
1. Динамические свойства электропривода с линейной механической характеристикой
Для анализа свойствэлектропривода с линейной механической характеристикой как объектаавтоматического управления найдем передаточную функцию системы по управляющемувоздействию:
.
Из рис. 7.1 можно записать:
или
или
или
.
Отсюда

(7.4)
где
(7.5) – электромеханическая
постоянная времени.
Передаточная функция по возмущающему воздействию — моменту статической нагрузки МС, имеет вид:
Из рис. 7.1 получаем:
или
или
, отсюда
(7.5)
Корни этого уравнения:
где
Значение m определяет колебательность разомкнутой электромеханической системы.
Если m > 4, то p1= —α1; p2 = —α2.
Поэтому в этом случае:
; ; (7.6)
Следовательно, при m > 4 рассматриваемыйэлектропривод может быть представлен в виде последовательного соединенияинерционных звеньев с постоянными времени Т1 и Т2.
При m = 4 характеристическое уравнение системы имеет два равныхотрицательных корня . В этом случае:
(7.7)
где
При m и электроприводпредставляет собой колебательное звено с коэффициентом затухания ξ меньшим или равным 1, уменьшающимся по мере уменьшения m.
В этом случаеможно записать:
(7.8)
; ;.
Анализ частотных характеристик двигателей мощностью выше 10кВт показал,что передаточную функцию по управляющему воздействию можно представить в виде:
(7.9)
т.е. заменить колебательное звено двумя апериодическими с постоянной .
Для многихэлектроприводов малой мощности m>4, при этом можнопренебречь электромагнитной инерцией, положив Тэ»0,тогда структурная схема асинхронного электропривода с линеаризованноймеханической характеристикой будет иметь вид (рис. 7.3):
Рис. 7.3. Структурная
схема асинхронного электропривода с линеаризованной механической
характеристикой и .
Из рис. 7.3 после элементарных преобразований:
;;;;;
получаем:
(7.10.)
Полученноеуравнение позволяет структурную схему асинхронной машины с линеаризованноймеханической характеристикой представить в виде (рис. 7.4):
Рис. 7.4. Преобразованная структурная схема асинхронной машины с линеаризованной
механической характеристикой.
Из преобразованной структурной схемы видно, что при Тэ»0электропривод с линейной механической характеристикой приближенно можнопредставить в виде инерционного звена с постоянной времени Тм.
Переходную и весовуюфункции инерционного звена можно представить в виде:
(7.11)
(7.12)
По уравнениям(7.11) и (7.12) на рис. 7.5 построены временные характеристики электропривода при .
а) б)
Рис.7.5. Временные характеристики электропривода при .
Из полученных временных характеристик можно сделать вывод: электромеханическая постояннаявремени Тм представляет собой время, за которое электропривод достиг бы установившейсяскорости, двигаясь равномерно ускоренно под действием постоянного динамическогомомента, равного начальному значению:
Классификация электроприводов
По количеству и связи исполнительных, рабочих органов:
- Индивидуальный, в котором рабочий исполнительный орган приводится в движение одним самостоятельным двигателем, приводом.
- Групповой, в котором один двигатель приводит в действие исполнительные органы РМ или несколько органов одной РМ.
- Взаимосвязанный, в котором два или несколько ЭМП или ЭП электрически или механически связаны между собой с целью поддержания заданного соотношения или равенства скоростей, или нагрузок, или положения исполнительных органов РМ.
- Многодвигательный, в котором взаимосвязанные ЭП, ЭМП обеспечивают работу сложного механизма или работу на общий вал.
- Электрический вал, взаимосвязанный ЭП, в котором для постоянства скоростей РМ, не имеющих механических связей, используется электрическая связь двух или нескольких ЭМП.
По типу управления и задаче управления:
- Автоматизированный ЭП, управляемый путём автоматического регулирования параметров и величин.
- Программно-управляемый ЭП, функционирующий через посредство специализированной управляющей вычислительной машины в соответствии с заданной программой.
- Следящий ЭП, автоматически отрабатывающий перемещение исполнительного органа РМ с заданной точностью в соответствии с произвольно меняющимся сигналом управления.
- Позиционный ЭП, автоматически регулирующий положение исполнительного органа РМ.
- Адаптивный ЭП, автоматически избирающий структуру или параметры устройства управления с целью установления оптимального режима работы.
По характеру движения:
- ЭП с вращательным движением.
- Линейный ЭП с линейными двигателями.
- Дискретный ЭП с ЭМП, подвижные части которого в установившемся режиме находятся в состоянии дискретного движения.
По наличию и характеру передаточного устройства:
- Редукторный ЭП с редуктором или мультипликатором.
- Электрогидравлический с передаточным гидравлическим устройством.
- Магнитогидродинамический ЭП с преобразованием электрической энергии в энергию движения токопроводящей жидкости.
По роду тока:
- Переменного тока.
- Постоянного тока.
По степени важности выполняемых операций:
- Главный ЭП, обеспечивающий главное движение или главную операцию (в многодвигательных ЭП).
- Вспомогательный ЭП.
- Привод передач.
Механическая характеристика
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода.
Механическая характеристика — электропривод
Механическая характеристика электропривода при динамическом торможении имеет явно выраженный максимум, определяемый координатами максимального момента Жм и максимального скольжения su, соответствующего этому моменту.
Механическая характеристика электропривода является типовой для электроприводов с подчиненным регулированием. В зоне рабочих нагрузок электропривода, когда регулятор скорости AR работает на линейном участке своей статической характеристики, электропривод поддерживает заданную скорость вращения.
Механическая характеристика электроприводов подъема экскаватора для одного из положений сельсииного командоаппарата приведена на рис. 3 — 29 в. Системы управления обеспечивают надежное стопорение электропривода и возможность получения характеристик любой жесткости, что соответствует требованиям различных механизмов экскаваторов.
Если механическая характеристика электропривода не соответствует характеристике механизма, происходит завышение номинальной мощности, и, следовательно, увеличиваются массы, габаритные размеры и стоимость двигателя.
Жесткость механических характеристик электропривода обеспечивается наличием обратных связей по току и напряжению. При минимальной скорости вращения обратная связь по току максимальна, а по мере увеличения скорости вращения она ослабляется.
| Графическое определение — .| Механические характеристики асинхронного двигателя МТН 312 — 6 при изменении напряжения питания ( ПВ 40 %. |
Расчеты механических характеристик электроприводов и сопротивлений резисторов
| Схемы двухтокового питания. |
Получение механических характеристик электроприводов постоянного и переменного тока при параметрическом регулировании достигается за счет введения сопротивлений в цепи обмоток двигателей. Для крановых электроприводов практическое применение имеют схемы с использованием только активных сопротивлений.
| Нагрузочная диаграмма электропривода. |
Нарисовать механическую характеристику электропривода, когда задан полный сигнал задания вперед, а момент статической нагрузки изменяется от ММАХ до — ММАХ — Нарисовать внешнюю характеристику En f ( M) в тех же квадрантах.
Построить механическую характеристику электропривода, когда момент упора My 2 — Мн, а скорость холостого хода соответствует частоте напряжения на статоре 10 Гц.
Возможно формирование практически любых механических характеристик электропривода, вплоть до характеристик, аналогичных глубокорегулируемому реверсивному электроприводу постоянного тока с обратной связью по скорости.
| Статические характеристики асинхронного электропривода. |
Формирование горизонтального участка механической характеристики электропривода осуществляется в контуре регулирования скорости путем изменения величины сигнала L / PC в функции ошибки ( то есть разницы напряжений задатчи-ка ЗИ и датчика скорости ДС) по скорости.
Подбор электродвигателя
Качество работы современного электропривода во многом определяется правильным выбором используемого электрического двигателя, что в свою очередь обеспечивает продолжительную надёжную работу электропривода и высокую эффективность технологических и производственных процессов в промышленности, на транспорте, в строительстве и других областях.
При выборе электрического двигателя для привода производственного механизма руководствуются следующими рекомендациями:
- Исходя из технологических требований, производят выбор электрического двигателя по его техническим характеристикам (по роду тока, номинальным напряжению и мощности, частоте вращения, виду механической характеристики, продолжительности включения, перегрузочной способности, пусковым, регулировочным и тормозным свойствами др.), а также конструктивное исполнение двигателя по способу монтажа и крепления.
- Исходя из экономических соображений, выбирают наиболее простой, экономичный и надёжный в эксплуатации двигатель, не требующий высоких эксплуатационных расходов и имеющий наименьшие габариты, массу и стоимость.
- Исходя из условий окружающей среды, в которых будет работать двигатель, а также из требований безопасности работы во взрывоопасной среде, выбирают конструктивное исполнение двигателя по способу защиты.
Правильный выбор типа, исполнения и мощности электрического двигателя определяет не только безопасность, надёжность и экономичность работы и длительность срока службы двигателя, но и технико-экономические показатели всего электропривода в целом.
Реферат: электропривод 3 –
Цель работы
: Исследования электромеханических ω
= f
(I
) и механических ![]() характеристик при различных режимах работы и способах регулирования скорости электропривода с двигателем постоянного тока независимого возбуждения.
характеристик при различных режимах работы и способах регулирования скорости электропривода с двигателем постоянного тока независимого возбуждения.
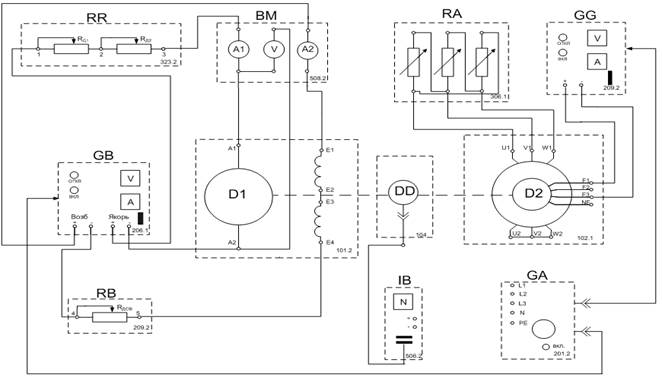
Рис. 1. Принципиальная электрическая схема для снятия характеристик в двигательном режиме
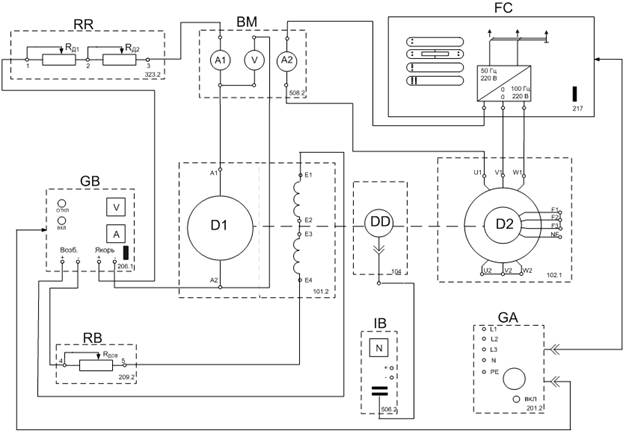
Рис. 2. Принципиальная электрическая схема для снятия характеристик в тормозных режимах
Базовые эксперименты выполняются на комплекте типового лабораторного оборудования «Электрический привод». В ходе их воспроизводятся установившиеся процессы в электроприводах постоянного и переменного тока.
Типовой комплект лабораторного оборудования предназначен для выполнения лабораторных работ по учебной дисциплине «Электрический привод (общий курс)» и смежным с ней дисциплинам.
Аппаратная часть комплекта выполнена по блочному (модульному) принципу и содержит:
– трехсоставной лабораторный стол со встроенным контейнером для хранения съемных функциональных блоков, проводников и методических материалов, рамами для установки необходимых в эксперименте функциональных блоков, выдвижной полкой для клавиатуры компьютера и подставкой для системного блока;
– электрические машины (выполненные в виде электромашинного агрегата), трансформаторы и элементы электрических цепей;
– источники питания;
– измерительные преобразователи и приборы.
Питание комплекса осуществляется от трехфазной электрической сети напряжением 380 В с нейтральным и защитным проводниками.
– Потребляемая мощность Вт, не более 500;
– Габариты (длина / ширина / высота), мм 2750´900´1600;
– Масса, кг, не более 250.
Назначение и описание функциональных блоков лабораторной установки (рис 1, рис 2.)
Трехфазный источник питания.
Предназначен для питания комплекта трехфазным переменным напряжением. Включается вручную. Имеет защиту от перегрузок, устройство защитного отключения, кнопку аварийного отключения и ключ от несанкционированного включения.
Источник питания машины постоянного тока.
Предназначен для питания обмоток якоря и возбуждения постоянным током. Включается вручную или дистанционно / автоматически (от ПЭВМ). Якорное напряжение регулируется вручную или дистанционно. Напряжение возбуждения нерегулируемое.
Возбудитель машины переменного тока.
Предназначен для питания обмотки возбуждения синхронной машины. Включается вручную или дистанционно / автоматически (от ПЭВМ). Напряжение возбуждения регулируется вручную или дистанционно / автоматически. Выходные цепи изолированы от входных.
Активная нагрузка.
Предназначена для моделирования однофазных и трехфазных потребителей активной энергии. Регулируется вручную.
Блок мультиметров.
Предназначен для измерения токов, напряжений, омических сопротивлений. Цифровой с жидкокристаллическим дисплеем.
Указатель частоты вращения.
Предназначен для отображения частоты вращения электрических машин в электромашинном агрегате в аналоговой форме.
Преобразователь угловых перемещений
Предназначен для преобразования скорости вращения электрических машин в сигнал цифрового вида.
Реостат.
Предназначен для ограничения пускового тока в цепи якоря двигателя постоянного тока.
Реостат возбуждения машины постоянного тока.
Предназначен для ручного регулирования тока возбуждения машины постоянного тока.
Преобразователь частоты.
Предназначен для регулирования частоты вращения асинхронного двигателя. Выходные частота и напряжение регулируются согласованно вручную или дистанционно / автоматически (от ПЭВМ).
Лабораторный стенд состоит из приборного блока и электромеханического агрегата на базе двух одинаковых механически связанных двигателей постоянного тока независимого возбуждения.
Исследуемая и нагрузочная машины жестко соединены между собой и представлены в виде электромашинного агрегата, дополненного маховиком и преобразователем угловых перемещений.
Схема тепловой защиты
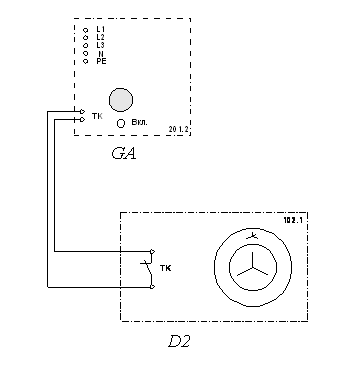
Рисунок 3 – Принципиальная электрическая схема соединений тепловой защиты машины переменного тока.
Перечень аппаратуры
Таблица 1
Обозначение | Наименование | Тип | Параметры |
D2 | Машина переменного тока | 102.1 | 100 Вт / 230 В~ / 1500 мин-1 |
GA | Трехфазный источник питания | 201.2 | 400 В~ / 16 А |
Обозначения и параметры исследуемой аппаратуры
Таблица 2
Принципиальные электрические схемы стендов
Принципиальная электрическая схема стенда подразделяется на два варианта (рис.1, рис.2).
Источник GА – источник синусоидального напряжения промышленной частоты.
Источник питания двигателя постоянного тока GB используется для питания регулируемым напряжением обмоток машины (двигателя) постоянного тока D1, работающей с независимым возбуждением. В этом случае половины обмотки возбуждения двигателя D1 следует соединить последовательно.
Преобразователь угловых перемещений DD генерирует импульсы, поступающие на вход указателя частоты вращения IB электромашинного агрегата.
Машина переменного тока D2, работающая в режиме генератора и обеспечивающая нагрузку на валу исследуемого двигателя, нагружена на активную нагрузку RA. Возбудитель GG питает обмотку возбуждения машины D2 регулируемым напряжением.
Реостат RR ограничивает ток цепи якоря двигателя D1. Реостат RB возбуждения машины переменного тока ограничивает ток цепи возбуждения двигателя D1.
С помощью мультиметров блока BM контролируются ток и напряжение якоря, а также ток возбуждения двигателя D1.
Для величин исследуемого двигателя D1 принят индекс 1, для нагрузочного двигателя D2-индекс 2.
Согласное или встречное включение двигателей D1 и D2 устанавливаем по изменению скорости вращения предварительно включенного двигателя. Если после пуска другого двигателя скорость возросла – двигатели включены согласно, если скорость снизилась – двигатели включены встречно.
Экспериментальная часть
Порядок экспериментального исследования электропривода:
· проверка работоспособности стенда;
· снятие естественной характеристики двигателя;
· снятие характеристик электропривода изменением напряжения питания U
двигателя;
· снятие характеристик электропривода введением добавочных сопротивлений Rд1 ,Rд2
в якорную цепь двигателя;
· снятие характеристик электропривода изменением магнитного потока Ф
обмотки возбуждения двигателя;
· снятие характеристик электропривода при шунтировании якоря двигателя;
· исследование режима рекуперативного торможения
· исследование режима торможения противовключением
· исследование режима динамического торможения;
· определение коэффициента связи ![]() исследуемого двигателя D1.
исследуемого двигателя D1.
1. Снятие естественной характеристики двигателя D1
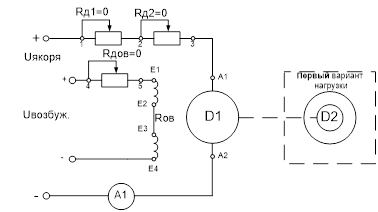
Рис.43. Схема для снятия естественной характеристики в двигательном режиме
Таблица 1.
I1 | 0,26 | 0,35 | 0,65 | 0,76 | 0,87 | 0,91 | 0,94 | 1 |
U1 | 220 | 220 | 220 | 220 | 220 | 220 | 220 | 220 |
n, мин-1 | 1800 | 1700 | 1600 | 1590 | 1510 | 1500 | 1500 | 1490 |
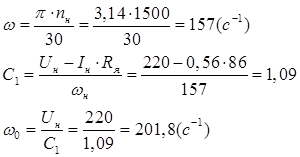
Угловая частота вращения w
двигателя D1:
и его электромагнитного момента М1
:
![]()
Таблица 2.
М1 | 0,28 | 0,39 | 0,69 | 0,78 | 0,89 | 0,93 | 0,95 | 1 |
ω, с-1 | 188,5 | 178 | 167,55 | 166,5 | 158,1 | 157 | 157 | 156 |
По данным таблиц 1 и 2 построим электромеханическую ![]() (рис. 11) и механическую
(рис. 11) и механическую ![]() (рис. 11) характеристики двигателя D1.
(рис. 11) характеристики двигателя D1.
2. Снятие характеристик электропривода изменением напряжения питания U1якоря двигателя D1
Таблица 3.
I1 | 0,19 | 0,23 | 0,27 | 0,35 | 0,47 | 0,55 | 0,61 | 0,81 | 0,91 |
U1 | 110 | 110 | 110 | 110 | 110 | 110 | 110 | 110 | 110 |
n, мин-1 | 900 | 820 | 800 | 790 | 700 | 680 | 610 | 500 | 400 |
Таблица 4.
М1 | 0,398 | 0,527 | 0,63 | 0,813 | 1,19 | 1,4 | 1,7 | 2,567 | 3,47 |
ω, с-1 | 94,2 | 85,87 | 83,776 | 82,73 | 73,3 | 71,2 | 63,88 | 52,36 | 41,89 |
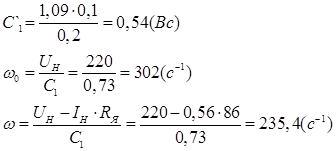
Пример расчета
:
![]()
![]() .
.
По данным таблиц 3 и 4 построим электромеханическую ![]() (рис. 10) и механическую
(рис. 10) и механическую ![]() (рис. 11) характеристики двигателя D1.
(рис. 11) характеристики двигателя D1.
3. Снятие характеристик электропривода введением добавочных сопротивлений Rд1 ,Rд2 в якорную цепь двигателя D1
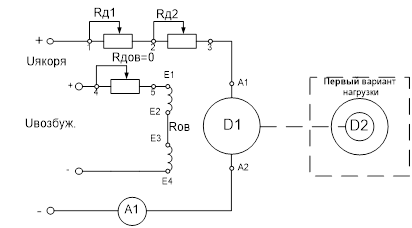
Рис. 5. Схема для снятия реостатных характеристик в двигательном режиме
Таблица 5. RД1=100 Ом, RД2=0 Ом.
I1 | 0,23 | 0,39 | 0,6 | 0,73 | 0,84 | 1 |
U1 | 202 | 188 | 168 | 156 | 147 | 124 |
n, мин-1 | 1620 | 1420 | 1200 | 1000 | 900 | 600 |
Проделаем опыт для больших значений добавочных сопротивлений RД1
и RД2
.
Таблица 6. RД1=100 Ом, RД2=100 Ом.
I1 | 0,22 | 0,33 | 0,51 | 0,62 | 0,68 | 0,7 | 0,74 |
U1 | 182 | 158 | 125 | 105 | 94 | 88 | 82 |
n, мин-1 | 1500 | 1200 | 820 | 600 | 450 | 350 | 300 |
Таблица 7 (RД1
=100 Ом, RД2
=0 Ом).
М1 | 0,24 | 0,42 | 0,6 | 0,75 | 0,82 | 0,94 |
ω, с-1 | 169,6 | 148,7 | 125,66 | 104,7 | 94,25 | 62,8 |
Таблица 8 (RД1
=100 Ом, RД2
=100 Ом).
М1 | 0,225 | 0,35 | 0,54 | 0,6 | 0,7 | 0,812 | 0,8 |
ω, с-1 | 157 | 125,66 | 85,87 | 62,8 | 47,1 | 36,65 | 31,4 |
Пример расчета
:
![]()
![]() .
.
По данным таблиц 5 – 8 построим электромеханическую ![]() (рис. 11) и механическую
(рис. 11) и механическую ![]() (рис. 11) характеристики двигателя D1.
(рис. 11) характеристики двигателя D1.
4. Снятие характеристик электропривода изменением магнитного потока Ф
обмотки возбуждения двигателя D1
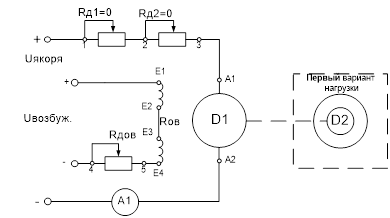
Рис. 6. Схема для снятия характеристик в двигательном режиме при
ослаблении магнитного потока
Таблица 9 (RДОБ = 200 Ом
).
I1 | 0,25 | 0,38 | 0,61 | 0,75 | 0,94 | 1 |
U1 | 220 | 218 | 216 | 214 | 213 | 212 |
n, мин-1 | 1900 | 1800 | 1700 | 1650 | 1600 | 1550 |
Проделаем опыт для большего значения добавочного сопротивления RДОВ
.
Таблица 10 (RДОБ = 400 Ом
).
I1 | 0,28 | 0,4 | 0,46 | 0,56 | 0,69 | 1 |
U1 | 219 | 218 | 217 | 216 | 215 | 211 |
n, мин-1 | 2000 | 1950 | 1900 | 1850 | 1800 | 1650 |
Таблица 11 (RДОБ = 200 Ом
).
М1 | 0,25 | 0,38 | 0,6 | 0,7 | 0,85 | 0,9 |
ω, с-1 | 199 | 188,5 | 178 | 172,8 | 167,55 | 162,3 |
Таблица 12 (RДОБ = 400 Ом
).
М1 | 0,26 | 0,37 | 0,425 | 0,5 | 0,6 | 0,845 |
ω, с-1 | 209,4 | 204,2 | 199 | 193,7 | 188,5 | 172,8 |
Пример расчета
:
![]()
![]() .
.
По данным таблиц 9 – 12 построим электромеханическую ![]() (рис. 11) и механическую
(рис. 11) и механическую ![]() (рис. 11) характеристики двигателя D1.
(рис. 11) характеристики двигателя D1.
5. Снятие характеристик электропривода при шунтировании якоря двигателя D1
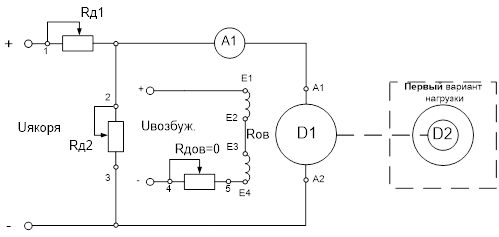
Рис.7. Схема для снятия характеристик в двигательном режиме
при шунтировании якоря
Таблица 13 (RД1
=100 Ом и RД2
= 70 Ом).
I1 | 0,21 | 0,24 | 0,31 | 0,46 | 0,53 | 0,57 |
U1 | 84,8 | 83,7 | 80,8 | 74,2 | 71 | 69,3 |
n, мин-1 | 700 | 690 | 510 | 390 | 310 | 290 |
Таблица 14
М1 | 0,20 | 0,22 | 0,34 | 0,5 | 0,596 | 0,6 |
ω, с-1 | 73,3 | 72,3 | 53,4 | 40,8 | 32,46 | 30,37 |
Пример расчета
:
![]()
![]() .
.
По данным таблиц 13 и 14, строим электромеханическую ![]() (рис. 11) и механическую
(рис. 11) и механическую ![]() (рис. 11) характеристики двигателя D1.
(рис. 11) характеристики двигателя D1.
6. Исследование режима рекуперативного торможения при работе двигателя D1 на реостатной характеристике
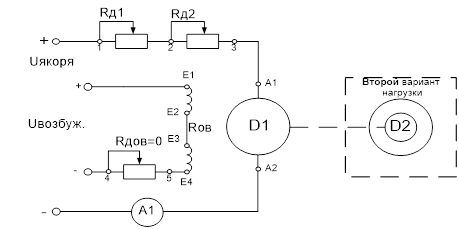
Рис.8. Схема для снятия реостатных характеристик в тормозных режимах
Таблица15 (RД1
=100 Ом и RД2
= 100 Ом).
I1 | 0,14 | 0,23 | 0,18 | 0,08 | 0,05 | 0,01 | -0,01 | -0,02 | -0,03 |
U1 | 54 | 36 | 45 | 66 | 72 | 81 | 102 | 131 | 187 |
n, мин-1 | 400 | 200 | 300 | 550 | 600 | 710 | 910 | 1200 | 1690 |
Таблица 16
М1 | 0,15 | 0,23 | 0,19 | 0,08 | 0,055 | 0,011 | -0,011 | -0,021 | -0,032 |
ω, с-1 | 41,89 | 20,9 | 31,4 | 57,6 | 62,8 | 74,35 | 95,3 | 125,66 | 177 |
Пример расчета
:
![]()
![]() .
.
По данным таблиц 15 и 16, строим электромеханическую ![]() (рис. 11) и механическую
(рис. 11) и механическую ![]() (рис. 11) характеристики двигателя D1.
(рис. 11) характеристики двигателя D1.
7. Исследование режима торможения противовключением при работе двигателя D1 на реостатной характеристике
Режим противовключения для двигателя D1 наступает при Δw1
>w0
.
Таблица 17 (RД1
=100 Ом и RД2
= 100 Ом).
I1 | 0,77 | 0,78 | 0,79 | 0,8 | 0,82 |
U1 | 70 | 97 | 112 | 124 | 134 |
n, мин-1 | -1000 | -1100 | -1300 | -1400 | -1700 |
Таблица 18
М1 | -0,147 | -0,314 | -0,352 | -0,393 | -0,372 |
ω, с-1 | -104,7 | -115,2 | -136,1 | -146,6 | -178 |
Пример расчета
:
![]()
![]() .
.
По данным таблиц 17 и 18, строим электромеханическую ![]() (рис. 11) и механическую
(рис. 11) и механическую ![]() (рис. 11) характеристики двигателя D1.
(рис. 11) характеристики двигателя D1.
8. Исследование режима динамического торможения двигателя D1
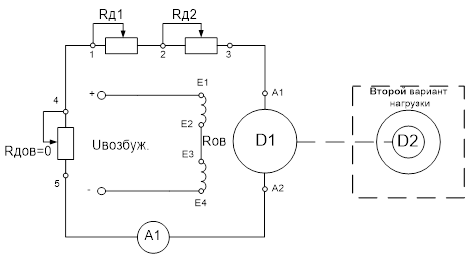
Рис. 9. Схема для снятия характеристик динамического торможения
Таблица 19 (RД1
=100 Ом и RД2
= 100 Ом).
I1 | -0,03 | -0,1 | -0,18 | -0,23 | -0,3 | -0,32 | -0,34 |
U1 | 6 | 21 | 37 | 48 | 61 | 65 | 69 |
n, мин-1 | 100 | 300 | 500 | 600 | 780 | 800 | 850 |
Таблица 20.
М1 | -0,023 | -0,088 | -0,167 | -0,23 | -0,296 | -0,328 | -0,35 |
ω, с-1 | 10,5 | 31,4 | 52,36 | 62,8 | 81,68 | 83,8 | 89 |
Пример расчета
:
![]()
![]() .
.
По данным таблиц 19 и 20, строим электромеханическую ![]() (рис. 11) и механическую
(рис. 11) и механическую ![]() (рис. 11) характеристики двигателя D1.
(рис. 11) характеристики двигателя D1.
9. Определение коэффициента связи C1 исследуемого двигателя D1
Таблица 21.
IВ | 0,14 | 0,12 | 0,11 | 0,1 | 0,09 | 0,08 | 0,07 | 0,06 |
U1 | 101 | 101 | 102 | 102 | 102 | 102 | 102 | 102 |
n, мин-1 | 900 | 1000 | 1020 | 1100 | 1150 | 1200 | 1300 | 1450 |
Таблица 22.
ω0 | 94,25 | 104,7 | 106,8 | 115,19 | 120,4 | 125,66 | 136,14 | 151,84 |
С1 | 1,07 | 0,965 | 0,955 | 0,885 | 0,847 | 0,812 | 0,749 | 0,672 |
Пример расчета
:
![]()
По данным таблиц 21 и 22 построим характеристику C1
=f
(IВ
), (рис. 10).
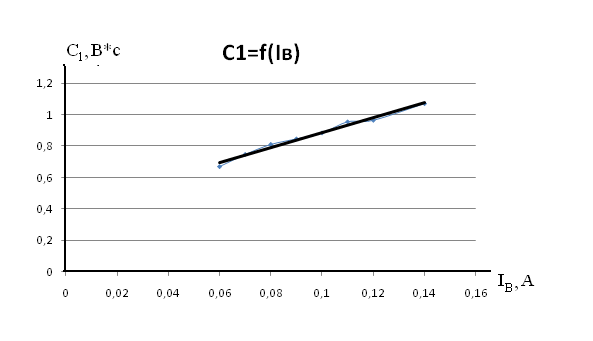
Рис. 10. Характеристика C1=f(IВ).
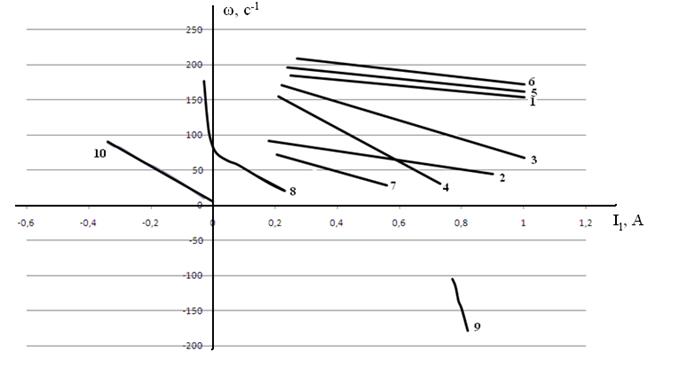
Рис. 11. Электромеханические характеристики ω = ƒ(I1) двигателя независимого возбуждения
1 – естественная хар-ка;
2 – искусств. U<Uн;
3 – искусств. Rд≠0, (RД1
=100 Ом, RД2
=0 Ом);
4 – искусств. Rд≠0, (RД1
=100 Ом, RД2
=0 Ом);
5 – искусств. Ф<Фн, (R=200 Ом);
6 – искусств. Ф<Фн, (R=400 Ом);
7 – искусств. с шунтиров-ем, (RД1
=100 Ом и RД2
= 70 Ом);
8 – рекуперативное торможение;
9 – торможение противовключением;
10 – динамическое торможение.
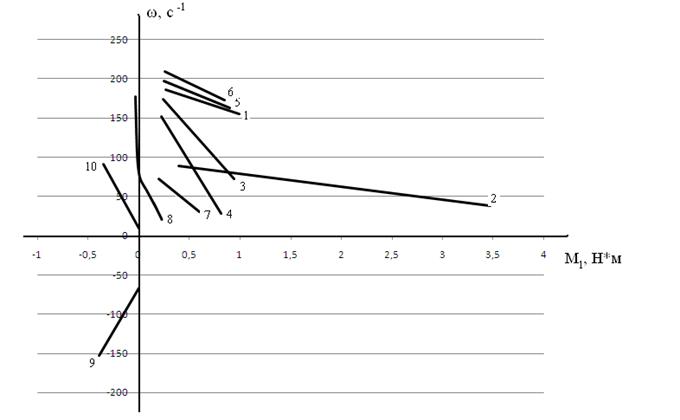
Рис. 12. Механические характеристики ω = ƒ(М1
) двигателя независимого возбуждения
1 – естественная хар-ка;
2 – искусств. U<Uн;
3 – искусств. Rд≠0, (RД1
=100 Ом, RД2
=0 Ом);
4 – искусств. Rд≠0, (RД1
=100 Ом, RД2
=0 Ом);
5 – искусств. Ф<Фн, (R=200 Ом);
6 – искусств. Ф<Фн, (R=400 Ом);
7 – искусств. с шунтиров-ем, (RД1
=100 Ом и RД2
= 70 Ом);
8 – рекуперативное торможение;
9 – торможение противовключением;
10 – динамическое торможение.
Расчетная характеристика ω = ƒ(I1)
Данные для расчета:
U1
= UH
= 220 В
RДОБ
= R1
= 100 Ом
IB1
= 0,2 A
RЯ
= 86 Ом
IH
= 0,56 A
nн
=1500 об/мин
При изменении добавочного сопротивления

При изменении тока возбуждения
По полученным значениям строим характеристику ω = ƒ(I1
) (рис. 12)
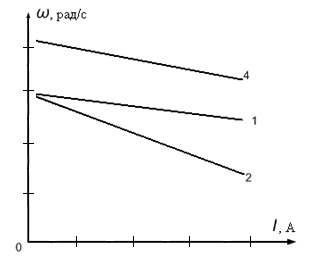
Рис.13. Характеристика ω = ƒ(I1
).
1- естественная хар-ка
2- при изменении добавочного сопротивления
3- при изменении тока возбуждения
Студентка гр. 7А86 Заостровных А.В.
Выводы:
1)Естественные механическая и электромеханическаяхарактеристики,
снятые при номинальных данных, имеют вид гиперболы бесконечно приближенной к оси ω с одной стороны, с другой – к прямой параллельной оси момента (тока).
Скорости холостого хода ДПТНВ не имеет, т.к. при малых токах (моментах) магнитный поток →0, а скорость резко увеличивается и двигатель работает вразнос.
Характеристики располагаются в первом квадранте.
Уравнение механической характеристики: ![]() (1)
(1)
Уравнение электромеханической характеристики:![]()
![]()
![]() (2)
(2)
2) Регулирование скорости изменением магнитного потока
возможно только вверх от естественной характеристики. При уменьшении Iв (потока) скорость увеличивается, при этом скорость холостого хода увеличивается, а ток короткого замыкания уменьшается, жесткость также уменьшается. Это экономичный способ регулирования, так как регулирование производится в маломощной цепи возбуждения. Регулирование производится только в сторону уменьшения потока (увеличения скорости), так как увеличение потока возбуждения не допустимо, так как это вызовет перегрев двигателя. (см формулы (1) и (2))
3)Режим торможения противовключением
в нашем случае осуществлялся при изменении активной нагрузки на валу двигателя. Так как момент на валу нагрузочной машины и их направления противоположны, то рабочая машина вращается в противоположном направлении и ее скорость условно отрицательна. Поэтому характеристика противовключения идет в четвертом квадранте.
Министерство образования и науки Российской Федерации
Государственное образовательное учреждение высшего
профессионального образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Институт – Энергетический
Направление – «Электротехника, электромеханика, электротехнологии»
Кафедра – Электрический привод и электрооборудование
Отчет по лабораторной работе №1
По дисциплине «Электропривод»
Исполнитель:
Студентка группы 7А86 _____________ Заостровных А.В.
(Дата, подпись)
Руководитель: _____________ Однокопылов И.Г.
_____________ Семенов С.М.
(Дата, подпись)
Томск – 2021
Статические характеристики
Под статическими характеристиками чаще всего подразумеваются электромеханическая и механическая характеристика.
Электромеханическая характеристика двигателя
Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
Динамическая характеристика электропривода — это зависимость между мгновенными значениями двух координат электропривода для одного и того же момента времени переходного режима работы.





