
- Координаты центра тяжести тела
- Метод дополнения
- Определение центра тяжести тела
- Площадь кругового сектора
- Площадь треугольника
- Примеры задач с решением
- Пространственная стержневая система
- Прямолинейный отрезок
- Способы определения координат центра тяжести тела
- Теоретическое понятие центра тяжести тела.
- Центр масс
- Центр параллельных сил
- Центр тяжести дуги окружности
- Центр тяжести кругового сегмента
- Центр тяжести сектора
- Центр тяжести трапеции
- Центры тяжести некоторых однородных тел
- Экспериментальные способы
Координаты центра тяжести тела
В трехмерном пространстве координаты центра тяжести для твердого тела нахояд как:
[left{ begin{array}{c}
x_c=frac{sumlimits_i{Delta m_ix_i}}{m};; \
y_c=frac{sumlimits_i{Delta m_iy_i}}{m};; \
z_c=frac{sumlimits_i{Delta m_iz_i}}{m} end{array}
right.left(1right),]
где $m$ – масса тела.$;;x_i$ – координата на оси X элементарной массы $Delta m_i$; $y_i$ – координата на оси Y элементарной массы $Delta m_i$; ; $z_i$ – координата на оси Z элементарной массы $Delta m_i$.
В векторной форме записи система уравнений (1) представляется как:
[{overline{r}}_c=frac{1}{m}sumlimits_i{m_i{overline{r}}_ileft(2right),}]
${overline{r}}_c$ – радиус – вектор, определяющий положение центра тяжести; ${overline{r}}_i$ – радиус-векторы, которые определяют положения элементарных масс.
Метод дополнения
Способ, о котором говорится далее, является некоторым случаем способа разбиения. Он может применяться к телам, которые имеют вырезы, полости, причем без учета выреза, или вырезанной части тела положение центра тяжести тела известно. Рассмотрим пример применения такого метода.
Пример. Определить положение центра тяжести круглой пластины радиусом R, имеет круговое отверстие радиуса r (рис. 1.65). Расстояние C1C2 = a.
Решение.
Как видно из рисунка, центр тяжести пластины находится на оси симметрии пластины x, то есть на прямой, проходящей через точки C1 и C2. Таким образом, для определения положения центра тяжести этой пластины необходимо вычислить только одну координату xC, поскольку вторая координата yC равна нулю. Покажем оси координат x, y. Примем, что пластина состоит из двух тел — с полного круга (без учета выреза) и тела,
образовано вырезом. В принятой системе координаты x для указанных тел будут равны: x1 = 0; x2 = C1C2 = a. Площади тел равны: 

заданной пластины используем первое уравнение выражения.
Подставив значения всех известных величин в это уравнение, получим
Таким образом, значение координаты xC отрицательное, а потому, поскольку вторая координата 0 yC = 0, то центр тяжести пластины C размещен на оси x слева от точки C1.
Определение центра тяжести тела
Центр тяжести – это точка, относительно которой суммарный момент сил тяжести равен нулю при любом положении тела.
От положения центра тяжести зависит устойчивость всех конструкций.
Площадь кругового сектора
Центр тяжести площади кругового сектора с радиусом 



Рис. 94
Используя формулу для центра тяжести дуги окружности, получим
или
Для площади полукруга 


Площадь треугольника
Для определения центра тяжести площади треугольника разобьем его прямыми линиями, параллельными одной из его сторон 







Рис. 92
Примеры задач с решением
Задание: Каковы координаты центра тяжести системы из трех точечных масс, расположенных в вершинах и одной в центре равностороннего треугольника, со стороной равной $a (м)$ (рис.1)?
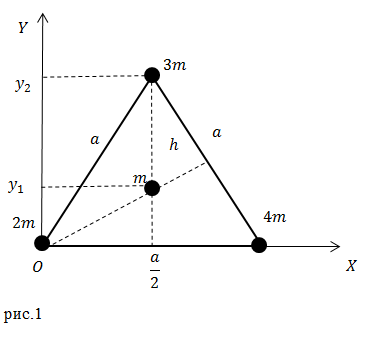
Решение: Определение для координат $x_c и y_c$ центра тяжести в нашем случае запишем в виде:
[x_c=frac{m_1x_1 m_2x_2 m_3x_3 m_4x_4}{m_1 m_2 m_3 m_4}(1.1);;]
[y_c=frac{m_1y_1 m_2y_2 m_3y_3 m_4y_4}{m_1 m_2 m_3 m_4}(1.2).]
Из рис.1 мы видим, что соответствующие абсциссы точек равны:
[left{ begin{array}{c}
m_1=2m, x_1=0;; \
{rm }m_2=3m, x_2=frac{a}{2};; \
m_3=m, x_3=frac{a}{2};; \
m_4=4m, x_4=a. end{array}
right.left(1.3right).]
Тогда абсцисса центра тяжести получается равной:
[x_c=frac{2mcdot 0 3mcdot frac{a}{2} mcdot frac{a}{2} 4mcdot a}{2m 3m m 4m}=frac{6ma}{10m}=0,6a (м);]
Найдем ординаты точек.
[ begin{array}{c}
m_1=2m, y_1=0;; \
{rm }m_2=3m, y_2=frac{asqrt{3}}{2};; \
m_3=m, y_3=frac{asqrt{3}}{6};; \
m_4=4m, y_4=0. end{array}
left(1.4right).]
Для того чтобы найти ординату $y_2$ найдем, высоту в равностороннем треугольнике:
[h=sqrt{a^2-frac{a^2}{4}}=frac{asqrt{3}}{2}=y_2left(1.5right).]
Ординату $y_3$ найдем, учитывая, что медианы в равностороннем треугольнике точкой пересечения делятся в отношении 2:1 от вершины, имеем:
[y_3=hcdot frac{1}{3}=frac{asqrt{3}}{6} left(1.6right).]
Вычислим ординату центра тяжести:
[y_c=frac{2mcdot 0 3mcdot frac{asqrt{3}}{2} mcdot frac{asqrt{3}}{6} 4mcdot 0}{2m 3m m 4m}=frac{10mfrac{asqrt{3}}{6}}{10m}=frac{asqrt{3} }{6}(м).]
Ответ: $x_c=0,6a {rm }{rm м}$; $y_c=frac{asqrt{3} }{6}$ м
Задание: Каковы координаты центра тяжести системы из четырех элементарных масс, расположенных в вершинах куба со стороной равной $a$ (рис.2)?
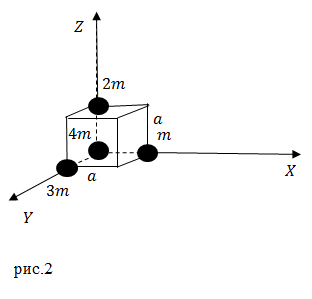
Решение: Координату $x_c$ центра тяжести найдем как:
[x_c=frac{m_1x_1 m_2x_2 m_3x_3 m_4x_4}{m_1 m_2 m_3 m_4}=frac{mcdot a 2mcdot 0 3mcdot 0 4mcdot 0}{m 2m 3m 4m}=frac{am}{10m}=0,1 aleft(мright).]
Ординату центра тяжести вычислим как:
[y_c=frac{m_1y_1 m_2y_2 m_3y_3 m_4y_4}{m_1 m_2 m_3 m_4}=frac{mcdot 0 2mcdot 0 3mcdot a 4mcdot 0}{m 2m 3m 4m}=frac{acdot 3m}{10m}=0,3a left(мright).]
Для координаты $z_c$ получаем:
[z_c=frac{m_1z_1 m_2z_2 m_3z_3 m_4z_4}{m_1 m_2 m_3 m_4}=frac{mcdot 0 2mcdot a 3mcdot 0 4mcdot 0}{m 2m 3m 4m}=frac{acdot 2m}{10m}=0,2a left(мright).]
Ответ: ($x_{c, }y_c, z_c$)=($ 0,1 a$, $0,3a$, $0,2a$)(м)
Пространственная стержневая система
Постановка Задачи. Найти координаты центра тяжести пространственной фигуры, состоящей из N однородных стержней.
План решения:
1. Разбиваем фигуру на отдельные стержни.
2. Выбираем систему координат. Вычисляем длины и координаты 
4. Определяем координаты центра тяжести тела по формулам
Прямолинейный отрезок
Центр тяжести прямолинейного однородного отрезка располагается на его середине, а неоднородного— на самом отрезке и не может находиться вне отрезка.
Способы определения координат центра тяжести тела
Существует несколько способов определения координат центра тяжести тел. среди них различают: метод симметрии, метод разбиения и дополнения, экспериментальные способы.
Рассмотрим последовательно эти способы.
Теоретическое понятие центра тяжести тела.
ТЕОРЕТИЧЕСКОЕ ПОНЯТИЕ ЦЕНТРА ТЯЖЕСТИ ТЕЛА.
Рассмотрим сложение параллельных сил. Представим, что к трём точкам А1, А2 и А3 твердого тела приложены параллельные силы , и , образующие пространственную систему. Равнодействующая двух параллельных сил равна по модулю сумме их модулей, а линия действия делит расстояние между точками приложения слагаемых сил на отрезки, обратно пропорциональные силам (рис. 1).
Точка С, через которую проходит линия действия равнодействующей системы параллельных сил, называется центром параллельных сил.
Формулы координат центра параллельных сил имеют вид:
; ; . (1)
При рассмотрении движения тел, особенно таких, как самолеты, ракеты, космические корабли, важное значение имеет понятие центра тяжести. Для введения понятия центра тяжести разобьем мысленно рассматриваемое тело на достаточно большое число малых по сравнению с телом или элементарных его частей произвольной формы. Силу тяжести элементарной частицы тела с индексом i от действия на нее Земли обозначим через ΔРi;, а силу тяжести всего тела – через Р. Силы тяжести элементарных частиц тела направлены приближенно к центру Земли, т. е. образуют систему сходящихся сил. Если размеры рассматриваемого тела малы по сравнению с размерами земного шара, то силы тяжести элементарных частиц тела можно считать системой параллельных сил, направленных в одну сторону.
Центром тяжести тела называют центр системы параллельных сил, которую приближенно образуют силы тяжести его элементарных частиц.
Радиус-вектор центра тяжести тела вычисляем как радиус-вектор центра параллельных сил (рис. 2) по формуле
(2)
где – радиус-вектор точки приложения силы тяжести элементарной части тела, принятой за точку; – сила тяжести элементарной частицы; – сила тяжести всего тела; п – число частей, на которое мысленно разбито все тело. Центр тяжести является точкой приложения равнодействующей силы тяжести, если силы тяжести отдельных его частей считать системой параллельных сил.
Если в (2) перейти к пределу, увеличивая число элементарных частей п до бесконечности, то после замены ; дифференциалом dP, а суммы – интегралом получим:
(3)
где – радиус-вектор элементарной части тела, принятой за точку. В проекциях на оси координат из (2) и (3) получаем:
где xc, yc, zc – координаты центра тяжести; xi, yi, zi — координаты точки приложения силы тяжести .
Используя понятие центра тяжести тела, введем понятие его центра масс. Силы тяжести элементарных частей тела и всего тела можно выразить через их массы Δmi и М и ускорение силы тяжести g с помощью формул
Подставляя эти значения сил тяжести в (2) и (3) после сокращения на g, которое принимаем одинаковым для всех частей тела, имеем
(4)
и соответственно
(5)
По формулам (4) и (5) определяют радиус-вектор центра масс тела. Центр масс обычно определяют независимо от центра тяжести как геометрическую точку, радиус-вектор которой вычисляется по формулам (4) или (5). В проекциях на оси координат из (4) и (5) получаем:
где хс, уc, zc – координаты центра масс тела.
Для однородного тела силу тяжести элементарной частицы тела и ее массу можно вычислить по формулам
где – объем элементарной частицы тела; и – соответственно удельный вес и плотность тела. Сила тяжести и масса всего тела
где – объем тела. Подставляя эти значения в (4) и (5), после сокращения на и соответственно получим формулы
и
по которым определяют центр тяжести объема тела.
Если тело имеет форму поверхности, т. е. один из размеров мал по сравнению с двумя другими, как, например, у тонкого листа железа, то имеем
где – удельный вес; – площадь элементарной частицы поверхности; S – площадь всей поверхности. После сокращения на для однородной поверхности получим следующие формулы для определения центра тяжести её площади:
и
Для однородных тел типа проволоки, у которых два размера малы по сравнению с третьим, можно определить радиус-вектор центра тяжести длины линии по формулам
и
где – длина элемента линии; l – общая длина линии, центр тяжести которой определяется.
При решении задачи нахождения центра тяжести плоской фигуры используется понятие статического момента площади относительно оси. Это алгебраическая сумма произведений площадей частей плоской фигуры на расстояние их центров тяжести до оси: и . Тогда, если А – площадь всей плоской фигуры,
; .
МЕТОДЫ ОПРЕДЕЛЕНИЯ ЦЕНТРОВ ТЯЖЕСТИ (ЦЕНТРОВ МАСС)
1. Метод симметрии. При определении центров тяжести широко используется симметрия тел. Для однородного тела, имеющего плоскость симметрии, центр тяжести находится в плоскости симметрии Аналогично для однородного тела, имеющего ось или центр симметрии, центр масс находится соответственно на оси симметрии или в центре симметрии.
Примеры:
- дуга (рис. 3, а.)
- треугольник – центр пересечения медиан (рис. 3, б.)
- круговой сектор (рис. 3, в.)
- параболический треугольник (рис. 3, г)
- конус (рис. 3, д.)
2. Метод разбиения на части (метод группировки). Некоторые тела сложной формы можно разбить на части, центры тяжести которых известны или предварительно могут быть определены. В таких случаях центры тяжести сложных тел вычисляются по общим формулам, определяющим центр тяжести, только вместо элементарных частиц тела берутся его конечные части, на которые оно разбито. Покажем это на частном примере плоской фигуры, изображенной на рис. 4. Плоскую фигуру можно разбить на три части, центры тяжести которых С1, С2и С3 известны. Они находятся на пересечении диагоналей прямоугольников. Их радиусы-векторы обозначим и площади Общая площадь сложной фигуры будет
Используя определение центра тяжести и производя группировку слагаемых под знаком суммы по частям фигуры, на которые она разбита, получим.
Радиусы-векторы центров тяжести частей тела выразятся в такой форме:
или
Используя эти формулы для радиуса-вектора всей фигуры, имеем
Полученная формула имеет ту же структуру, что и формула, определяющая радиус-вектор центра тяжести тела при разбиении его на элементарные частицы, только в нее входят величины для конечных частей тела.
3. Метод отрицательных масс. Видоизменением метода разбиения на части является метод отрицательных масс. Проиллюстрируем его тоже на примере плоской фигуры (рис. 5). Для определения центра тяжести этой фигуры ее можно разбить на три части. Можно поступить по-другому. Для этого дополним нашу фигуру до прямоугольника и примем, что этот прямоугольник с площадью S1 и центром масс С1 полностью заполнен массой (имеет положительную площадь). На той части фигуры, которую добавили, следует распределить отрицательную массу (отрицательную площадь) той же плотности. Площадь этой фигуры с отрицательной массой обозначим S2, а ее центр масс – С2. Применяя метод разбиения на части, радиус-вектор заданной фигуры определим по формуле
В отличие от обычного метода разбиения на части в данной формуле массы и, следовательно, площади входят со знаком минус. Метод отрицательных масс особенно удобен при вычислении положения центров тяжести тел, имеющих отверстия.
4. Способ подвешивания. Данный способ рассматривается ниже.
Центр масс
Центр масс – это некоторое положение, определяемое относительно объекта или системы объектов и это среднее положение всех частей системы, взвешенное в соответствии с их массами.
Центр параллельных сил
Если на тело действует система параллельных сил 



 центром параллельных сил (рис.9.1).
центром параллельных сил (рис.9.1).
Координаты центра параллельных сил определяются по зависимостям:
где 

Центр параллельных сил имеет ту особенность, что через него обязательно будет проходить линия действия равнодействующей при вращении линий действия всех сил системы вокруг точек их приложения на один и тот же угол в одну и ту же сторону. Модули сил при вращении не должны меняться.
Центр тяжести дуги окружности
Рассмотрим дугу AB окружности радиусом R, в которой центральный угол OAB равен 2α (радиан) (рис. 1.67). Покажем оси координат x, y начало которых разместим в точке O. Вследствие того, что дуга имеет ось симметрии Ox, то центр ее тяжести будет расположен именно на этой оси (yC = 0). Остается только вычислить координату xC.
Используем для вычисления этой координаты первое уравнение выражения, а именно
Определим составляющие, которые необходимо подставить в это уравнение. Для этого выделим на дуге AB элемент M M1 длиной dl, равной:
dl = R · dφ.
Если φ — угол, определяющий положение элемента M M1 на дуге AB, то координата x элемента M M1 будет равна:
x = Rcosφ.
Общая длина дуги AB равна:
L = 2α · R.
Подставим эти значения в первое уравнение выражения. При этом считается, что интеграл в числителе данного выражения должен быть определенным по всей длине дуги. Будем иметь:
Таким образом, координата xC будет равняться
xC = 
Центр тяжести кругового сегмента
Центр тяжести кругового сегмента лежит на оси симметрии сегмента и имеет координаты:
где 

Центр тяжести сектора
Рассмотрим круговой сектор OAB радиуса R, центральный угол которого равен 2α (радиан) (рис. 1.69). Центр тяжести сектора, вполне очевидно, лежит на оси его симметрии, то есть на биссектрисе угла AOB.
Будем рассматривать каждый сектор как треугольник с основанием R · ∆φ и высотой R. Центр тяжести каждого треугольника расположен на расстоянии  A´B´. Итак, если 0 ∆φ → 0, то центры тяжести образуют дугу AB, тогда необходимо найти центр тяжести дуги A´B´. Используем формулу, по которой определяется центр тяжести дуги окружности радиусом r:
A´B´. Итак, если 0 ∆φ → 0, то центры тяжести образуют дугу AB, тогда необходимо найти центр тяжести дуги A´B´. Используем формулу, по которой определяется центр тяжести дуги окружности радиусом r:
Тогда учитывая, что
Будем иметь
Услуги по теоретической механике:
- Заказать теоретическую механику
- Помощь по теоретической механике
- Заказать контрольную работу по теоретической механике
Учебные лекции:
- Статика
- Система сходящихся сил
- Момент силы
- Пара сил
- Произвольная система сил
- Плоская произвольная система сил
- Трение
- Расчет ферм
- Расчет усилий в стержнях фермы
- Пространственная система сил
- Произвольная пространственная система сил
- Плоская система сходящихся сил
- Пространственная система сходящихся сил
- Равновесие тела под действием пространственной системы сил
- Естественный способ задания движения точки
- Центр параллельных сил
- Параллельные силы
- Система произвольно расположенных сил
- Сосредоточенные силы и распределенные нагрузки
- Кинематика
- Кинематика твердого тела
- Движения твердого тела
- Динамика материальной точки
- Динамика механической системы
- Динамика плоского движения твердого тела
- Динамика относительного движения материальной точки
- Динамика твердого тела
- Кинематика простейших движений твердого тела
- Общее уравнение динамики
- Работа и мощность силы
- Обратная задача динамики
- Поступательное и вращательное движение твердого тела
- Плоскопараллельное (плоское) движение твёрдого тела
- Сферическое движение твёрдого тела
- Движение свободного твердого тела
- Сложное движение твердого тела
- Сложное движение точки
- Плоское движение тела
- Статика твердого тела
- Равновесие составной конструкции
- Равновесие с учетом сил трения
- Колебания материальной точки
- Относительное движение материальной точки
- Статические инварианты
- Дифференциальные уравнения движения точки под действием центральной силы и их анализ
- Динамика системы материальных точек
- Общие теоремы динамики
- Теорема об изменении кинетической энергии
- Теорема о конечном перемещении плоской фигуры
- Потенциальное силовое поле
- Метод кинетостатики
- Вращения твердого тела вокруг неподвижной точки
Центр тяжести трапеции
Центр тяжести трапеции (рис.9.7) с основаниями 





Наиболее распространенный способ определения положения центра тяжести однородного тела сложной формы заключается в том, что его разбивают на такие части, положение центров тяжести которых известно, или может быть легко определено.
Например, однородную плоскую фигуру (рис.9.8) разбивают на три части 1,2 и 3, положения центров тяжести которых, 



Этим способом удобно пользоваться и при определении положения центра тяжести плоской фигуры, из которой вырезана некоторая часть (рис.9.9).
В этом случае площадь плоской фигуры можно записать в виде разницы площадей сплошной фигуры 1 (площадь положительная) и вырезанной части 2 (площадь отрицательная), то есть 
Координаты центра тяжести фигуры равны:
где 

Первый из этих методов имеет название “метод разбиения”, второй – “метод дополнения”, или “метод отрицательных масс”. В общем случае формулы для определения центра тяжести плоской фигуры имеют вид:
где 
Центры тяжести некоторых однородных тел
Определим далее координаты центров тяжести некоторых простых однородных тел.
Экспериментальные способы
Эти способы нашли широкое применение при отыскании положения центра тяжести тел сложных форм и конфигураций, для которых другие способы почти непригодны вследствие громоздкости и сложности. К таким телам, в первую очередь, следует отнести комбайны, тракторы, сложные сельскохозяйственные машины и орудия.
При применении метода подвешивания тело на тросе подвешивают за различные его точки. Направление троса, будет давать каждый раз направление силы веса тела. Тогда точка пересечения этих направлений и дает положение центра тяжести тела.
Использование второго метода — взвешивание требует измерения веса всего тела, а также отдельных его частей. Рассмотрим пример применения этого метода.
Пример.
Определим продольную координату центра тяжести трактора, у которого продольная база составляет l (рис. 1.66).
Решение.
Сначала поставим на платформу весов задние колеса трактора, как это показано на рисунке. Итак, определяем силу давления задних колес на платформу, или реакцию 

Q = RA RB.
Теперь составим алгебраическую сумму моментов всех сил относительно точки A. Она равна
Откуда определяем продольную координату центра тяжести:
xC = 
Для определения поперечной координаты центра тяжести трактора необходимо знать реакции левых колес (переднего и заднего) и правых, а также поперечную базу трактора. Дальше аналогичным выражением определяется эти координаты центра тяжести.





