
Современные воззрения на форму земли — мегаобучалка
ВВЕДЕНИЕ
В настоящее время в геодезии, навигации и других областях человеческой деятельности, где требуется определять положение объектов в пространстве, все более широкое применение находят методы, основанные на использовании искусственных спутников Земли. Благодаря высокой точности, автономности, независимости от погоды и времени суток, быстроте и простоте измерений, спутниковые технологии все чаще вытесняют традиционные и становятся основными.
Согласно принятой Федеральной службой геодезии и картографии России концепции дальнейшего совершенствования государственной геодезической сети, что будет выполняться исключительно посредством спутниковых измерений.
Спутниковые технологии имеют широкие перспективы в строительстве – при создании геодезической сети на этапе изысканий, при разбивке сооружений, нивелировании и выполнении других работ.
Форма и размеры Земли
Эволюция представлений о форме и размерах Земли
Представления о форме и размерах Земли, существовавшие в разные времена, были весьма различными, порой просто фантастичными, как, например, в Средние века. Однако мысль о шарообразности Земли высказывалась не один раз многими учеными.
Древние индусы, вавилоняне и греки считали Землю плоской или плоско-выпуклой, и что она держится на опорах. Впервые идея о шарообразности Земли была выдвинута, вероятно, халдейскими жрецами в VI в. до н.э. С таким же утверждением выступал грек Фалалей. Живший в VI в. до н.э. древнегреческий философ и математик Пифагор утверждал, что Земля, как «совершенное тело», должна иметь совершенную форму шара, а его современник Парменид объяснил, что никаких подпор у Земли нет. Великий греческий ученый Аристотель в своем трактате «О небе» привел ряд доказательств шарообразности Земли.
Что касается размеров земного шара, то попытки измерить Землю, делались не один раз. Однако первое исторически достоверное измерение Земли проделал древнегреческий ученый Эратосфен в III в. до н.э. Он заметил, что в двух египетских городах, расположенных па Ниле, в одно и то же время солнце стоит в Сиене (нынешнем Асуане) почти в зените, тогда как в Александрии светит под углом. Зная расстояние S между городами (на рис. 1 дуга сферы AС) и измерив с помощью гномона, закрепленного в полусферической чаше, угол z (зенитное расстояние), Эратосфен вычислил радиус Земли R: R = (180° × S)/(mp), z = m.
Поскольку расстояние между городами в то время измерялось в стадиях, нельзя определить, насколько точен был результат измерений Эратосфена. Стадией греки называли расстояние, которое проходил человек спокойным шагом от момента появления края солнца над горизонтом до момента появления всего его диска, что составляет примерно 158 – 185 м. Современные расчеты, выполненные при этих приблизительных значениях, дали результат R = 6 311–6 320 км, который следует признать вполне удовлетворительным, поскольку сейчас мы принимаем радиус Земли равным 6 371 км.

Рис. 1. Определение радиуса Земли Эратосфеном
В Средние века в развитии всей науки, в том числе и геодезии, наступил застой. Церковь и инквизиция передовое представление о мироздании объявили ересью. Интерес к геодезии вновь возник в эпоху Возрождения. Известные кругосветные путешествия в период Великих географических открытий подтвердили опытным путем, что Земля – шар.
И. Ньютон в опубликованном трактате в 1687 г. «Математические начала натуральной философии» утверждал, что из-за вращения вокруг своей оси Земля должна быть сплюснутой у полюсов и представлять собой сфероид или эллипсоид вращения, т. е. фигуру, которая получается, если вращать эллипс вокруг малой оси. Эта идея требовала подтверждения. Для этого Парижская академия наук организовала две экспедиции: одну в Перу, поближе к экватору, другую в Лапландию – на север Финляндии. Экспедиции должны были произвести измерения длин дуг меридианов, один градус которых, если Земля действительно сплюснута у полюсов, должен быть неодинаков на севере и на юге. Результат определений подтвердил сфероидальность Земли.
Современные воззрения на форму Земли
Физическая (топографическая) поверхность Земли образует фигуру неправильной, сложной формы. На физической поверхности встречаются самые различные неровности: горы, хребты, долины, котловины и т. д. Описать такую фигуру при помощи каких-либо аналитических зависимостей невозможно. В то же время для решения геодезических задач в конечном виде необходимо основываться на определенной математически строгой фигуре – только тогда возможно получение расчетных формул. Исходя из этого, задачу по определению формы и размеров Земли принято делить на две части:
1) установление формы и размеров некоторой типичной фигуры, представляющей Землю в общем виде;
2) изучение отступлений физической поверхности Земли от этой типичной фигуры.
Известно, что 71 % земной поверхности покрывают моря и океаны, суши – только 29 %. Поверхность же морей и океанов характерна тем, что она в любой точке перпендикулярна к отвесной линии, т. е. направлению действия силы тяжести (если вода находится в спокойном состоянии). Направление действия силы тяжести можно установить в любой точке и соответственно построить поверхность, перпендикулярную к направлению этой силы. Замкнутая поверхность, которая в любой точке перпендикулярна к направлению действия силы тяжести, т. е. перпендикулярна к отвесной линии, называется уровенной поверхностью.
В 1873 г. физик И.Б. Листинг предложил использовать для описания формы Земли понятие «геоид» (от греч. «ге» – земля и «ейдос» – вид). Таким образом получилось, что форма Земли «землеподобна».
Под геоидом понимается уровенная поверхность морей и океанов (без приливов-отливов, сгонов и нагонов), мысленно продолженная под материками. Во всех точках уровенной поверхности геоида отвесная линия перпендикулярна касательной к данной точке. Геоид – всюду выпуклая поверхность. Очевидно, что форма геоида связана с распределением масс в теле Земли, вращением ее вокруг оси, взаимодействием сил тяжести и центробежных сил. Поэтому фигура геоида оказалась достаточно сложной и, как позднее установили, принципиально неопределимой. В связи с этим выдающийся отечественный ученый М.С. Молоденский предложил перейти к поверхности «квазигеоида» (якобы «геоида»), которая однозначно определяется по наземным измерениям и совпадает с геоидом на морях и океанах, а также очень близко подходит к нему на суше.
Для научного и практического использования выбрана простая математическая аппроксимация фигуры Земли – земной эллипсоид, или эллипсоид вращения, размеры которого подбираются при условии наилучшего соответствия фигуре квазигеоида для Земли в целом или отдельных ее частей. Эллипсоид, подходящий для всей Земли, называют «общеземным эллипсоидом», а для территории отдельной страны или нескольких стран – «референц-эллипсоидом».
В 1940 г. отечественные ученые Ф.Н. Красовский и А.А. Изотов завершили вычисление размеров референц-эллипсоида для геодезических построений и картографирования территории бывшего СССР. В 1946 г. он был введен законодательно для всеобщего использования.
Параметры эллипсоида Красовского таковы:
большая полуось а = 6 378 245,000 м;
малая полуось b = 6 356 863,019 м;
сжатие а = (а – b)/а = 1:298,3;
первый эксцентриситет  = 0,08181333.
= 0,08181333.
Как видно, Земля очень мало отличается от шара с радиусом 6 371,032 км.
§
Географические координаты ввел во II в. до н. э. греческий ученый Гиппарх. Земля представлялась в то время как однородный шар.
Географическими координатами являются угловые величины, называемые широтой и долготой, определяющие положение точки земной поверхности относительно экватора и начального меридиана.
Плоскость экватора проходит через центр Земли и перпендикулярна к ее оси вращения. В качестве начального меридиана избран меридиан, проходящий через Гринвичскую обсерваторию (Англия). Однако сама Гринвичская обсерватория в настоящее время не функционирует и сохраняется лишь как историческое место. Следует заметить, что на почетную роль начального меридиана в разное время претендовали Пулковский, Парижский, Лиссабонский и другие меридианы. Плоскость любого меридиана проходит через ось вращения Земли.
Географическая долгота – двугранный угол (l) между плоскостью начального меридиана и плоскостью меридиана, проходящего через данную точку, измеряемый в экваториальной плоскости (рис. 2, а) вправо и влево от начального меридиана, т. е. долгота бывает восточная ( ) и западная (-) от 0 до 180°.
Географическая широта – угол (j) между радиусом шара, т. е. отвесной линией проходящей через данную точку, и плоскостью экватора. Широта на экваторе равна 0, на полюсах: северном 90°, на южном –90°.
Координаты, получаемые из непосредственных полевых наблюдений светил, стали называть астрономическими.
Астрономическая широта (jА) – угол, образованный отвесной линией в данной точке и плоскостью, перпендикулярной к оси вращения Земли.
Астрономическая долгота (lА) – двугранный угол между плоскостями астрономических меридианов данной точки и начального меридиана. Астрономический меридиан образуется сечением земной поверхности плоскостью, проходящей через отвесную линию в данной точке параллельно оси вращения Земли.

Рис. 2. Системы координат. Определение координат точки А:
а – географической долготы (l) и широты (j) на шаре;
б – в эллипсоидальной (В, L, Н = АА0) и
пространственной системах координат (ХА, YA, ZA)
Системы координат, применяемые в современной геодезии, можно разделить на две группы: эллипсоидальные, определяющие положение точки на поверхности эллипсоида; прямоугольные (двухмерные на плоскости, трехмерные в пространстве). К эллипсоидальным относятся геодезические координаты.
Геодезическая широта (В) – угол между нормалью к поверхности эллипсоида в данной точке и плоскостью экватора (рис. 2, б).
Геодезическая долгота (L) – двугранный угол между плоскостями геодезического меридиана (на поверхности эллипсоида) данной точки и начального меридиана.
В настоящее время географические координаты рассматриваются как обобщенное понятие об астрономических и геодезических координатах, когда уклонения отвеса от нормали к эллипсоиду не учитываются.
Геодезическую систему координат, связанную с общеземным эллипсоидом, распространенную на всю планету и предназначенную для решения научных и практических задач на планетарном или региональном уровнях, называют общеземной системой.
На поверхности Земли координатные системы закрепляют пункты геодезических сетей, которые являются их составной частью. Поэтому из-за неравномерности размещения геодезических пунктов, погрешностей измерений, особенностей их математической обработки общеземные системы координат различаются между собой.
Геодезическую систему координат, связанную с референц-эллипсоидом, распространяемую в пределах материка или территории того или иного государства, называют референцной системой.
Геодезические системы координат включают:
параметры эллипсоида;
высоту геоида над эллипсоидом в начальном пункте;
исходные геодезические даты (геодезические широта и долгота начального пункта, азимут с начального пункта на ориентирный пункт геодезической сети).
В работах по геодезии, картографии и топографии, выполняемых в СССР и затем в России, с 1946 г. принят эллипсоид Красовского (начальный пункт Пулково; превышение геоида над референц-эллипсоидом в начальном пункте равно нулю).
Размеры эллипсоида Красовского довольно близки к размерам общеземного эллипсоида, а их сжатия практически совпадают.
Эллипсоид Красовского в качестве координатной поверхности вместе с выбранными исходными геодезическими датами (координатами начального пункта геодезической сети страны и азимутом исходной стороны) образует государственную референцную «Систему координат 1942 г.» (СК-42).
В настоящее время Государственными системами геодезических координат и высот России являются система координат 1995 г. (СК-95), введенная постановлением Правительства РФ с 1 июля 2002 г., и Балтийская система высот. В качестве координатной поверхности в этой системе используется эллипсоид Красовского. За начало координат (как и в СК-42) приняты координаты центра Пулковской астрономической обсерватории, за исходный уровень отсчета высот – средний многолетний уровень Балтийского моря с исходным пунктом нивелирной сети в Кронштадте.
Положение пунктов в принятой системе координат может задаваться следующими координатами:
пространственными прямоугольными координатами X, Y, Z (направление оси Z совпадает с осью вращения отсчетного эллипсоида, ось X лежит в плоскости нулевого меридиана, а ось Y дополняет систему до правой; началом системы координат является центр отсчетного эллипсоида);
геодезическими координатами: широтой – В, долготой – L, высотой – Н. Геодезическая высота Н отсчитывается от точки на земной поверхности по нормали до поверхности эллипсоида;
плоскими прямоугольными координатами х и у, вычисляемыми в проекции Гаусса–Крюгера. Третья координата – абсолютная высота измеряется от среднего уровня Балтийского моря.
Астрономические долготы и широты, обозначаемые соответственно буквами jА и lА, получаются из прямых полевых наблюдений небесных светил, а геодезические обозначаются буквами В и L и связаны с размерами и ориентированием конкретного референц-эллипсоида в теле Земли и могут быть только вычислены. Началом координат в геодезической системе (на референц-эллипсоиде) служит точка ориентирования эллипсоида с известными астрономическими координатами (у нас в стране – это сигнал «А», т. е. центр круглого зала Пулковской обсерватории).
Геодезические координаты относятся к нормали к поверхности эллипсоида, а географические – к отвесной линии, т. е. нормали к уровенной поверхности, или к геоиду. Отвесная линия, нормаль к эллипсоиду и радиус-вектор эллипсоида, проведенные через одну и ту же точку на поверхности эллипсоида, занимают разные положения в пространстве.
Угол между отвесной линией и нормалью к поверхности эллипсоида называют уклонением отвесной линии, оно составляет от 2 – 3″ до 30 – 40″ и более в аномальных районах. Угол в 1″ на поверхности Земли соответствует дуге в 30 м. Из-за этого различия в астрономических и геодезических координатах могут колебаться от сотни метров в среднем до километра и более в аномальных районах. Поэтому для перехода от астрономических широт и долгот к геодезическим необходимо определять в разных пунктах Земли уклонения отвесных линий. Учет этих различий при расчетах обязателен для всех топографических карт. Игнорировать их можно только при мелкомасштабном картографировании.
В настоящее время в спутниковой геодезии применяются две общеземные системы координат: Всемирная геодезическая система WGS-84 и Российская система ПЗ-90 (Параметры Земли).
В системе WGS-84 начало отсчета координат задано в центре масс Земли; ось Z пространственной прямоугольной системы координат параллельна направлению на условный земной полюс (Международное условное начало МУН); ось X определяется плоскостями условного меридиана (параллелен нулевому меридиану) и экватора; ось Y дополняет систему координат до правой. Начало и положение осей этой координатной системы совпадает с геометрическим центром и осями общеземного эллипсоида WGS-84 с параметрами: а = 6 378 137 м,
a = 1:298,257 223 563, е2 = 0,006 694 380.
Система координат WGS-84, полученная в США по данным наблюдений ИСЗ, в дальнейшем неоднократно уточнялась, и с 1994 г. используется версия WGS-84 (G 730).
Система координат ПЗ-90 также является геоцентрической прямоугольной пространственной системой с началом в центре масс Земли; ось Z направлена к условному земному полюсу, а ось X – в точку пересечения плоскости экватора и нулевого меридиана. Полученные в результате модернизации геодезические параметры Земли относятся к 2002 г., поэтому новой системе дано обозначение ПЗ-90 (2002). Параметры эллипсоида в этой системе следующие: а = 6 378 136 м, a = 1:298,257 839 303, е2 = 0,006 694 6619.
Системы координат WGS-84 и ПЗ-90 весьма близки друг к другу. Так, например, размеры больших полуосей эллипсоидов различаются на 1 м.
§
В любой проекции изображение получается тем более искаженным, чем больше картографируемая территория. Поэтому прямоугольная система координат не может быть распространена на большую территорию. Приходится решать задачу по частям.
В 1825 г. К.Ф. Гаусс впервые решил общую задачу по изображению одной поверхности на другой с сохранением подобия в бесконечно малых частях. Частным случаем этой задачи является отображение поверхности эллипсоида вращения на плоскости. Предложенная К.Ф. Гауссом проекция практически не применялась. В 1912 г. А. Крюгер вывел и опубликовал рабочие формулы этой проекции. После этого проекция получила название проекции Гаусса–Крюгера и нашла широкое применение в топографо-геодезических работах.
Геометрическая интерпретация проекции Гаусса–Крюгера выглядит следующим образом. Поверхность земного эллипсоида условно делят меридианами на зоны, соответствующие 6° по долготе. Средний меридиан зоны называется осевым. Затем эллипсоид вписывается в поперечно расположенный цилиндр так, чтобы плоскость его экватора совместилась с осью цилиндра, а один из осевых меридианов оказался касательной к его боковой поверхности. Эту зону, а затем и последующие по определенному математическому закону проецируют на внутреннюю боковую поверхность цилиндра (рис. 4, а). После проецирования поверхность цилиндра разворачивают в плоскость, разрезав цилиндр по образующим, касательным земных полюсов. Спроецированные аналогично последовательно одна за другой зоны соприкасаются между собой в точках, расположенных по линии экватора, как это показано на рис. 5, а.

Рис. 4. Схема образования проекции Гаусса–Крюгера:
а – геометрическое представление получения изображения зоны;
б – спроецированное на плоскость изображение зоны
(—- – действительные размеры зоны, — – размеры зоны в проекции)
Получается, что вся поверхность Земли разбивается на 60 зон, считая от начального – Гринвичского меридиана (0°). Через каждую зону от Северного до Южного полюса проходит прямолинейный осевой меридиан зон. Долгота осевого меридиана n-й зоны равна (6n – 3)°. Нумерация зон идет с запада на восток, начиная от Гринвичского меридиана. Территория России располагается примерно в 28 зонах: от 4 до 32. В пределах каждой зоны плоская координатная система располагается самостоятельно. Оси X и Y размещаются по осевому меридиану зоны и экватору. Начало отсчета координат в их пересечении. Поскольку территория России расположена в северном полушарии, то все значения х всегда будут положительными. Значения координаты у могут быть в каждой зоне и положительными и отрицательными. Чтобы избежать этих неудобств, начало отсчета ординат искусственно сдвигают на запад на 500 км (рис. 5). Другими словами, к значению у прибавляют 500 км. Ширина полузоны по долготе составляет всего 3°, т. е. порядка 333 км, поэтому все значения у станут положительными. Поскольку в каждой зоне координаты могут совпадать, в значении у указывается также номер зоны. Например, если координаты точки даны в виде: х = 6 650 457, у = 4 307 128, то это значит, что точка расположена от экватора на расстоянии 6 650 457 м; в значении координаты у цифра 4 означает номер зоны, а от оставшегося числа следует отнять 500 000 м, тогда получим расстояние нашей точки от осевого меридиана, а именно – 192 872 м. Такие координаты называют преобразованными. Для удобства пользования плоскими координатами каждую зону покрывают сеткой квадратов, так называемой километровой сеткой (сторона квадрата равна 1 км), которая изображается на топографических картах масштаба 1:10 000; 1:25 000; 1:50 000 (на картах масштаба 1:100 000 квадраты двухкилометровые; 1:200 000 – от 4 до 10 км).

Рис. 5. Зональная система координат в проекции Гаусса–Крюгера:
а – деление поверхности Земли на зоны (1 – осевой меридиан, 2 – экватор);
б – определение плоских координат в зоне
Такая зональная система координат, принятая в качестве государственной, обеспечивает возможность построения на территории всей Земли системы плоских прямоугольных координат и позволяет получать практически без искажений довольно большие участки земной поверхности.
2.6. Искажения при изображении поверхности эллипсоида
на плоскости в проекции Гаусса–Крюгера
Представим участок земной поверхности в виде части поверхности сферы радиусом R, который заменяется частью горизонтальной плоскости. Из рис. 6 видно, что с удалением от точки m разница DS в длине дуги S и ее проекции на плоскость S’ возрастает, а расстояние между ними (высота точки местности)  увеличивается. Из данных рис. 6 получаем
увеличивается. Из данных рис. 6 получаем
 ;
;  ;
;  .
.
Сделав ряд преобразований, запишем
 . (1)
. (1)
Можно также определить значение Dh, учитывая малость Dh относительно R и близость S и S’,
 . (2)
. (2)

Рис. 6. Искажение длины линии и изменение высоты точки
при переходе от сферической поверхности к горизонтальной
Из расчетов по полученным формулам следует, что при длине линии 10 км DS составляет только 1:1 000 000 ее длины. Поэтому считается, что участок радиусом 10 км можно принять за плоский при съемке планов без рельефа. Значительно быстрее возрастают расхождения между высотами точек на сфере и на плоскости. При той же длине линии 10 км разность высот достигает уже 7,8 м, поэтому значение Dh можно не учитывать лишь при расстояниях меньше 1 км.
2.7. Полярные координаты. Связь плоской прямоугольной
и полярной систем координат
Система полярных координат может быть задана на плоскости, сфере или поверхности эллипсоида и состоит из точки М – начала координат (рис. 7) и полярной оси МA, относительно которых положение точки определяется координатами: углом положения a (дирекционный угол или румб на плоскости, азимут на сфере и эллипсоиде) и кратчайшим расстоянием S между точками М и М1, считаемым по поверхности.
За полярную ось (начальное направление) обычно принимают: на плоскости – направление, параллельное оси абсцисс прямоугольных координат, а на сфере и эллипсоиде – северное направление меридиана, проходящего через точку М.
Связь плоской прямоугольной и полярной систем координат осуществляется путем решения прямой и обратной геодезических задач.
Прямая геодезическая задача. Задача формулируется так: заданы хА и уА – плоские геодезические координаты точки А (рис. 8). Измерено непосредственно в натуре расстояние S между точками и a – угол положения (направления). Находим приращения координат (см. рис. 8):
 ;
;  . (3)
. (3)
Получаем искомые координаты точки В:
 ;
;  . (4)
. (4)
Обратная геодезическая задача. Заданы хА и уА; хB и уB – координаты точек А и В (см. рис. 8). Следует найти угол положения и расстояние SAB. Из рисунка видно, что
 ;
;  ; (5)
; (5)
 . (6)
. (6)
§
По рекомендации Международного астрономического союза с 1991 г. введены три шкалы времени: барицентрическое координатное время
(ТСВ) – время, которое показывали бы часы, будучи помещенными в барицентр Солнечной системы; геоцентрическое координатное время (TCG) – время, которое показывали бы часы, будучи помещенными в центр масс Земли; земное время (ТТ) – время, которое показывают часы в пунктах земной поверхности, расположенных на уровне моря на широте 45°.
За основную единицу измерения времени принимается продолжительность одного полного оборота Земли вокруг своей оси, называемая сутками.
В зависимости от принятого начала отсчета и используемых единиц в астрономии различают две системы измерения времени: звездную и солнечную.
Из-за неравномерности вращения Земли и постоянно возрастающих требований науки и техники было введено равномерно текущее, так называемое, эфемеридное, время, связанное не с суточным вращением Земли, а с годичным движением Земли вокруг Солнца – тропическим годом. Единицы эфемеридного времени постоянны с точностью до 1 × 10-10. Для составления эфемерид Солнца, Луны и планет используют эфемеридное время.
С 1 января 1972 г. во всех службах времени введено атомное время (AT), не зависящее от вращения и движения Земли. За единицу атомного времени принята секунда, которая равна 9192 631770 периодам колебаний излучения, соответствующего переходу между двумя сверхтонкими уровнями основного состояния атома цезия-133. Точность атомных часов порядка 1 × 10-12. Стабильность частоты современных квантовых генераторов на атомном водороде достигает 5 × 10-14.
Все передаваемые отечественными радиостанциями сигналы времени формируются на основе единообразной системы атомного времени и шкалы, воспроизводимой Государственным эталоном времени и частоты, которая согласована со шкалой UTC МБВ (Международного бюро времени).
3. Определение местоположения
с помощью спутниковых систем
3.1. Общие сведения об определении положения точек
с использованием небесных тел и искусственных спутников Земли
Еще с доисторических времен для ориентирования человек использовал небесные светила. Обычно мореплаватели ориентировались по звездам, указывающим направление движения: зная среднюю скорость и время в пути, можно было сориентироваться в пространстве и определить расстояние до конечного пункта назначения. Однако при плохих погодных условиях сбиться с курса не представляло особого труда. С появлением компаса задача значительно упростилась, так как уменьшилась зависимость от погоды. Позднее для определения местоположения в океане, т. е. в навигации, использовались угловые наблюдения небесных тел. Но даже при самых точных угловых наблюдениях небесных тел ошибка определения местоположения этим методом составляла не менее 1 мили. Вместе с тем требуемая точность существенным образом зависит от вида работ, типа транспортного средства и условий передвижения. Например, для безопасного управления судами в открытом океане необходимая точность местоопределения составляет несколько километров, в то время как в прибрежных водах – 2 – 5 м. Аналогичны требования к точности и для воздушных судов. Во время полета над океаном требуемая точность определения высоты самолета составляет около 100 м, а при посадке на этапе глиссады для пассажирского самолета – 0,3 м.
Появление искусственных спутников Земли произвело переворот в методах геодезии и значительно повысило точность навигации и определения положения точек и объектов на поверхности Земли.
С созданием радиолокационных станций стало возможным измерять параметры движения и относительное местоположение спутника по отраженному от его поверхности лучу радиолокатора. Появилась возможность измерения параметров движения спутника по излучаемому сигналу. В 1957 г. в СССР группа ученых под руководством В.А. Котельникова экспериментально подтвердила возможность определения параметров движения искусственного спутника Земли (ИСЗ) по результатам измерений доплеровского сдвига частоты сигнала, излучаемого этим спутником. При этом была установлена возможность решения обратной задачи – нахождения координат приемника по измеренному доплеровскому сдвигу сигнала, излучаемого с ИСЗ, если параметры движения и координаты этого спутника известны. При движении спутник излучает сигнал определенной частоты, который несет информацию об его положении на орбите. Если измерить частоту принятого сигнала и сравнить ее с эталонной, то можно вычислить доплеровский сдвиг частоты, обусловленный движением спутника. При непрерывном измерении можно составить своего рода функцию изменения частоты Доплера (т. е. доплеровского сдвига частоты). Частота Доплера непрерывно изменяется и в определенный момент становится равной нулю, затем изменяет знак. В момент равенства нулю частоты Доплера приемник находится на линии, которая является нормалью к вектору движения спутника. Измерив момент времени, когда частота Доплера равна нулю, и используя зависимость крутизны кривой доплеровской частоты от расстояния между приемником и ИСЗ, можно вычислить координаты приемника. При этом спутник становится радионавигационной опорной станцией, координаты которой изменяются во времени вследствие движения спутника по орбите, но заранее могут быть вычислены для любого момента времени благодаря эфемеридной информации, заложенной в навигационном сигнале спутника.
В 1963 г. начались работы по построению первой отечественной низкоорбитальной навигационной спутниковой системы «Цикада», в 1967 г. на орбиту был выведен первый отечественный навигационный спутник «Космос-192». Для радионавигационных спутниковых систем первого поколения характерным является применение низкоорбитальных ИСЗ и использование для измерения навигационных параметров объекта сигнала одного, видимого в данный момент спутника.
Ошибка в определении координат для подвижного объект составляла ~500 м. Для неподвижного объекта эта величина уменьшается до 50 м.
Идеи использования космических аппаратов для навигации подвижных объектов в США начали развиваться после запуска в СССР 1957 году первого искусственного спутника Земли. В это время была поставлена задача слежения за советским ИСЗ посредством приема его сигнала на наземном пункте с известными координатами, выделения доплеровского сдвига несущей частоты передатчика ИСЗ и дальнейшего расчета параметров движения спутника. Одновременно решалась и обратная задача расчета координат приемника на основе обработки принятого сигнала и координат ИСЗ. На этой основе в интересах навигационного обеспечения в 1964 г. была создана доплеровская спутниковая радионавигационная система первого поколения «Transit», предназначенная для навигационного обеспечения пуска с подводных лодок баллистических ракет «Поларис». После того, как в 1967 г. эта система была предоставлена для коммерческого использования, число гражданских потребителей быстро превысило число военных. Координаты потребителя рассчитывались на основе приема и выделения доплеровского сдвига частоты передатчика одного из 6 – 7 навигационных космических аппаратов, который мог находиться в поле видимости в течение примерно 40 мин.
Так же, как и в системе «Цикада», в системе «Transit» координаты источника вычисляются по доплеровскому сдвигу частоты сигнала одного из 7 видимых спутников, которые имеют круговые полярные орбиты с высотой над поверхностью Земли ~ 100 км. Период обращения спутников «Transit» равен 107 минутам.
Спутниковые низкоорбитальные доплеровские радионавигационные системы имеют ряд существенных недостатков: это невысокая точность определения координат объектов и отсутствие непрерывности в измерениях, так как спутники имеют низкие орбиты, и поэтому время, в течение которого спутник находится в поле видимости потребителя, не превышает одного часа. Кроме того, время между прохождением различных спутников зоны видимости зависит от географической широты, на которой он находится, и может составить величину от 35 до 90 минут. Сокращение этого времени за счет наращивания числа спутников невозможно, потому что все спутники излучают сигналы на одной и той же частоте.
Для определения взаимного расположения спутников их можно синхронно наблюдать с нескольких наземных станций. Сам спутник при этом может играть пассивную роль (например, отражая луч лазера, посланный с наземной станции, обратно на ту же станцию) или активную роль (непрерывно осуществляя передачу радиосигнала). На первых этапах развития космической геодезии сигналы подавались в виде вспышек света, которые фотографировались на фоне звезд одновременно с нескольких наземных пунктов, находящихся вне прямой видимости. Положение спутника на фотографии относительно опорных звезд давало возможность определить точное направление на него с данной станции наблюдения.
В настоящее время для определения местоположения на земной поверхности обычно измеряют расстояние между наземным пунктом и спутником, а также скорость изменения этого расстояния при прохождении спутника. Расстояния рассчитывают, исходя из времени, которое затрачивает электромагнитный сигнал (лазерная вспышка или радиоимпульс) на прохождение пути от спутника до принимающей станции при условии, что скорость распространения сигнала известна. Скорость изменения расстояния между спутником и принимающей станцией определяется по величине наблюдаемого доплеровского сдвига частоты – изменения частоты сигнала, поступающего со спутника. Вводятся поправки за атмосферную задержку сигнала и рефракцию. Основной принцип спутниковой геодезии – это использование трилатерации, т. е. измеряются расстояния до спутников, являющихся точками отсчета для вычисления координат на Земле. Все остальное, что относится к системе, – всего лишь технические решения, предназначенные для облегчения этого процесса, для того чтобы выполнить его точнее и проще.
Начало этим работам, как в СССР, так и в США положило появление в 1960 году атомных часов, что позволило создать для целей навигации сеть точно синхронизированных передатчиков, передающих кодированные сигналы. Координаты приемника определялись по временным задержкам сигнала.
В том случае, когда измеряется расстояние до одного спутника с известными координатами, местоположение определяемой точки должно быть на воображаемой сфере с центром, находящимся на этом спутнике, и радиусом R, равным измеряемому расстоянию S1 (рис. 9, а).
Когда одновременно измеряется расстояние S2 до второго спутники, то область поиска сократится, так как местоположение определяемой точки будет находиться на линии пересечения двух сфер с радиусами S1 и S2, т. е. на окружности (рис. 9, б).
В случае измерения расстояния S3 до третьего спутника возможное местоположение определяется двумя точками пересечения окружности со сферой радиуса S3 (рис. 9, в).

Рис. 9. Определение местоположения точки:
а – по одному спутнику с известными координатами;
б – по двум спутникам; в – по трем спутникам
Одну из этих двух точек можно не принимать во внимание, так как одна из точек располагается слишком далеко от поверхности Земли либо имеет неправдоподобно большую скорость движения. Например, когда точно известна высота определяемой точки (например, корабли всегда находятся на уровне моря), то можно исключить одно из измерений. Одну из сфер на рисунках можно заменить на сферу с центром в центре Земли и радиусом, равным ее радиусу плюс высота. Некоторые приемники могут быть переключены в режим определения двух горизонтальных координат.
Для того чтобы определить истинное местоположение по этим двум точкам (рис. 9, в), можно измерить расстояние S4 до четвертого спутника. Можно обойтись и тремя спутниками, если логически исключить неправдоподобное решение. Различные методы наблюдений позволяют определять абсолютное и относительное положение объектов на земной поверхности. При определении абсолютного положения используется не менее трех спутников. Чтобы компенсировать разницу в точности определения времени по часам, установленным на борту спутников и на наземной станции, обычно требуется еще и четвертый спутник. Определение относительного положения пункта на земной поверхности требует одновременного наблюдения с четырех и более спутников с двух (или более) наземных станций. Для определения координат точек на земной поверхности в геоцентрической системе необходимо знать элементы орбит спутников в этой же системе, так как любые погрешности в их определении вызывают ошибки получаемых данных. Эти погрешности могут быть уменьшены путем осреднения наблюдаемых величин за несколько дней, недель или месяцев. Часть систематических погрешностей в расчетах элементов орбиты примерно в одинаковой степени вносит искажения при определении всех точек и, поэтому, при определении их взаимного положения компенсируется. Вследствие этого относительные положения точек на земной поверхности обычно определяются с большой точностью. В зависимости от числа одновременно работающих принимающих станций и одновременно наблюдаемых спутников можно получать определенные различия между принимаемым и передаваемым сигналами; это позволяет исключить влияние неизвестных факторов. В спутниковых методах определения местоположения измерение расстояний до спутников осуществляется по измерениям времени прохождения радиосигнала от космического аппарата до приемника. При этом передающее устройство размещено на спутнике, а приемник – на определяемой точке. Радиосигнал проходит измеряемое расстояние S от спутника (передатчика) до приемника за время х. Время излучения и время приема данного сигнала точно определяют синхронизированными часами, которые расположены на спутнике и на определяемой точке. При этом измеряемое расстояние определяют по формуле:
 . (7)
. (7)
Так как скорость v радиоволны составляет около 300 000 км/с, то для обеспечения геодезической точности измерений необходимо измерять время с точностью 10-10 – 10-12 с. Главной трудностью при измерении времени распространения радиосигнала является точное выделение момента времени, в который сигнал передан со спутника.
Для обеспечения высокой точности измерений синхронизируют опорные генераторы передатчика (спутника) и приемника. В светодальномерных и радиодальномерных измерениях используются импульсные и фазовые методы измерения расстояний, а также их сочетания. Данные методы используются в спутниковых дальномерных измерениях. При этом широко используются кодированные сигналы.
§
Для GPSкосмический комплекс (космический сегмент или подсистема космических аппаратов (ПКА)) включает 24 искусственных спутника Земли (ИСЗ) (1994 г.) с включением в сеть трех резервных, обращающихся вокруг Земли в восьми орбитальных плоскостях. Форма орбиты – близкая к круговой с высотой над поверхностью Земли около 20213 км, чему соответствует период обращения, равный половине звёздных суток (11 ч 57 мин. 58,3 с). Угол наклонение орбиты к плоскости экватора 60 . При таком количестве и расположении спутников в любой точке поверхности Земли обеспечивается постоянная видимость от 4 до 8 ИСЗ на высоте более 15° над горизонтом.
На каждом спутнике находится следующая аппаратура. По два атомных стандарта частоты и времени – цезиевый и рубидиевый для генерирования опорной частоты fо = 10,23 Мгц с суточной нестабильностью 10-14-10-13 и формирования несущих частот радиоизлучения L1 = 154fо = 1575,42 МГц (длина волны 19 см) и L2 = 120fо = 1227,60 МГц (длина волны 24 см) и меток времени. Радиопередатчик с устройством модуляции несущих частот – для выдачи навигационной информации потребителям. Приёмник – для связи с комплексом управления. Кроме того, имеются бортовой вычислительный процессор, солнечные батареи, аккумуляторы, система ориентации и коррекции орбиты.
Спутник излучает радиосигналы на частотах L1 и L2, модулированные навигационным сообщением и кодами меток времени. Сигнал на частоте L1 модулирован P-кодом (P – от англ. protected, precise, т. е. – защищённый, точный) и C/A-кодом (C/A – от англ. clear acquisition, т. е. – свободного пользования), а на частоте L2 – только P-кодом. C/A-код имеет частоту f0/10 и повторяется каждую миллисекунду, P-код имеет частоту f0 и повторяется каждые 1,5 секунды. P-код позволяет решать навигационные задачи с более высокой точностью, но защищён от несанкционированного использования. C/A-код обеспечивает пониженную точность, но всегда открыт для всех пользователей.
Частоты L1 и L2 модулированы также сигналом, несущим информацию, называемую навигационным сообщением. Оно содержит следующие сведения:
параметры орбиты спутника, позволяющие вычислить на любой момент его прямоугольные геоцентрические координаты xs, ys, zs;
поправку времени, дрейф и ускорение спутникового стандарта частоты относительно времени системы GPS и всемирного времени;
коэффициенты уравнения для вычисления ионосферной поправки результатов измерений;
данные о техническом состоянии системы.
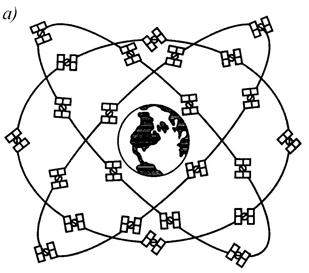
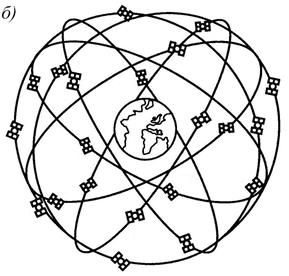
Рис. 11. Космический сегмент спутниковых «созвездий»:
а – ГЛОHACC; б – Navstar
При проектировании системы большое внимание уделялось вопросам автономного функционирования. Так, космические аппараты первого поколения обеспечивали нормальную работу системы (имеется в виду, без существенных ошибок определения координат) без вмешательства сегмента управления в течение 3 – 4 дней. В последующем этот срок был увеличен до 14 дней. В новой модификации НКА имеет возможность автономно работать в течение 180 дней без корректировки параметров орбиты с земли, пользуясь лишь автономным комплексом взаимной синхронизации спутников.
Отечественная система Глобальная навигационная спутниковая система (ГЛОНАСС), имеет 24 искусственных спутника Земли (из них 3 резервных), движущихся в трёх орбитальных плоскостях на высоте 19,1 тыс. км. Период обращения – 11 ч 15 мин. Наклонение орбит 64,8°. Излучение радиосигналов каждым спутником ведётся на двух несущих частотах: в диапазоне L1 на частоте fk1= fо1 k×Df1 и в диапазоне L2 на частоте fk2= fо2 k×Df2. Здесь k = 0, 1, … , 24; fо1 = 1602 МГц; fо2= 1246 МГц; Df1 = 562,5 кГц; Df2 = 437,5 кГц. В диапазоне L2 радиосигналы модулированы специальными кодами, которые не могут быть свободно использованы. Передаваемая спутником информация – навигационное сообщение – содержит: оцифровку меток времени спутника, сдвиг времени спутника относительно времени системы, отличие несущей частоты излучения от опорной частоты эталона времени, эфемеридную информацию (три координаты ИСЗ, три составляющих скорости и три составляющих ускорения), а также сведения о техническом состоянии всех спутников, сдвигах времени каждого спутника относительно времени системы, параметрах орбит, поправке времени системы относительно всемирного времени.
Рис. 12. Навигационный спутник:
а – ГЛОНАСС; б – Navstar GPS
Каждый спутник (рис. 12) имеет солнечные источники питания и работающие в буферном режиме аккумуляторные батареи. В «период затмения», когда спутник находится на теневой стороне планеты, используется энергия батареи, поскольку на солнечные панели не падает свет. Кроме того, поддерживается связь между ведущей станцией и удаленными станциями сегмента управления и контроля. Внутри корпуса, помимо радиотехнической аппаратуры и инерциальной системы для ориентирования спутника, установлен реактивный двигатель с запасом топлива, предназначенный для корректировки орбитального положения спутника в течение всего срока эксплуатации (5 – 15 лет). На спутнике также имеется радиоприемное устройство для приема информации, передаваемой с земли сегментом управления и контроля.
Созвездие Galileo создается с учетом опыта эксплуатации Navstar и ГЛОНАСС. Galileo будет состоять из 30 спутников в трех орбитальных плоскостях, каждая – с девятью спутниками, равномерно распределенными в пределах круговой орбиты и тремя активными резервными спутниками, которые необходимы в случае их отказа.
Сравнительные характеристики систем ГЛОНАСС, GPS и Galileo приведены в табл. 1.
Таблица 1
§
Как уже отмечалось, определение местоположения точки на земной поверхности осуществляется по спутникам, положение которых известно. При абсолютном методе определения координат, когда используются данные только одного приемника, ошибка определения координат будет такого же порядка, что и точность определения параметров орбиты.
Как правило, параметры, используемые для вычисления орбит, нестабильны и требуют постоянного уточнения. Спутники, используемые для этих целей, находятся на высоких орбитах, где влияние атмосферы на движение спутника не сказывается. Поэтому полет спутника по орбите вокруг Земли описывается простыми математическими соотношениями. Спутники выводятся на свои орбиты достаточно точно. Так как торможение из-за влияния атмосферы отсутствует, то изменения орбиты и периода обращения в течение длительного времени достаточно малы и вызваны такими явлениями, как гравитационное притяжение Луны и Солнца, солнечное световое давление на спутник и другими факторами. Несмотря на незначительную величину, все эти силы могут вносить существенные изменения в орбиту космического аппарата. Существует также множество других сил, таких как эффект сопротивления среды, но они настолько малы, что их можно не учитывать.
Моделирование сил, оказывающих сильный возмущающий эффект на орбиты спутников, важно на этапах разработки системы, ее эксплуатации и проведения научных исследований. Спутники отслеживаются относительно небольшим числом наземных станций, и поэтому число измерений, используемых для прогнозирования орбит, соответственно, мало. Для высокоточного вычисления параметров орбит используют эмпирические параметры и аналитическую модель, базирующуюся на всех доступных данных о конструкции и ориентации космического аппарата. Применение аналитической модели расширяет возможности понимании работы системы и помогает спрогнозировать ее работу в любой момент срока эксплуатации. Это позволяет повысить точность прогнозирования параметров орбит и уменьшить число станций слежения, необходимых для эксплуатации системы (следовательно, снизить ее стоимость), а также увеличить «время действия» спрогнозированных орбит. Фактические орбиты спутников вычисляют, опираясь на измерения дальности и моделирования сил, а также прогнозируя их изменения. Орбиты известны заранее, а каждый приемник имеет в памяти своего компьютера «альманах», т. е. постоянно обновляемый справочник, где содержится информация о местоположении каждого спутника и любой момент времени.
Навигационные спутники не располагаются на геостационарных орбитах подобно телевизионным спутникам. Обращаясь вокруг планеты один раз за 12 ч, они проходят над контрольными станциями дважды в сутки. Это дает возможность точно измерять их положение, высоту и скорость. Отклонения от теоретических орбит, которые обнаруживают контрольные станции, называются «ошибками эфемерид». Они обычно очень незначительны, и вычисленные поправки к орбите передаются обратно на спутник, заменяя собой в памяти его бортового компьютера прежнюю информацию. Каждый спутник вместе с дальномерными кодовыми сигналами непрерывно передает на Землю эти поправки о своем, точно вычисленном положении на орбите и движении остальных спутников данного созвездия. Кроме того, передается различная служебная информация. На земле определяются параметры движения спутников и прогнозируются значения этих параметров на заранее определенный промежуток времени. Параметры и их прогноз закладываются в навигационное сообщение при передаче спутнику навигационного сигнала. Одновременно передаются частотно-временные поправки бортовой шкалы времени спутника относительно системного времени. Измерение и прогноз параметров движения спутников производятся по результатам траекторных измерений дальности до спутника и его радиальной скорости. В течение 30 – 40 мин. выполняется анализ работоспособности спутника и, в случае необходимости, осуществляется соответствующая корректировка путем введения поправок в модель или в навигационные данные. Каждые 24 часа производится загрузка навигационных данных, состоящих из прогнозированных орбит и поправок часов для каждого спутника. Если спутник находится в зоне видимости, срочные загружаемые команды могут быть выполнены в течение нескольких минут.
Для определения и прогнозирования пространственного положения спутников и расхождения их шкал времени с временной шкалой системы, а также для приема и анализа телеметрической информации о состоянии бортовых систем служит сегмент управления и контроля для каждой спутниковой системы. Он состоит из одной ведущей станции управления и нескольких станций слежения, расположенных в различных точках земного шара. Станции слежения ведут траекторные и временные измерения.

Рис. 13. Взаимодействие различных станций,
входящих в сегмент управления и контроля
Ведущая станция объединяет операторов и наблюдателей станций слежения, рассредоточенных по всей планете (рис. 13). Она собирает информацию от станций слежения, формирует массив служебной информации (альманах, эфемериды, частотно-временные поправки) и программу управления бортовыми средствами. Загружающая станция пересылает в бортовые запоминающие устройства служебную информацию и программу управления, а также ведет оперативное управление работой бортовых средств каждого из спутников.

Рис. 14. Сегмент наземного комплекса управления системы ГЛОНАСС:
ЦУС – центр управления системой ГЛОНАСС; ЦС – центральный синхронизатор; КС – контрольная станция; СКФ – система контроля фаз; КОС – квантово-оптическая станция; АКП – аппаратура контроля параметров; КСС – контрольная станция слежения
Все спутники находятся под постоянным контролем. Современные технические средства, установленные на станциях слежения, позволяют определять местоположение искусственных спутников с высокой точностью в любом месте Земли и в течение суток. На рис. 14 показана схема станций слежения, управления и контроля, расположенных по всей территории России. В задачи сегмента входит контроль правильности функционирования космических аппаратов, непрерывное уточнение параметров орбит и выдача на спутники временных программ, команд управления и навигационной информации. Этот сегмент также включает навигационные приемники и устройства обработки, предназначенные для приема навигационных сигналов спутников ГЛОНАСС и вычисления координат, скорости и времени.
В США главная управляющая станция (Master Control Station – MCS) для созвездия Navstar, с которой осуществляется управление GPS в мировом масштабе, находится на базе ВВС Шривер, шт. Колорадо, США (рис. 15).

Рис. 15. Сегмент наземного комплекса управления системы GPS:
n – главная управляющая станция; l – станции слежения; p – наземные антенны
Эта станция обслуживает порядка 200 различных спутников, принадлежащих США и обеспечивающих связь, навигацию, наблюдение и определение погоды. (Всего в космосе функционирует более 500 спутников.) Помимо пяти станций слежения, которые находятся на островах Кваджалейн и Гавайях в Тихом океане, на острове Вознесения, на острове Диего-Гарсия в Индийском океане, а также в Колорадо-Спрингс, планируется создание еще одной станции наблюдения на мысе Канаверал, шт. Флорида. К сети имеющихся станций наблюдения добавляются еще шесть станций Национального управления картографирования (NIMA). Информация со станций наблюдения, которые используют приемники GPS, передается на главную управляющую станцию, обрабатывается и используется для обновления эфемерид спутников и создания модели параметров спутника. Наземные антенны служат для приема данных о функционировании спутников (телеметрии) и для передачи команд и обновленной навигационной информации на спутники. За сутки проводится 70 – 80 контактов с созвездием спутников, во время которых выполняются тесты функционирования подсистем.
Кроме того, в случае отклонения от штатной работы космического аппарата предпринимаются необходимые действия по корректировке режима работы тепловых, электрических и механических устройств спутника. О планируемых остановках в работе сообщается за 96 ч до перевода спутника в автономный режим. Корректировка положения спутника в плоскости орбиты с использованием небольших двигателей-ускорителей осуществляется в основном один раз в год, однако при необходимости может производиться и чаще. Если спутник отработал полностью, то он отводится на расстояние 1,1 тыс. км от стандартной орбиты для вывода его из созвездия.
Сегмент потребителя
Сегмент потребителя представляет собой комплект спутникового оборудования, позволяющий получать координаты пункта наблюдений, точное время, а также скорость и направление перемещения объекта. Во время работы осуществляется прием радиосигналов со спутников, регистрируются определяемые величины, производится предварительная обработка результатов непосредственно в полевых условиях, и затем в камеральных условиях выполняется окончательная обработка (так называемая «постобработка») материалов, позволяющая получить окончательные значения величин, интересующих потребителя. Спутниковая аппаратура может быть использована для военных целей и поэтому должна работать оперативно и надежно при ведении боевых действий. При этом создаются условия, при которых использование системы позиционирования было бы недоступно для потенциального противника. Гражданское применение спутниковой аппаратуры ориентировано на ее использование в навигации, а также в геодезии.
Спутниковая геодезическая аппаратура состоит из целого набора аксессуаров. В комплект одного спутникового приемника входят: антенна, приемник, контроллер (управляющее устройство), блок питания (для зарядки аккумуляторов и питания от сети), аккумуляторы или батареи, кабели, штатив или вешка, а также устройства крепления или установки антенны на них, рюкзак или кейс, чехлы и пр. оснащение. При работе в режиме реального времени необходим радиомодем с блоком питания и радиоантенна. Для обработки результатов наблюдений – компьютер и программное обеспечение.
К настоящему времени разработаны десятки типов аппаратуры пользователя для морской и воздушной навигации, геодезии и других целей. Уже функционируют десятки тысяч приёмников сигналов спутников системы GPS.
Навигационные определения координат с использованием P-кода обеспечивают точность автономного (без привязки к опорным пунктам) непрерывного знания координат места с точностью ~3 – 5 м. Точность определений с использованием C/A-кода ниже – ~30 – 50 м. Точность в обоих случаях ограничивается погрешностями измерения времени поступления на приемник пользователя излучённых спутником C/A и P-кодов, влиянием на результаты измерений условий распространения радиосигналов, ошибками определения орбиты. Большей точности (1 – 2 м) достигают, используя дифференциальный метод измерений, когда определяется положение одного пункта относительно другого.
Такая точность в полной мере удовлетворяет нужды морской и воздушной навигации. Благодаря легкости и малым габаритам приёмников GPS, они находят применение в геологии, рекогносцировочных изысканиях, туризме, военном деле, в оборудовании автомобилей.
При использовании системы для решения геодезических задач, выполняя измерения непосредственно на несущих частотах L1 и L2 и применяя дифференциальный метод, достигают очень высокой точности – около 1:1000 000 расстояния между пунктами.
В настоящее время спутниковые приемники выпускают более 400 фирм, и они характеризуются сравнительно большим разнообразием, но отличительные особенности приемных устройств, выпускаемых различными фирмами, в большинстве случаев, носят непринципиальный характер.
3.3. Определение координат измерением псевдодальностей
с помощью кодов
Задачей глобальной спутниковой системы является определение координат объектов (судов, самолётов, объектов на суше). При всём разнообразии выпускаемых приборов в состав аппаратуры пользователя всегда входят: антенный блок, блок приёмника и вычислительно-управляющий блок, оформляемые часто в виде единого прибора, который для краткости будем называть приёмником. В таком приёмнике, как и на спутнике, имеется датчик частот L1 и L2 (бывают и одночастотные приёмники) и измеритель времени – часы. Также генерируются подобные спутниковым C/A- и P-коды (последний – если доступ к нему санкционирован, то есть известны правила его формирования, изменяемые каждую неделю).

Рис. 16. Двоичные синхронные сигналы,
вырабатываемые передатчиком спутника (а) и приемником (б)
Приемник измеряет интервал времени между формированием собственного кода и поступлением кода от спутника. Если бы часы приёмника были точно синхронизированы с часами спутника, то формирование кодов везде происходило бы одновременно, и интервал времени между появлениями на приёмнике собственного кода и кода, пришедшего от спутника, был бы равен времени движения сигнала от спутника до приёмника, что позволило бы, измерив его, вычислить расстояние спутник – приёмник. Однако показания часов спутника и приёмника расходятся на некоторую величину ds – di , где ds – поправка часов спутника и di – поправка часов приёмника. Поэтому расстояние r от приёмника до спутника равно
r = R c(ds – di) dion, (8)
где R – измеренное значение расстояния, существенно отличающееся от верного и потому называемое псевдорасстоянием; c – скорость света; dion – задержка сигнала в ионосфере и тропосфере.
Задержка сигнала в ионосфере ослабляется особым комбинированием измерений, выполненных на двух разных частотах (что делает двухчастотные приемники более точными), или введением поправки, вычисляемой с использованием параметров, содержащихся в навигационном сообщении. Меньшая по величине тропосферная задержка исключается введением поправки, вычисляемой по метеорологическим данным.
Поправку ds часов спутника, ежесуточно контролируемую наземным комплексом системы, можно считать известной, а остаточную погрешность в ней – малой по сравнению с неизвестной поправкой часов приёмника. Учитывая названные поправки, получим: r = R – cdi.
Для определения координат пункта i измеряют несколько псевдорасстояний R до разных спутников s и в разные моменты времени t.
Чтобы различать в дальнейшем результаты измерений и другие переменные, относящиеся к разным пунктам, спутникам и моментам времени, при соответствующих обозначениях будем указывать в нижнем индексе знак определяемого пункта, в верхнем индексе – имя спутника, а в скобках – момент времени (эпоху). Например, расстояние от пункта i до спутника s в эпоху t запишется так:  .
.
Перенеся измеренные величины в левую часть равенства, а определяемые – в правую, для соответствующего псевдорасстояния напишем уравнение
 , (9)
, (9)
где
 . (10)
. (10)
В уравнении (9) неизвестными являются: xi, yi, zi, di(t). При числе наблюдаемых спутников ns и числе эпох измерений nt общее число уравнений (9), равное числу выполненных измерений, будет nsnt. Решением системы таких уравнений находят координаты пункта i и поправку часов di(t). Полагая приёмник i неподвижным, а смещение часов изменяющимся, находим, что число неизвестных равно 3 nt (3 координаты и nt поправок часов). Для определения названных неизвестных необходимо, чтобы число измерений было не меньше числа неизвестных, т. е. nsnt ³ 3 nt. Так, если измерения ведутся на 4 спутника (ns = 4), то должно соблюдаться неравенство 4nt ³ 3 nt, из которого видно, что для определения координат приёмника достаточно одной эпохи измерений. Легко проверить, что при наблюдении двух спутников необходимы две эпохи измерений.
При использовании C/A-кода погрешность измерения псевдорасстояний составляет несколько метров, а при использовании P-кода – доли метра. К этой погрешности добавляются погрешности координат спутников, остаточные погрешности влияния ионосферы и другие. В результате координаты получают с помощью С/А-кода с точностью 25 – 30 м, а с помощью Р-кода – 3 – 5 м.
§
Измерения высокой точности выполняют непосредственно на несущих частотах L1 и L2, имеющих длины волн 19 и 24 см соответственно. В приёмнике пользователя измеряется сдвиг по фазе между частотой собственного датчика и частотой, поступившей от спутника.
Этот сдвиг связан с измеряемым расстоянием следующим образом. Рассмотрим измерения на одной из двух частот, например на частоте L1. Период колебания равен T = 1/L1. За время T сигнал проходит расстояние cT = l, где c – скорость света и l – длина волны. Пока сигнал преодолевает всё расстояние от спутника до приёмника, проходит время, равное стольким же периодам T, сколько длин волн l укладывается в названном расстоянии.
Приёмник генерирует такую же частоту и выполняет измерение сдвига между собственными и принятыми от спутника колебаниями. Если бы колебания на спутнике и приёмнике были синхронизированы, то полное смещение между двумя колебаниями соответствовало бы времени пробега сигналом расстояния спутник – приёмник, состоящему из некоторого целого числа N периодов плюс доля периода. Это означало бы, что расстояние спутник – приёмник состоит из того же числа N длин волн плюс доля волны. Целое число N называют неоднозначностью расстояния, его измерить невозможно. Измеряют только дробную часть – сдвиг F по фазе между собственной частотой приёмника и частотой сигнала, принятого от спутника.
Учитывая несинхронность часов на спутнике и приёмнике и влияние ионосферы, напишем уравнение расстояния r от спутника до приёмника:
r = (N F)l cDd dion, (11)
где Dd = ds – di – смещение между показаниями часов спутника и приёмника (разность их поправок).
Разделим обе части уравнения на длину волны l, применим прежнюю систему индексов и перенесём измеренный сдвиг по фазе в левую часть уравнения, а все неизвестные – в правую. Получим
 =
=  –
–  – fs
– fs –
–  , (12)
, (12)
где  – частота излучения (
– частота излучения (  ); – неоднозначность в расстоянии от пункта i до спутника s.
); – неоднозначность в расстоянии от пункта i до спутника s.
Из-за движения спутника расстояние до него непрерывно меняется, отчего непрерывно изменяется сдвиг по фазе, и периодически – целое число волн в измеряемом расстоянии. Приёмник не только измеряет постоянно меняющийся сдвиг по фазе, но и считает число переходов фазы через ноль, изменяющее число целых волн в расстоянии. Это число прибавляется к измеряемому сдвигу, отчего суммарный сдвиг по фазе F оказывается неправильной дробью, а неизвестное число неоднозначности остаётся постоянным для всех расстояний от пункта i до спутника s.
Фазовые измерения выполняют с точностью 1 – 2° (весь фазовый цикл равен 360°), следовательно, при длинах волн l, равных 19 и 24 см, точность измерений составляет доли миллиметра.
Введя поправки за смещение часов на спутнике и за задержку сигнала в ионосфере, запишем
= – fs . (13)
. (13)
При числе наблюдаемых спутников ns и числе эпох измерений ntчисло измерений и, стало быть, уравнений (13) будет равно ns×nt.
Выполнив достаточное число измерений, решением системы уравнений (13) можно определить координаты пункта i и поправки часов приёмника на моменты измерений. Но, несмотря на высокую точность фазовых измерений, реализовать её в полной мере не удаётся, – точность теряется из-за погрешностей орбит спутников и неполностью устранённого влияния ионосферы.
§
Если фазовые измерения псевдодальностей до одного и того же спутника выполнены одновременно в двух пунктах, то они содержат очень близкие по величине погрешности орбиты и внешней среды. Разности таких измерений практически лишены указанных погрешностей. Поэтому, используя разности фаз, удаётся с высокой точностью определять положение одного пункта относительно другого. Рассмотрим возникающие при таком подходе фазовые уравнения.
Первые разности фаз.Пусть в пунктах A и B выполнены фазовые измерения на один и тот же спутник s. Рассмотрим результаты измерений на обоих пунктах, относящиеся к одному и тому же положению спутника, то есть – к одному моменту спутникового времени. Благодаря наличию в излучаемом спутником сигнале меток времени это возможно.
Составим для обоих измерений уравнения вида (13), при этом в одном уравнении вместо индекса i, обозначающего номер пункта, будем иметь A, а в другом – B. Образуя разность этих уравнений, получим уравнение разности фаз

 . (14)
. (14)
Обозначая в полученном выражении для краткости каждую разность одним символом с двумя соответствующими нижними индексами, запишем
 . (15)
. (15)
Пусть координаты одного из пунктов, например A, известны. Тогда неизвестными в уравнении (15) будут входящие в  три координаты x, y, z пункта B, постоянное для спутника s и пунктов A и B целое число
три координаты x, y, z пункта B, постоянное для спутника s и пунктов A и B целое число  и новая для каждой новой эпохи измерений разность смещений часов
и новая для каждой новой эпохи измерений разность смещений часов  . Таким образом, число неизвестных равно 3 ns nt. При числе наблюдаемых спутников ns и числе эпох ntчисло уравнений разностей фаз будет равно nsnt. Чтобы число уравнений было не меньше числа неизвестных, должно выполняться неравенство nsnt ³ 3 ns nt, из которого следует, что число эпох измерений при наблюдении четырёх спутников должно быть не меньше, чем 3. А при использовании двух спутников – не меньше, чем 5.
. Таким образом, число неизвестных равно 3 ns nt. При числе наблюдаемых спутников ns и числе эпох ntчисло уравнений разностей фаз будет равно nsnt. Чтобы число уравнений было не меньше числа неизвестных, должно выполняться неравенство nsnt ³ 3 ns nt, из которого следует, что число эпох измерений при наблюдении четырёх спутников должно быть не меньше, чем 3. А при использовании двух спутников – не меньше, чем 5.
Вторые разности. Если в пунктах A и B выполнены измерения на два спутника (s и k), то, записывая первые разности фаз, получим два уравнения вида (15):
;
 .
.
Вычитая из второго уравнения первое и вновь обозначая разности одним символом, но с двумя верхними индексами, и учитывая, что  , запишем
, запишем
 . (16)
. (16)
Получили уравнение, в котором уменьшено число неизвестных и, в частности, исключены систематические ошибки смещений часов приёмников A и B. В каждую эпоху наблюдений двух спутников с двух пунктов формируется такое уравнение. Неизвестными в уравнении (16) являются три координаты x, y, z пункта B и число N.
При числе наблюдаемых спутников ns и числе эпох nt можно составить (ns – 1)nt независимых разностей фаз. Значит, число таких уравнений будет равно (ns – 1)nt, а число неизвестных – 3 (ns – 1). Теперь, чтобы число уравнений оказалось не меньше числа определяемых неизвестных, при наблюдении четырёх спутников число эпох должно быть не меньше чем 2, а при наблюдении двух спутников – не менее чем 4. Решая такую систему уравнений, вычисляют координаты xB, yB, zB пункта B и ns – 1 чисел N.
Третьи разности. Выполнив в две эпохи t1 и t2 измерения, аналогичные тем, которые позволили составить уравнение (16), получим два таких уравнения:
 ;
;
 .
.
Образуя их разность, освобождаемся от неоднозначностей N и получаем уравнение
 , (17)
, (17)
где


и

–  .
.
Число неизвестных ещё уменьшено и теперь равно трем, – это координаты пункта B,а число уравнений равно (ns – 1)(nt – 1). Необходимое неравенство (ns – 1)(nt – 1) ³ 3 приводит к условию nt ³ (ns 2)/(ns – 1), означающему, как и в предыдущем случае, необходимость выполнения при контакте с четырьмя спутниками не менее двух эпох измерений, а при контакте с двумя спутниками – не менее четырёх эпох.
§
При приеме сигналов от пяти или большего количества спутников определение положения аппаратуры потребителя может обеспечиваться со значительной избыточностью, что допускает обнаружение недопустимых сигналов и использование данных от спутников с лучшим расположением.
Однако некоторые источники ошибок, возникающих при работе GPS, являются трудно устранимыми.
Задержки распространения сигнала в ионосфере и тропосфере. Описанный выше алгоритм предполагает, что сигнал распространяется с непрерывной скоростью, которая равна скорости света. Однако в реальности скорость света является константой только в вакууме. Когда сигнал проходит через ионосферу (слой заряженных частиц на высоте 130 – 290 км) и тропосферу (от 8 до 13 км от поверхности Земли), его скорость распространения уменьшается, что приводит к ошибкам в измерении дальности. В современных GPS приёмниках используют различные алгоритмы (модели) для минимизации влияния этих задержек. Однако, используемые в настоящее время модели могут устранить только половину из возможной 70 нс задержки, что приводит к значительным (до 10 м) ошибкам в определении местоположения приемника.
Ошибки спутниковых часов, неисправленные сегментом управления, могут приводить к ошибкам положения приемника порядка одного метра.
Ошибки в эфемеридных данных обычно незначительны и тщательно отслеживаются со станций слежения, однако также могут приводить ошибкам в положении аппаратуры потребителя порядка 1 м.
Многолучевая интерференция также вносит ошибки в определение местоположения с помощью GPS. Это происходит, когда сигнал отражается от объектов, расположенных на земной поверхности, что создаёт заметную интерференцию с сигналами приходящими непосредственно со спутников. Специальная техника обработки сигнала и продуманная конструкция антенн позволяет свести к минимуму этот источник ошибок. Однако при работе в городских условиях ошибки, вносимые многолучевой интерференцией, могут осложнить производство работ. Оценочное снижение точности в положении приемника из-за этого явления – порядка 0,5 м.
До 1 мая 2000 года министерство обороны США использовало искусственное снижение точности спутникового сигнала для гражданских и неавторизированных пользователей – избирательный доступ (Selective Availability или S/A). Это приводило к тому, что точность полученных координат с помощью C/A-кода (30 метров) преднамеренно снижалась до 100 метров. Однако по решению президента США «Избирательный Доступ» был отключен. Кроме того, S/A можно исключить, применяя технику дифференциальной коррекции.
Шум и систематические ошибки смещения, объединяясь, приводят к типичным ошибкам расстояния около пятнадцати метров для каждого из спутников.
Геометрический фактор – геометрическое понижение точности GDOP (Geometric Dilution of Precision)
Ошибки GPS изменяются в зависимости от взаимного расположения спутников, используемых в навигационном решении, и приемника. Объем фигуры, описанной единичными векторами от приемника до спутников, используемых в навигационном решении, обратно пропорционален параметру GDOP.
Плохой GDOP (большое значение) – углы от приемника до множества используемых спутников одинаковы (рис. 17).
GDOP вычисляется из геометрических связей между положением приемника и положениями спутников, которые приемник использует для навигации, с использованием параметров из процесса навигационного решения. Ошибки дальностей до спутников умножаются на соответствующий коэффициент GDOP для оценки положения или ошибки времени.
§
Все приемники, получившие распространение в практике производства инженерных работ, можно условно разделить на две обширные группы.
К первой группе относят приемники, работающие по принципу последовательного (поочередного) отслеживания и измерений расстояний до навигационных спутников рабочего созвездия.
Ко второй группе, – приемники, отслеживающие и обеспечивающие измерение расстояний одновременно до четырех и более навигационных спутников, т. е. ведущие измерения параллельно.
Внутри каждой из этих двух групп существует большое разнообразие приемников различного назначения и конструктивных особенностей.
Одноканальные приемники, наиболее экономичные и дешевые, используют в тех случаях, когда не требуется вести измерения «в режиме реального времени», т. е. непрерывно и не требуются измерения скорости объекта, на котором установлен приемник. Прежде чем вычислить координаты местоположения, одноканальный приемник должен выполнить последовательно четыре отдельных измерения до четырех различных спутников. Вся операция по определению координат одной точки может занимать от 2 до 30 с, что во многих случаях может оказаться вполне приемлемым.
Тем не менее одноканальным приемникам свойственны некоторые недостатки:
с помощью такого приемника нельзя производить измерения с подвижного объекта (например, с автомобиля при кинематической съемке плана и продольного профиля автомобильной дороги);
в ходе каждого цикла из четырех измерений приемник должен оставаться неподвижным;
работа одноканальных приемников по определению координат прерывается в моменты, когда навигационные спутники передают свои информационные сообщения, прием и расшифровка каждого из которых занимает около 30 с.
Двухканальные приемники работают по следующему принципу. Когда один канал приемника производит обработку результатов временных измерений до одного спутника, другой канал устанавливает радиоконтакт с очередным спутником для проведения измерений. Закончив цикл частичной обработки данных, первый канал мгновенно переключается на измерения до очередного спутника без потери времени на его «захват» и «прослушивание». Тем временем второй канал, называемый административным, обращается к следующему спутнику и т. д. Административный канал используется для приема информационных сообщений спутников без прерывания процесса определения координат местоположения и может быть использован для обработки временных измерений. Кроме того, современные двухканальные приемники программируются для слежения за более чем четырьмя спутниками и в тех случаях, когда за одним из рабочих спутников теряется контроль, мгновенно используется другой, без перерыва процесса определения координат. Все это существенно ускоряет работу приемников.
Многоканальные приемники (непрерывного слежения). Такие приемники одновременно отслеживают 4 и более спутников. Многоканальные приемники, используемые при производстве инженерно-геодезических работ, могут иметь 4, 6, 8, 10, 12 и даже 24 канала слежения. Кроме очевидного преимущества – непрерывного определения координат в режиме реального времени, скорости и траектории движения, многоканальные приемники могут обрабатывать сигналы всех спутников рабочего созвездия, видимых в настоящий момент на небосклоне, а некоторые приемники одновременно и спутников разных орбитальных систем: NAVSTAR (США) и ГЛОНАСС (Россия).
Одночастотные и двухчастотные приемники. Кроме приемников (одно/двухканальных и многоканальных), работающих на одной частоте радиоволн, в практике инженерно-геодезических работ используют и многоканальные двухчастотные приемники, работающие с использованием кодов на двух частотах: 1575,72 МГц и 1227,6 МГц. Приемники такого уровня обеспечивают более точное определение координат точек местности, в связи с возможностью дифференцированного учета для каждого рабочего спутника ионосферных и тропосферных задержек, а также обеспечивают быструю инициализацию (присваивание начальных значений) приемника, что особенно актуально в местах, где могут часто блокироваться сигналы спутников.
Основное преимущество двухчастотных приемников – возможность сократить время наблюдений на пунктах (до 20 раз) с сохранением высокой точности измерений.
По точности определения координат и назначению различают приемники следующих классов:
навигационного класса с точностью определения координат 150 – 200 м;
класса картографии и ГИС с точностью определения координат 1 – 5 м;
геодезического класса с точностью определения координат до 1 см.
Приемники навигационного класса дешевы и компактны (рис. 18). Они призваны решать главным образом навигационные задачи на транспорте, в народном хозяйстве (например, при поиске полезных ископаемых и т. д.) и отдыхе.
Приемники класса точности картографии и ГИС также относительно дешевы и доступны проектно-изыскательским и строительным организациям (рис. 19). Их точность может быть существенно повышена в случае применения базовых станций (см. ниже п. 3.9) и они могут быть использованы при решении большинства инженерно-геодезических задач, включая задачи, решаемые в режиме реального времени (например, съемка плана и продольного профиля существующей автомобильной дороги с движущегося автомобиля).
Приемники геодезического класса точности весьма недешевы, однако даже в автономном режиме работы обеспечивают определение координат точек местности с точностью до 1 – 3 см в кинематическом режиме и до 1 см при статических измерениях, и поэтому применимы для решения практически любых инженерно-геодезических задач.
В качестве примера на рис. 20 представлена обобщенная структурная схема GPS-приемника. Антенна может быть встроена в приемник либо быть в виде модуля, подключаемого к приемнику с помощью коаксиального кабеля. Мощность передатчика, установленного на спутнике, сравнительно невелика (около 10 Вт), и поэтому принимаемый сигнал очень мал. Усиление сигнала осуществляется с помощью СВЧ предусилителя, который, как правило, встроен в корпус антенны. Антенны бывают одночастотные, настроенные на частоту L1, либо двухчастотные для приема частот L1 и L2.

Рис. 20. Обобщенная структурная схема GPS-приемника
Наряду с диаграммами направленности важным показателем антенного устройств спутникового приемника является понятие фазового центра, его положение и стабильность этого положения с течением времени. Фазовый центр антенны является определяемой точкой, поэтому предусмотрена возможность ее центрирования на станции. При этом под фазовым центром понимают ту неподдающуюся геометрическим измерениям точку в антенной системе, от которой отсчитываются все измеряемые до спутников расстояния, а ее положение «привязывается» к центру знака на пункте наблюдения.
Антенны, как правило, выполнены в виде полусферы, что позволяет в идеальном случае обеспечивать одинаковую задержку по фазе для радиоволн, приходящих с разных сторон. В действительности все же наблюдается зависимость величины фазовой задержки от направления на спутник, и поэтому для каждой антенны такую зависимость (диаграмму направленности) определяют в заводских условиях. Для высокоточных геодезических спутниковых приемников уклонения реальной фазовой характеристики антенны от идеальной обычно не превышают 5 – 10 градусов, что соответствует ошибкам в определении расстояний на уровне около 3 – 5 мм. При этом на корпус антенны наносят метку, по которой ее ориентируют на север, что позволяет учитывать заводскую характеристику антенны. Чтобы уменьшить влияние радиосигналов, отраженных от подстилающей поверхности и различных местных предметов, используют экранирующие диски, установленные под антенной.
Для усиления мощности принятого сигнала служит усилитель, который подключен, как и синтезатор частот, к преобразователю частоты. Принимаемые колебания после предварительного усиления подвергаются преобразованиям, вследствие чего понижается частота несущих колебаний до нескольких десятков мегагерц, т. е. применяется супергетеродинный принцип приема. Синтезатор частот работает от высокостабильного опорного кварцевого генератора, входящего в состав приемника. В результате преобразователь частоты понижает частоту несущих колебаний до частоты биений в несколько десятков МГц, которые усиливаются в усилителе промежуточной частоты (УПЧ).
С УПЧ сигналы поступают в измерительный блок и блок поиска и захвата, который осуществляет поиск сигнала на основе кодово-корреляционных методов и отслеживание в течение всего сеанса наблюдений. В измерительном блоке сигналы разделяются на кодовые и гармонические, а также сигналы навигационного сообщения. Полученные из кодовых сигналов значения псевдодальностей используются для грубого определения координат и вектора скорости перемещения подвижного объекта, на котором установлен приемник. В камеральных условиях на стадии «постобработки» производится окончательная обработка фазовых измерений.
Блок процессоров осуществляет управление предварительными вычислениями и работой приемника в автоматическом режиме на основе заложенного в него программного обеспечения. Регистрация отсчетов производится с высокой частотой (как правило, через 0,1 с) с выполнением последующей корректировки, обусловленной изменениями измеряемых дальностей, вызванных быстрыми перемещениями спутников. Полученные данные подвергаются сглаживанию и уплотнению, в результате чего образуются выборки, интервал между которыми находится в пределах от 1 до 60 с и может изменяться по желанию оператора.
Пульт управления и индикации включает в себя буквенно-цифровую клавиатуру и индикаторное табло. На нем по желанию оператора могут отображаться определяемые с помощью приемника величины, а также другая вспомогательная информация. Информация о местоположении определяемой точки отображается на экране дисплея непосредственно в процессе сеанса наблюдений, а клавиатура позволяет оператору вводить необходимую информацию и различного роде команды, связанные с управлением работой приемника.
В процессе работы в приемнике производится предварительная обработка получаемой информации и ее регистрация с помощью тех или иных запоминающих устройств, выполняется самодиагностика правильности функционирования приемника, контролируются источники питания, и выполняется целый ряд других операций. Для этих целей служит встроенная специализированная микроЭВМ, включающим в себя процессоры, таймер, различные запоминающие устройства (ОЗУ и ПЗУ), интерфейсные платы для стыковки с пультом управления и индикации, с внешней регистрирующей аппаратурой и т. п. Управление осуществляется с помощью пульта управления и индикации, согласно вводимой в приемник программы.
Геодезические спутниковые приемники обеспечивают высокую точность измерений, имеют значительный объем внутренней памяти, которая может наращиваться и составлять 100 и более Мб, просты в обращении.
Современная спутниковая аппаратура позволяет выполнять измерения в любую погоду и любое время суток, не боится воздействия пыли, влаги и газов, имеет малые габариты и вес, малочувствительна к ударам. Высокая точность определения координат позволяет с успехом использовать спутниковые методы для решения широкого спектра геодезических задач.
§
По мере накопления опыта использования спутниковых радионавигационных систем были отработаны различные методы определения местоположения (координат) точек земной поверхности (пунктов). Их условная классификация представлена на рис. 21.

Рис. 21. Классификация методов определения положения пунктов
По отношению к используемым системам координат, положение пунктов можно разделить на два класса: абсолютное, относительное.
При определении абсолютного положения имеется в виду получить координаты пунктов в единой, принятой в спутниковой радионавигационной системе, координатной системе и системе времени.
Наблюдения, выполняемые на одном пункте независимо от измерений на других станциях, называются автономными. Автономные наблюдения очень чувствительны ко всем источникам погрешностей, обеспечивают точность определения координат 15 – 30 м и используются для нахождения приближенных координат в точных измерениях.
Под относительным положением определяемого объекта подразумевается определение положения одного объекта в системе координат другого объекта, принимаемого за исходный.
При определении абсолютного положения пункта статическим методом, приемное устройство устанавливается на этот пункт и в течение достаточно продолжительного интервала времени ведутся соответствующие наблюдения.
Определение относительного положения пунктов в статическом режиме предусматривает установку приемного устройства как минимум на один базовый (исходный) пункт с известными координатами с одновременными наблюдениями на определяемом пункте. При статическом позиционировании, как и при дифференциальных измерениях, приемники работают одновременно на двух станциях – базовой с известными координатами и определяемой. После окончания измерений выполняется совместная обработка информации, собранной двумя приемниками. Точность способа зависит от продолжительности измерений, которая выбирается в соответствии с расстоянием между точками. Современные приемники позволяют достичь точности определения плановых координат (5 – 10 мм) 1 – 2 мм/км, высотных – в 2 – 3 раза ниже. Если система координат исходного пункта – абсолютная, то в результате наблюдений получают абсолютные координаты определяемого пункта.
Динамический метод предполагает, что приемник, ведущий наблюдения за спутником, установлен на борту транспортного средства, которое находится в движении, при этом имеется независимая от GPS модель движения объекта.
Кинематический метод отличается от динамического отсутствием внешней модели движения определяемого объекта, то есть положение или траектория движения объекта определяется исключительно по данным навигационных спутников.
Кинематические измерения позволяют получать координаты точек земной поверхности за короткие промежутки времени. При этом вначале статическим способом определяют координаты первой точки, т. е. выполняют привязку подвижной станции к базовой, называемую инициализацией, а затем, не прерывая измерений, передвижной приемник устанавливают поочередно на вторую, третью и т. д. точки. Для контроля измерения завершают на первой точке либо на пункте с известными координатами, где выполняют статические наблюдения. Точность кинематического способа составляет 2 – 3 см в плане и 6 – 8 см по высоте.
Если имеется цифровой радиоканал и данные с базового приемника в процессе измерений можно передавать на подвижную станцию, координаты получают в режиме реального времени, т. е. непосредственно на определяемой точке.
3.9. Организация геодезических работ
с использованием базовых станций «DGPS»
Использование сравнительно недорогих GPS-приемников класса точности определения координат картографии и ГИС, дающих ошибки до нескольких метров, оказывается возможным и для измерений геодезического класса точности (до 1 см), если использовать методику дифференциального (относительного) позиционирования в режиме работы с базовыми станциями, получившими название «Differential GPS» – «DGPS». Технология дифференциального позиционирования основана на том, что ошибки определения абсолютных координат разными приемниками одних и тех же марок в пределах одного локального участка местности практически одинаковы. Тогда, если установить DGPS-приемник (базовую станцию) в точке с точно известными координатами, можно определять разницу между эталонными и GPS-координатами и ретранслировать поправки по радиоканалам на другие (ведомые) GPS-приемники. Базовую DGPS-станцию устанавливают на точке с известными высотой и плановыми координатами (например, на пункте государственной геодезической сети) либо на пункте, специально созданном в любом удобном месте и привязанном традиционными методами наземной геодезии к пунктам государственной геодезической сети.
Сверхточные измерения с использованием приемников относительно невысокой точности сводятся к непрерывному сбору данных в течение некоторого отрезка времени при неподвижном приемнике и точном знании координат некоторой «опорной» точки, в которой установлена DGPS-станция. Современные GPS-приемники геодезического класса и даже класса картографии и ГИС уже позволяют выполнять съемочные работы в режиме «кинематической съемки», т. е. в режиме перемещения реечников от точки к точке, в каждой из которых координаты мгновенно регистрируются геодезистом на магнитные носители простым нажатием кнопки. То же самое можно делать и при выполнении съемки в реальном масштабе времени плана и профиля существующих автомобильных дорог при их реконструкции с движущегося автомобиля при скорости до 30 км/ч.
Высокую точность определения координат точек местности при использовании базовых DGPS-станций можно обеспечить приемниками умеренной точности, находящимися на расстоянии в пределах до 10 км от базовой DGPS-станции. Корректирующий сигнал автоматически устраняет все возможные ошибки системы, независимо от того, связаны ли они с неточностью хода часов, ошибками эфемерид или ионосферными и тропосферными задержками радиосигналов. Именно по этой причине в качестве ведомых могут использоваться не только дорогие двухчастотные, но и относительно дешевые одночастотные приемники (рис. 22).
Работу с базовыми опорными DGPS-станциями организуют двумя способами.
В первом способе с опорной станции по телеметрическим каналам ведомым приемникам передаются сообщения об ошибках, а затем их компьютеры обрабатывают эти сообщения совместно с собственными данными о местоположении, определенном по спутниковым сигналам.

Рис. 22. Схема геодезических измерений
с использованием базовой станции «DGPS»
Во втором способе базовая DGPS-станция работает в режиме «псевдоспутника». Станция передает сигналы той же структуры, что и спутники, т. е. содержащие псевдослучайные коды и информационные сообщения. Ведомые приемники обрабатывают сигналы базовой станции в одном из своих неиспользованных каналов, т. е. получают данные коррекции тем же путем, что и данные об эфемеридах от навигационных спутников орбитального комплекса.
Топографическая съемка с использованием геодезических спутниковых приемников выполняется в три этапа: подготовительные работы, создание геодезического съемочного обоснования, собственно съемка.
В ходе подготовительных работ выбирают места для закрепления точек съемочного обоснования с таким расчетом, чтобы не было помех от расположенных вблизи сооружений, крон высоких деревьев, источников мощного радиоизлучения. Все эти факторы могут существенно снизить качество выполняемых спутниковых измерений. Кроме того, особое внимание уделяется планированию наблюдений, для каких целей используют специальный модуль в программном обеспечении спутникового приемника. Этот модуль позволяет получить характеристику процесса позиционирования на любой момент времени и, таким образом, выбрать наиболее благоприятный период для выполнения измерений.
Определение координат пунктов геодезического съемочного обоснования производится методом статических спутниковых наблюдений. Данный метод является наиболее надежным и точным методом, позволяющим получить разность координат смежных пунктов с миллиметровой точностью. Один из приемников, называемый базовым, устанавливают на штативе над исходной точкой с известными координатами (пункт государственной геодезической сети, геодезической сети сгущения), а второй, называемый мобильным, – поочередно на пункты съемочной сети. При этом должно быть обеспечено условие синхронных измерений базовым и мобильным приемниками.
Длительность времени наблюдений выбирается в зависимости от длин базовых линий, количества одновременно наблюдаемых спутников, класса используемой спутниковой аппаратуры и условий наблюдений. С учетом всех перечисленных факторов время измерения каждой базовой линии может составлять от 15 – 20 мин. до 2,5 – 3 ч. Работа с каждым приемником на станции включает: центрирование приемника над пунктом с помощью нитяного или оптического отвеса, измерение высоты антенны с помощью секционной рейки, включение приемника. При измерении в статическом режиме во время работы не требуется производить каких-либо действий. Приемник автоматически тестируется, отыскивает и захватывает все доступные спутники, производит GPS-измерения и заносит в память всю информацию. По истечении необходимого времени наблюдений мобильный приемник переносят на следующую определяемую точку. После окончания измерений производят обработку полученных результатов, которая включает вычисление длин базовых линий и координат пунктов обоснования в системе координат WGS-84, строгое уравнивание сети по методу наименьших квадратов, трансформирование уравненных координат в государственную или местную (условную) систему координат. Точность определения планового местоположения точек статическим способом достигает (5 – 10 мм) 1 – 2 мм/км, высотного – в 2 – 3 раза ниже.
Топографическая съемка местности выполняется посредством проведения кинематических спутниковых измерений, позволяющих получать координаты и высоты точек за короткие промежутки времени. Для этого базовый приемник на штативе устанавливается на пункте съемочного обоснования, а мобильный – поочередно на снимаемые точки, причем приемник вместе с источником питания располагаются в специальном рюкзаке, а приемная антенна и контроллер, с помощью которого осуществляется управление процессом съемки, крепятся на вехе (рис. 23). Вначале выполняется инициализация – привязка мобильной станции к базовой, для чего измерения на первой точке проводят несколько дольше (20 – 30 с), чем на последующих точках. Установив веху с антенной на точку и задав в контроллере все необходимые параметры (высоту установки антенны на вехе, номер пикета, его признак, например: угол забора, смотровой колодец и т. п.), начинают съемку, контролируя вертикальность вехи по пузырьку круглого уровня.

Рис. 23. Базовый (а) и мобильный (б) приемники
Время наблюдения на точке обычно не превышает 5 – 10 с, после чего измерения останавливают и, не выключая приемника, переходят на следующую точку. В случае, если снимаемая точка располагается в непосредственной близости от строения, высоких деревьев, других объектов, закрывающих видимость на спутники, время измерений должно быть увеличено. Кроме того, измерения на такие точки можно повторить, вернувшись на них еще раз. Завершают съемку участка наблюдениями на первой точке либо на пункте с известными координатами. После завершения съемки производят обработку результатов так же, как и в случае статических измерений. Точность способа кинематических измерений составляет 2 – 3 см в плане и 6 – 8 см по высоте. Результаты измерений могут быть представлены как в цифровом виде, так и в графической форме.
3.10. Комплексное использование спутниковой аппаратуры
и традиционных геодезических средств
Для использования технологий спутниковых координатных определений необходимо обеспечение видимости на момент измерений по линии «спутник – антенна приемного устройства». Во многих случаях практики обеспечить такую видимость не удается. Поэтому актуальным становится комплексное использование для решения геодезических задач спутниковой аппаратуры и традиционных геодезических средств (светодальномеров, теодолитов, нивелиров, электронных тахеометров). Наиболее эффективно использование GPS-аппаратуры с электронными тахеометрами. Это обусловлено следующими причинами.
Электронные тахеометры являются универсальными геодезическими приборами. Они предназначены для измерения углов и расстояний. В результаты измерений тахеометром автоматически вводятся поправки за метеоусловия (причем, отдельные тахеометры сами определяют температуру и давление), за приведение длин линий к плоскости горизонта и др. Тахеометры обеспечивают цифровую индикацию горизонтальных и вертикальных углов, дирекционных углов, наклонных расстояний, горизонтальных проложений, приращений координат и других величин. Время на выполнение комплекса измерений (горизонтальное направление вертикальный угол расстояние вывод результата) составляет несколько секунд. Большинство тахеометров имеют собственную память, встроенный микропроцессор и библиотеку программ для выполнения геодезических работ. Ряд современных тахеометров позволяет выполнять измерения до невидимых точек (например, через листву) с помощью специального отражателя, а также работать с микропризменными наклейками.
Современные тахеометры и GPS-приемники имеют одинаковые форматы записи полевой информации, взаимозаменяемые карты памяти. Возможна также автоматизированная передача полевых измерений в пакет совместной обработки с последующей передачей результатов измерений в базы данных ГИС.
Принципиально возможно использование спутниковой геодезической аппаратуры (СГА) и традиционных геодезических средств по следующим направлениям:
1. Геодезические построения на объекте работ, выполненные СГА, и традиционные не имеют между собой никаких связей.
2. Спутниковые и традиционные геодезические построения связаны между собой. При этом возможно три варианта связей:
развитие сети традиционными методами от пунктов, определенных спутниковыми приемниками;
развитие сети методами GPS-измерений от пунктов, определенных традиционными методами;
ступенчатое развитие сетей, при котором спутниковые и традиционные измерения чередуются между собой.
Традиционными методами определения плановых координат пунктов являются: триангуляция, полигонометрия, трилатерация, засечки. При выборе метода учитываются требуемая точность координатных определений, сроки выполнения работ, характер местности и состояние исходной геодезической основы в районе выполнения работ, прогноз погоды, условия видимости и пр.
Определение координат пунктов с помощью СГА может выполняться следующими методами: лучевым (рис. 24), сетевым (рис. 25), совмещенным (рис. 26).
Оформление рисунков выполнено в следующих условных знаках:
Треугольник – исходный пункт сети с известными координатами в системе, установленной проектом работ.
Квадрат ‑ опорная станция в сети.
Круг ‑ мобильная станция в сети.
При лучевом методе определяемые пункты координируются с одного опорного пункта (рис. 24, а). Рассматриваемый метод часто называют радиальным. Он широко используется для выполнения топографических съемок в кинематическом режиме. Недостаток лучевого метода заключается в отсутствии контроля определения координат. Для организации такого контроля определяемые пункты при развитии геодезической сети лучевым методом координируются не менее, чем с двух опорных пунктов (рис. 24, б).
Укажем на важную особенность координатных определений с помощью спутниковой аппаратуры. Пусть определяемые точки 3, 4 находятся на расстоянии 100 м одна от другой и на удалении ≈ 10 км от опорных пунктов 1, 2 (рис. 24, б). Угол засечки g примем равным 45°. Пренебрегая ошибками центрирования, вычислим среднюю квадратическую ошибку положения определяемых точек по формуле
 , (18)
, (18)
где mS – ошибка измерения расстояния, в статическом режиме для двухчастотной аппаратуры примем mS = 5 мм 1 мм∙ Sкм = 15 мм.
В результате получим mXY = 30 мм. Средняя квадратическая ошибка взаимного положения пунктов 3, 4 будет равна  = 42 мм, что при расстояниях между определяемыми точками 100 м дает относительную ошибку 1:2400. Такая точность существенно ниже той, которая могла бы быть получена при непосредственном измерении линии 3 – 4 как с помощью СГА, так и топографическими светодальномерами.
= 42 мм, что при расстояниях между определяемыми точками 100 м дает относительную ошибку 1:2400. Такая точность существенно ниже той, которая могла бы быть получена при непосредственном измерении линии 3 – 4 как с помощью СГА, так и топографическими светодальномерами.
Сетевой метод спутниковых координатных определений предполагает проведение измерений на каждой линии сети (см. рис. 25). Это, по сути, аналог трилатерационных построений.
При сетевом методе целесообразно использовать несколько одновременно работающих станций. Это позволяет в каждом сеансе наблюдений измерять не только запроектированные линии, но и дополнительные, соединяющие любую пару, участвующих в наблюдениях приемников. По окончании сеанса часть станций остается на месте, а другие устанавливаются на следующих, согласно проекту, пунктах. В очередном сеансе линии между пунктами первой группы измеряются повторно, что позволяет осуществлять контроль их определения. При значительном числе двойных измерений можно выполнять предварительный контроль качества измерений по их разностям.
При использовании сетевого метода контроль качества измерений осуществляется также по невязкам замкнутых построений. В итоге, сетевой метод позволяет за счет избыточных измерений существенно повысить точность и надежность координатных определений.
При совмещенном методе часть пунктов сети определяется сетевым, а часть пунктов лучевым методами (рис. 26).
Рассмотрим теперь схемы геодезических построений, в которых спутниковые и традиционные геодезические построения связаны между собой. В этом случае возможны различные варианты (рис. 27 – 30).
Использование спутниковых приемников и электронных тахеометров весьма эффективно при выполнении топографических или кадастровых съемок. Для этого на объекте работ GPS-методом определяется сеть пунктов (минимум 2 пункта). Тахеометр устанавливается в любом месте, удобном для проведения съемок. Координаты точек стояния тахеометров определяются по координатам GPS-пунктов любой из известных засечек (варианты приведены на рис. 28). Съемка выполняется обычным порядком.
Если с какой-либо точки стояния тахеометра нет видимости на GPS-пункты и соответственно невозможно определить координаты точек стояния, то можно использовать принцип блочной тахеометрии (рис. 31).
В этом случае участок разбивается на блоки, в пределах каждого из которых выполняется съемка с одной установки электронного тахеометра. В программу наблюдений включаются, кроме пикетов, имеющиеся в блоке исходные пункты и связующие точки (1 и 2 на рис. 31).
По связующим точкам осуществляется последующее объединение отдельных блоков в единый блок. Число связующих точек между смежными блоками должно быть не менее двух. Особенностью метода является то, что необязательна видимость между смежными установками тахеометра.
3.11. Решение традиционных геодезических задач
с применением навигационных приемников
Рассмотрим возможные варианты решения традиционных геодезических задач на примере применения спутниковых приемников начального уровня eTrex (Garmin).
Garmin и другие производители навигационной аппаратуры пользователя выпускают значительное количество приемников, различающихся наличием различных функций, интерфейсов, конструктивными особенностями корпуса, размером жидкокристаллического экрана, объемом встроенной памяти и возможностями установки дополнительных карт памяти. Большинство современных навигационных приемников позволяет устанавливать карты местности и на ней следить за перемещением приемника, у более совершенных моделей есть возможность трассировки маршрута и звуковое путеуказание. Список дополнительных функций у вновь создающихся навигационных приемников постоянно пополняется, они уменьшаются в размерах и скорее всего в ближайшем будущем найдут широкое применение в мобильных телефонах, электронных часах и другой мобильной технике. Однако основные приемы решения топографо-геодезических задач не зависят от наличия сервисных функций и принадлежности навигационного приемника к той или иной спутниковой системе. Поэтому спутниковый приемник eTrex, в котором установлен минимальный набор сервисных функций, является хорошим инструментом для изучения основ применения спутниковых приемников при решении ряда традиционных геодезических задач: глазомерная и топографическая съемка, составление абрисов, определение площадей и кадастровая съемка, привязка объектов, трассировка протяженных объектов, вынос проекта в натуру.
§
После очистки памяти приемника приступим к съемке местности. Съемка выполняется перемещением приемника по объекту и фиксацией всех характерных контурных и высотных точек, выполняемой продолжительным нажатием кнопки Ввод или вхождением в пункт основного меню СОХРАНИТЬ. Возникающий при этом диалог ЗАПИСАТЬ ПТ? позволяет просмотреть название и координаты фиксируемого пункта. Перемещаясь между углами поворота снимаемого контура, записываем их в память приемника.
При этом, как и при тахеометрической съемке, обязательно ведение абриса съемки и фиксация на нем номеров точек. На открытом пространстве такая методика позволяет довольно быстро выполнить грубую съемку участка с приемлемой точностью, однако в городских условиях, в лесу, в условиях закрытого горизонта точность резко падает, причем достоверность координат меняется во времени по мере изменения видимого созвездия спутников. В более совершенных моделях навигационных приемников есть возможность накопления информации о снимаемой точке, т. е. переместившись в пункт, координаты которого необходимо определить, – геодезист включает режим сбора и осреднения информации. Приемник вычисляет весовое среднее из многократного определения координат за время стояния в определяемом пункте. Чем дольше накапливаются данные, тем больше спутников в различных комбинациях обработает приемник, тем достовернее будет получен результат.
Кроме съемки контуров (лесов, лугов, полей, дорог, тропинок, гидрографии и др.) следует выполнить привязку не менее чем к двум пунктам государственной геодезической сети, расположенным, по возможности, в местности с открытым горизонтом. Привязку лучше проводить трехкратно, в разное время суток и если приемник позволяет – в режиме накопления данных по 10 – 30 минут (в зависимости от открытости горизонта). Для приемника eTrex достаточно выполнить многократную (утром, днем и вечером) привязку к опорной геодезической сети, лучше в течение двух-трех дней, с тем, чтобы в дальнейшем усреднить полученные результаты. Для вычисления веса каждого измерения следует записать в журнал погрешность m определения координат (показана в левом верхнем углу на первой странице экрана – с созвездием спутников).
За вес каждого измерения можно принять величину обратную погрешности m определения координат. Тогда при трехкратном определении положения пункта Государственной геодезической сети (ГГС) получим:
 ;
;
 ;
;
 ;
;
 .
.
Следует помнить, что высота пункта определяется с меньшей точностью, чем его плановое положение. В этом легко убедиться, наблюдая некоторое время за изменением текущих значений высоты одного и того же пункта. Поэтому полученная высота носит скорее справочный характер и не может быть использована для съемки рельефа.
В камеральных условиях весь список полученных координат точек переписывается в журнал или персональный компьютер (в формате Exel) или копируется из внутренней памяти приемника или с внешней карты на жесткий диск компьютера через имеющийся у приемника интерфейс. Перед очисткой памяти приемника необходимо провести сверку переписанных данных «во вторую руку».
Полученные координаты можно наносить на планшет (как это делалось при камеральной обработке тахеометрической съемки) и, сверяясь с абрисом, вычерчивать план объекта. Однако часто требуется составить план или выполнить досъемку участка в местной или государственной системе координат. В этом случае необходимо определить параметры трансформации прямоугольной системы координат RT 90, в которой была выполнена съемка приемником, к принятой на объекте системе прямоугольных координат. В случае с государственной системой координат или другими общепринятыми и широко применяющимися системами координат существуют специальные программы – конверторы, учитывающие большое количество поправок, необходимых при перевычислении.
3.12. Преимущества и недостатки спутниковых систем
и перспективы их использования
Основными достоинствами спутникового позиционирования являются всепогодность, глобальность, оперативность, точность и эффективность. Эти качества зависят от баллистического построения системы, высокой стабильности бортовых эталонов частоты, выбора сигнала и способов его обработки, а также от способов устранения и компенсации погрешностей. Параметры систем и их отдельных элементов, а также математическое обеспечение выбираются так, чтобы ошибка навигационных определений по координатам была не более 10 м, а по скорости до 0,05 м/с.
В качестве недостатка спутниковых систем можно отметить возникновение при их работе ошибки, вызываемой «многолучевостью», которая обусловлена многократными переотражениями сигнала со спутника от окружающих предметов и поверхностей до того, как он попадает в антенну приемника, а также дифракцией на мелких предметах, соизмеримых с длиной волны, находящихся на пути радиолуча. При этом радиолуч проходит по другому пути, что вызывает изменение его амплитуды и фазы. В приемной антенне происходит интерференция прямого и отраженного лучей и, следовательно, изменяются амплитуда и фаза результирующего поля, что, в свою очередь, ведет к искажению измеряемой дальности. Ошибки, вызванные многолучевостью, все время меняются, что вызвано движением спутников. Искажения в значительной степени можно компенсировать, если наблюдения длятся дольше периода изменения погрешностей, а накопленные измерения обрабатываются совместно.
Для уменьшения влияния этого эффекта в спутниковых приемниках применяются специальные антенны и усовершенствованная техника обработки сигналов.
Одним из факторов, ухудшающих результаты спутниковых измерений, могут также стать помехи от близко расположенных мощных источников радиоизлучений: локаторов, теле- и радиопередающих станций и т. п.
Важнейшей характеристикой качества спутниковых измерений является геометрический фактор, характеризующий потери точности из-за геометрии засечки, т. е. расположения наблюдаемых спутников. Установлено, что точность определений тем выше, чем больше объем треугольной пирамиды, в вершинах которой располагаются спутники. Поскольку параметры орбит спутников точно известны, можно заранее определить время, когда геометрия спутников будет наилучшей для измерений. Поэтому спутниковым наблюдениям всегда предшествует очень важный этап планирования работ. В измерения включают все видимые в данный момент спутники, максимальное число которых может достигать 12 – 13; это позволяет повысить точность определений на 15 – 20 %.
В настоящее время спутниковое геодезическое оборудование применяется для решения широкого круга геодезических задач, включая в первую очередь спутниковые координатные определения при создании геодезических сетей.
Как известно, государственная плановая геодезическая сеть состоит примерно из 350 тыс. геодезических пунктов, включая пункты триангуляции и полигонометрии 1 и 2 классов, которых около 164 тыс. Ошибки координат пунктов увеличиваются к востоку и северу относительно исходного пункта и достигают 10 – 15 м.
Существуют предложения не только восстанавливать и поддерживать существующую сеть, но и создать спутниковую геодезическую сеть 2 класса. Точность определения приращений координат при длительности сеанса наблюдений 1 – 2 ч двухчастотными приемниками характеризуется величиной порядка 1 × 10-6 от расстояния между пунктами. При этом из экономических соображений сеть второго класса целесообразно создавать на отдельные регионы страны. Современные методы уравнивания такой сети, в которой используются результаты как прежних традиционных измерений, так и полученные по спутниковым наблюдениям, позволяют не искажать спутниковые данные. В настоящее время разрабатываются основные положения о государственной геодезической сети, которые базируются на использовании спутниковых наблюдений.
Применение спутниковых приемников для привязки центров фотографирования позволило в несколько раз снизить общую стоимость работ за счет уменьшения объемов полевых работ, связанных с привязкой аэрофотоснимков.
Широкое применение получили спутниковые измерения в режиме RTK, которые используются для плановой и высотной съемки открытых территорий, создания локальных сетей сгущения на небольших удаленных объектах, выносе в натуру проектов. Режим кинематики обычно используется при топографической съемке.
С созданием спутникового геодезического оборудования значительно расширились возможности изучения вертикальных движений земной коры на больших территориях, вызванных движением материковых плит, наблюдений за деформациями земной поверхности, вызываемыми осадками (снегом, дождем, изменением барометрического давления и т. д.), а также изучения деформаций земной поверхности, вызываемых техногенными факторами.
Благодаря достоинствам спутниковых технологий Федеральной службой геодезии и картографии России принята концепция перехода топографо-геодезического производства на автономные методы спутниковых координатных определений. Согласно этой концепции дальнейшее развитие государственной геодезической сети будет выполняться исключительно спутниковыми методами.
Одним из важнейших направлений совершенствования и развития спутниковой радионавигации является совместное использование сигналов ГЛОНАСС и GPS, а в будущем – Galileo. Основные цели этого процесса – повышение точности и надежности (доступности, непрерывности обслуживания и целостности) навигационных определений.
Концепция развития главной геодезической основы в соответствии с Основными положениями о государственной геодезической сети предусматривает на ближайшую перспективу развитие высокоточных геодезических сетей, ориентированное на широкое использование спутниковых технологий.
Современные спутниковые методы, основанные на применении спутниковых навигационных систем GPS и ГЛОНАСС, обладают рядом преимуществ по сравнению с традиционными методами геодезических измерений. К основным из них относятся следующие:
возможность оперативной и точной передачи координат на большие расстояния;
отсутствие необходимости обеспечения взаимной видимости между смежными опорными пунктами. Это позволяет располагать пункты в местах, благоприятных для их долговременной сохранности и удобных для последующего использования; при этом отпадает необходимость сооружения дорогостоящих наружных геодезических знаков;
снижение требований к плотности исходной геодезической основы, позволяющее резко сократить число опорных пунктов;
простота организации и высокий уровень автоматизации работ, возможность выполнения работ в любое время суток и при любых погодных условиях;
возможность объединения на базе единой технологии плановой и высотной геодезических основ, совмещения пунктов носителей плановых координат и высот и связи существующих плановых и высотных сетей.
Согласно новой концепции и программе перехода топографо-геодезического производства на автономные методы спутниковых координатных определений предусматривается построение сетей высшего класса точности, связанных между собой по принципу перехода «от общего к частному». К таким геодезическим сетям относятся:
1. Фундаментальная астрономо-геодезическая сеть (ФАГС), являющаяся высшим звеном координатного обеспечения. ФАГС реализует общеземную геоцентрическую систему координат ПЗ-90 при решении задач координатно-временного обеспечения территории страны.
ФАГС представляет собой систему равномерно распределенных по территории страны пунктов, удаленных друг от друга на 800 – 1000 км. Число таких пунктов составит 50 – 70, из которых 10 – 15 пунктов будут постоянно действующими, а остальные – переопределяться группами через определенные промежутки времени в зависимости от динамической активности региона.
Пространственное положение пунктов ФАГС определяется в общеземной системе координат с максимально возможной точностью, которая может быть обеспечена использованием всего комплекса существующих методов космических измерений (радиоинтерферометрических, лазерных др.). При этом средние квадратические погрешности взаимного положения пунктов не должны превышать 2 см в плане и 3 см по высоте.
2. Высокоточная геодезическая сеть (ВГС), которая представляет собой однородное по точности пространственное геодезическое построение, состоящее из системы пунктов, расположенных на расстоянии 150 – 300 км друг от друга. Основными функциями ВГС являются распространение на всю территорию страны общеземной геоцентрической системы координат, обеспечение ее связи с референцной системой геодезических координат СК-95, объединение плановой и высотной геодезических основ. Положение пунктов ВГС определяется относительными методами космической геодезии со средними квадратическими погрешностями не более 10 – 18 мм в плане и 15 – 25 мм по высоте.
3. Спутниковая геодезическая сеть I класса (СГС-1) состоит из системы легкодоступных пунктов, удаленных друг от друга на 25 – 35 км; в экономически развитых районах плотность пунктов может быть повышена. Такая плотность пунктов сети должна обеспечивать оптимальные условия для использования методов спутниковой системы позиционирования.
Положение пунктов СГС-1 определяется относительными методами космической геодезии со средними квадратическими погрешностями не более 10 – 12 мм в плане и 15 – 18 мм по высоте; в динамически активных районах точность определения координат пунктов должна быть повышена до 5 – 6 мм в плане и 10 – 12 мм по высоте.
Указанные выше классы сетей строго связаны между собой: ФАГС является основой для развития ВГС, а ВГС – для СГС-1. При построении ФАГС, ВГС и СГС-1 предусматривается привязка к высшему классу спутниковой сети пунктов существующей государственной геодезической сети, т. е. последняя станет играть роль сети сгущения.
Следует отметить, что наряду с очевидными преимуществами спутниковые методы определения координат имеют ряд недостатков. Поэтому их применение не всегда позволяет обеспечить оптимальное решение геодезических задач. Следовательно, наряду со спутниковыми методами необходимо использовать и традиционные технологии геодезических работ.





