течение первой стадии скорости частиц шара, равные в момент начала удара V убывают до нуля. Шар при этом деформируется (плиту считаем абсолютно жесткой), и вся его начальная кинетическая энергия  переходит во внутреннюю потенциальную энергию деформированного тела. Во второй стадии удара шар под действием внутренних упругих сил начинает восстанавливать свою форму при этом его внутренняя потенциальная энергия переходит в кинетическую энергию движения частиц шара. Однако полностью механическая энергия шара при этом не восстанавливается, так как часть ее уходит на сообщение шару остаточных деформаций и его нагревание. Поэтому скорость шара и в конце удара будет меньше скорости V.
переходит во внутреннюю потенциальную энергию деформированного тела. Во второй стадии удара шар под действием внутренних упругих сил начинает восстанавливать свою форму при этом его внутренняя потенциальная энергия переходит в кинетическую энергию движения частиц шара. Однако полностью механическая энергия шара при этом не восстанавливается, так как часть ее уходит на сообщение шару остаточных деформаций и его нагревание. Поэтому скорость шара и в конце удара будет меньше скорости V.
В рассмотренном случае скорость шара до удара была направлена по нормали к плите, такой удар называется прямым. Величина k, равная при прямом ударе тела о неподвижную преграду отношению модуля скорости тела в конце удара к модулю скорости в начале удара, называется коэффициентом восстановления при ударе:
 . (5)
. (5)
Значение коэффициента восстановления для разных тел определяется опытным путем. По данным опыта, при изменении скорости V не в очень больших пределах величина k зависит только от материала соударяющихся тел. Так как u< V , то для реальных тел k < 1.
В качестве предельного рассматривают случай абсолютно упругого удара (k = 1), при котором механическая энергия тела после удара полностью восстанавливается, и случай абсолютно неупругого удара (k = 0), когда удар заканчивается в первой стадии и вся механическая энергия тела расходуется на его деформацию и нагревание.
§
Величина k определяется экспериментально. Рассмотрим, например, шар, свободно падающий на плиту с предварительно измеренной высоты Н. Определим высоту его подъема h после удара.
Тогда по формуле Галилея  , а
, а  и, следовательно,
и, следовательно,  .
.
Для некоторых материалов значения коэффициента восстановления (при скоростях соударения порядка 3 м/сек)составляют: дерево о дерево – 0,5, сталь о сталь – 0,56, слоновая кость о слоновую кость – 0,89, стекло о стекло – 0,94.
Прямой центральный удар двух тел (удар шаров)
При соударении двух тел удар называется прямым и центральным, если общая нормаль к поверхностям тел в точке касания проходит через их центры масс и если скорости центров масс в начале удара направлены по этой общей нормали. Таким, в частности, будет удар двух однородных шаров, центры которых до удара движутся вдоль одной и той же прямой. В противном случае удар называется косым.
Обозначим массы соударяющихся тел т1 и т2, скорости их центров масс в начале удара V1 и V2, а в конце удара – u1 и u2. Проведем через центры масс C1 и С2 координатную ось х, направленную всегда от C1 к С2 . Тогда, чтобы произошел удар, должно быть выполнено условие  (иначе первое тело не догонит второе). Кроме того, должно выполняться условие
(иначе первое тело не догонит второе). Кроме того, должно выполняться условие  , так как ударившее тело не может опередить ударяемое. Легко проверить, что эти неравенства выполняются и в случаях, когда оба тела движутся влево или навстречу друг другу.
, так как ударившее тело не может опередить ударяемое. Легко проверить, что эти неравенства выполняются и в случаях, когда оба тела движутся влево или навстречу друг другу.
Считая m1, т2, и k известными, найдем
и k известными, найдем  . Для этого применим теорему об изменении количества движения к соударяющимся телам, рассматривая их как одну систему. Тогда ударные силы, действующие между телами, будут внутренними, и имеет место выражение
. Для этого применим теорему об изменении количества движения к соударяющимся телам, рассматривая их как одну систему. Тогда ударные силы, действующие между телами, будут внутренними, и имеет место выражение  .
.
В результате первое из уравнений (4) дает
 .
.
Второе уравнение найдем из выражения для коэффициента восстановления. При соударении двух тел интенсивность удара (ударный импульс) зависит не от абсолютного значения скорости каждого из тел, а от того, насколько скорость ударяющегося тела больше скорости тела ударяемого, т. е. от разности  (скорости сближения). Поэтому при ударе двух тел, если учесть, что всегда
(скорости сближения). Поэтому при ударе двух тел, если учесть, что всегда  , а
, а  ,получим:
,получим:
 (6)
(6)
или
 . (7)
. (7)
Уравнение (7) позволяет решить поставленную задачу. Ударный импульс, действующий на соударяющиеся тела, найдем, составив уравнение для какого-нибудь одного из тел, например, для первого:
 .
.
Последнее равенство следует из третьего закона Ньютона.
Рассмотрим два предельных случая.
Абсолютно неупругий удар (k = 0). В этом случае из уравнения (6) находим, что оба тела после удара движутся с одной и той же скоростью:
 .
.
Действующий на тело ударный импульс при этом равен
 .
.
Абсолютно упругий удар (k = 1). В этом случае будем иметь:
Действующий на тело ударный импульс при этом равен
.
Как видим, при абсолютно упругом ударе ударный импульс вдвое больше, чем при абсолютно неупругом. В частном случае, когда т1 = т2 = т, получаем
 .
.
Таким образом, два тела одинаковой массы при абсолютно упругом ударе обмениваются скоростями.
Пример.Два шара с массами т1 и т2 подвешены так, как показано на рисунке. Первый шар отклоняют от вертикали на угол a и отпускают без начальной скорости. После удара второй шар отклоняется на угол b. Найти коэффициент восстановления для шаров при ударе.
Решение.
По данным задачи можно определить скорость V1 центра первого шара в начале удара и скорость V2центра второго шара в конце удара. По теореме об изменении кинетической энергии (на перемещении первого шара) находим:
 ,
,
где  – расстояние центра шара от точки подвеса.
– расстояние центра шара от точки подвеса.
Отсюда
 .
.
Аналогично находим, что
 .
.
Вследствие того, что в нашем случае V2 = 0, имеем:

 .
.
Исключая из этих уравнений u1x и замечая, что  , а
, а  , получим:
, получим:
 .
.
Отсюда окончательно находим:
 .
.
Приведение сил инерции точки твердого тела к простейшему виду при различных видах движения. — мегаобучалка
В динамике за центр привидения принимают центр масс тела С.
 – условия равновесия.
– условия равновесия.
Согласно теореме о движении центра масс: 
Согласно теореме об изменении кинетического момента относительно неподвижного центра О и центра масс: 

 ;
; 

1)поступательное движение:
 центр привидения сил инерции (ЦП СИ)- центр масс точек С => главный вектор сил инерции:
центр привидения сил инерции (ЦП СИ)- центр масс точек С => главный вектор сил инерции:
, приложение в точке С.
Тело движется поступательно => вращения не происходит: 
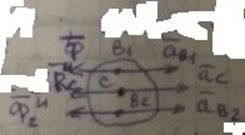
2)плоско-параллельное движение:
 тело движется в плоскости ОХУ плоско-параллельно.
тело движется в плоскости ОХУ плоско-параллельно.
ЦПСИ – точки С => ;

Если ЦПСИ – произвольно точки О 
3)вращательное движение вокруг неподвижной оси:
Тело имеет проекцию симметрии, а оси вращения проходят перпендикулярно данной проекции
а)ось вращения проходит через центр масс, то есть является главной центральной осью => ЦПСИ – точки С.
 , .
, .
б)ось вращения не проходит через центр масс, то есть является главной осью инерции тела точки О => ЦПСИ – т.О или т.С

 ,
,
.

 ,
,
Возможные перемещения механ. сист.. Идеальные связи.
Возможны перемещения – воображаемое (мысленно сообщаемое системе) бесконечно малые перемещения, при к-ых связи не нарушаются, пример:

Число независимых возможных перемещений равно числу степеней свободы.
Идеальные связи – связи,у которых сумма элементарных работ реакций связи на любом возможном перемещении равна 0:


17) принципы возможных перемещений и скоростей
Принцип Лагранта:
для равновесий мех. с/с с идеальными связями необходимо и достаточно , чтобы сумма элем. Работ всех акт. сил на любом возможном перемещении равнялась 0 :
Смысл принципа возможных перемещений заключается в том, что для решения задач статики мех. с/с сначала мысленно выводят из равновесия и подсчитывают сумму эл. работ на возм. перемещениях приравнивая её 0
Если на с/с наложены неидеальные связи( тело скользит по шорох. п-ти), то силу трения включают в число акт. сил.
Если с/с обладает 2-мя или более степенями свободы, то для неё можно составить столько уравнений возможных работ, сколько степеней свободы имеет с/с.
Общее уравнение динамики.
Мех. с/с движется, на нее наложены идеальные связи.
Основной закон динамики:
m  *a =F R
*a =F R
δr * F R Ф =0 точка формально остановлена
δr- возможное перемещение точки => δА (F ) δА (R ) δА (Ф )=0 для точки
Проссумируем: Σ δА (F ) Σ δА(Ф )=0
Σ δА (R )=0 так как связи идеальны=è
Σ δА (F
) Σ δА(Ф
)=0 -ОУД
При движении механической с/с с идеальными связями в каждый момент времени сумма работ всех активных сил и сил инерции на любом возможном перемещении мех. с/с равна нулю.
ЗАДАЧИ